Mind children : the future of robot and human intelligence
Sourced from scanned PDF via OCR — view quality check
Overview unavailable.
Book Front Matter
- Identifies the book as Mind Children: The Future of Robot and Human Intelligence by Hans Moravec, published by Harvard University Press in 1988.
- Includes copyright, ISBN, Library of Congress cataloging data, and digitization information from the Internet Archive.
- Contains personal dedications to the author’s father, mother, and Ella.
- Lists the table of contents, including chapters on robotics, artificial intelligence, human-machine symbiosis, and computation.
- Provides a list of figures related to intelligence, robots, computing power, vision, virtual environments, and theoretical computation.
Hans Moravec
CHILDREN^
The Future of Robot and *"
Human Intelligence
Digitized by the Internet Archive
in 2010
http://www.archive.org/details/mindchildrenfutuOOmora
Mind Children
MIND CHILDREN
The Future of Robot
and Human Intelligence
Hans Moravec
HARVARD UNIVERSITY PRESS
Cambridge, Massachusetts
London, England
Copyright © 1988 by Hans Moravec
All rights reserved
Printed in the United States of America
10 98765432
Library of Congress Cataloging-m-Publication Data
Moravec, Hans
P.
Mind children
:
the future of robot and human intelligence /
Hans Moravec.
p.
cm.
Bibliography:
p.
Includes index.
ISBN 0-674-57616-0 (cloth)
ISBN 0-674-57618-7 (paper)
1.
Artificial intelligence.
2. Robotics.
I. Title.
Q335.M65 1988
88-21343
006.3 — dcl9
CIP
In memory of my father, who taught me to tinker
To my mother, ivho taught me to read
To Ella, who made me complete
Contents
Prologue
1
1
Mind in Motion
6
2
Powering Up
51
3
Symbiosis
75
4
Grandfather Clause
100
5
Wildlife
125
6
Breakout
147
Appendix 1
Retinas and Computers
163
Appendix 2
Measuring Computer Power
169
Appendix 3
The Outer Limits of Computation
178
Bibliography
197
Acknowledgments and
Illustration Credits
203
Index
207
Figures
Intelligence on Earth
18
Walking Machine
27
Five Legs
28
Three Fingers
30
Autonomous Navigation
33
Object Finding
35
A General-Purpose Robot
38
The Retina
54
Comparative Computational Power and Memory
61
A Century of Computing
64
ENIAC
76
Magic Glasses (Early Model)
87
Robot Proxy
88
Unreal Estate—The Road to Point Reyes
92
A Robot Bush
103
The Corpus Callosum
113
Computer Virus Blowup
130
Selfish Martians
142
Spacetime Pyramid
156
Large Spacetime Pyramids from Small
157
I Think, Therefore
I Am
180
Two-Slit Experiment
184
Two Slits and Waves
185
Robot Pals
202
Mind Children
Prologue
The Rise of Mind Children
- Biological evolution has been superseded by cultural evolution, a process that moves at a much faster pace than genetic change.
- Humanity is on the verge of creating 'postbiological' descendants—intelligent machines that will eventually transcend human complexity.
- While these artificial entities currently require human care, they will soon mature into independent beings capable of confronting universal challenges.
- The transition from biological to artificial life is viewed as a natural 'passing of the torch' where humans, as aged parents, will eventually fade away.
- The exponential growth of computational power suggests that almost every human function will soon have a superior artificial counterpart.
- These 'children of our minds' may preserve the entirety of human knowledge and even the specific workings of individual human minds.
Unleashed from the plodding pace of biological evolution, the children of our minds will be free to grow to confront immense and fundamental challenges in the larger universe.
Prologue
E NGAGED
for billions of years
in
a
relentless,
spiraling arms
race with one another, our genes have
finally out-
smarted themselves.
They have produced a weapon so powerful
it
will vanquish the losers and winners
alike.
This device
is not the
hydrogen bomb—widespread use of nuclear weapons would merely
delav
the immensely more
interesting demise
that has been
engi-
neered.
What awaits
is not oblivion but rather a future which, from our
present vantage point, is best described by the words "postbiological"
or even "supernatural."
It
is a world in which the human race has
been swept away by the tide of cultural change, usurped by
its own
artificial progeny.
The ultimate consequences are unknown, though
many intermediate steps are not only predictable but have already
been taken.
Today, our machines are
still simple creations, requiring
the
parental
care and
hovering
attention
of any newborn,
hardly
worthy of the word
"intelligent."
But within the next century they
will mature into entities as complex as ourselves, and eventually into
something transcending everything we know—in whom we can take
pride when they refer to themselves as our descendants.
Unleashed
from
the plodding
pace
of
biological
evolution,
the
children of our minds will be free to grow to confront immense and
fundamental challenges in the larger universe. We humans will benefit
for a time from their labors, but sooner or later, like natural children,
they will seek their own fortunes while we, their aged parents, silently
fade away. Very little need be lost in this passing of the torch— it will
be in our artificial offspring's power, and to their benefit, to remember
almost everything about us, even, perhaps, the detailed workings of
individual human minds.
Mi)id Children
The process began about 100 million years ago, when certain gene
lines hit upon a way to make animals with the ability to learn some
behaviors from their elders during
life, rather than inheriting them
all
at conception.
It was compounded
10 million years ago when
our primate ancestors began
to rely on tools made of bones,
sticks,
and stone, and accelerated again with the harnessing of fire and the
development of complex languages about
1 million years ago. By the
time our species appeared, around 100 thousand years ago, cultural
evolution, the juggernaut our genes had unwittingly constructed, was
rolling with irresistible momentum.
Within the last 10 thousand years, changes within the human gene
pool have been inconsequential in comparison with the snowballing
advances in human culture. We have witnessed
first an agricultural
revolution, followed by the establishment of large-scale bureaucratic
governments
with
the power
to
levy
taxes
for
their support,
the
development
of written
languages,
and
the
rise
of
leisure
classes
with
time and
energy
to devote
to
intellectual
concerns.
In
the
last thousand years or
so, inventions beginning with movable type
printing have greatly speeded the flow of cultural information, and
thus its evolutionary pace.
With
the coming
of the
industrial
revolution 200 years
ago, we
entered the final phase, one in which artificial substitutes for human
body functions such as lifting and transporting have become ever more
economically attractive—indeed, indispensable. Then, 100 years ago,
with the invention of practical calculating machines, we were able for
the first time to artificially duplicate some small but vexing functions
of the human mind. The computational power of mechanical devices
has risen a thousandfold every 20 years since then.
We are very near
to the time when virtually no essential human
function, physical or mental, will lack an
artificial counterpart.
The
embodiment
of
this convergence
of cultural developments
will be
the intelligent robot, a machine that can think and act as a human,
however inhuman
it may be
in
physical
or mental
detail.
Such
machines could carry on our cultural evolution, including their own
construction and increasingly rapid self-improvement, without us, and
without the genes that built us. When that happens, our DNA will
find itself out of a job, having lost the evolutionary race to a new kind
of competition.
The Second Genetic Takeover
- Intelligent machines may soon carry on cultural evolution independently, rendering biological DNA obsolete in the evolutionary race.
- Chemist A. G. Cairns-Smith proposes that life originated from microscopic clay crystals that evolved through structural defects and reproduction.
- The first 'genetic takeover' occurred when carbon-based molecules replaced clay crystals as the primary carriers of genetic information.
- Humanity is currently transitioning from a purely biological existence to one dependent on a vast corpus of external cultural and digital information.
- The eventual autonomy of machines in their own reproduction and self-improvement will mark a second complete genetic takeover.
- This transition raises the critical question of whether human minds will survive the shift or be discarded along with our biological genes.
When that happens, our DNA will find itself out of a job, having lost the evolutionary race to a new kind of competition.
Mi)id Children
The process began about 100 million years ago, when certain gene
lines hit upon a way to make animals with the ability to learn some
behaviors from their elders during
life, rather than inheriting them
all
at conception.
It was compounded
10 million years ago when
our primate ancestors began
to rely on tools made of bones,
sticks,
and stone, and accelerated again with the harnessing of fire and the
development of complex languages about
1 million years ago. By the
time our species appeared, around 100 thousand years ago, cultural
evolution, the juggernaut our genes had unwittingly constructed, was
rolling with irresistible momentum.
Within the last 10 thousand years, changes within the human gene
pool have been inconsequential in comparison with the snowballing
advances in human culture. We have witnessed
first an agricultural
revolution, followed by the establishment of large-scale bureaucratic
governments
with
the power
to
levy
taxes
for
their support,
the
development
of written
languages,
and
the
rise
of
leisure
classes
with
time and
energy
to devote
to
intellectual
concerns.
In
the
last thousand years or
so, inventions beginning with movable type
printing have greatly speeded the flow of cultural information, and
thus its evolutionary pace.
With
the coming
of the
industrial
revolution 200 years
ago, we
entered the final phase, one in which artificial substitutes for human
body functions such as lifting and transporting have become ever more
economically attractive—indeed, indispensable. Then, 100 years ago,
with the invention of practical calculating machines, we were able for
the first time to artificially duplicate some small but vexing functions
of the human mind. The computational power of mechanical devices
has risen a thousandfold every 20 years since then.
We are very near
to the time when virtually no essential human
function, physical or mental, will lack an
artificial counterpart.
The
embodiment
of
this convergence
of cultural developments
will be
the intelligent robot, a machine that can think and act as a human,
however inhuman
it may be
in
physical
or mental
detail.
Such
machines could carry on our cultural evolution, including their own
construction and increasingly rapid self-improvement, without us, and
without the genes that built us. When that happens, our DNA will
find itself out of a job, having lost the evolutionary race to a new kind
of competition.
Prologue
A. G. Cairns-Smith, a chemist who has contemplated the beginnings
of Hfe on
the early
earth,
calls
this kind
of internal coup a genetic
takeover.
He suggests that
it has happened
at least once before.
In
Seven Clues
to the Origin of Life, Cairns-Smith argues that the precur-
sors
to
life as we know
it were microscopic crystals of clay, which
reproduced by the simple process of crystal growth.
Most crystals
are marked by patterns of dislocation in the orderly arrangement of
their atoms, many of which propagate as the crystal grows.
If the
crystal should fracture, each piece may inherit a copy of the pattern,
sometimes with
a
slight change.
Such defects can have a dramatic
effect on a clay's physical and chemical properties.
Crystals sharing
one dislocation pattern may form dense clumps, while those with an-
other mav aggregate into a spongy mass. Mineral-bearing water may
be diverted around one type but trickle through the other, providing
raw materials for continued growth. The patterns also affect growth
indirectly by modulating the chemistry of other molecules in their
environment. Clays are powerful chemical catalysts; the tiny crystals
have enormous total surface area, to which molecules can adhere in
certain configurations, depending on the external shape of the crystal
and molecule in question.
These common crystals thus possess the
essentials for Darwinian evolution—reproduction, inheritance, muta-
tion, and differences in reproductive success.
In Cairns-Smith's theory, the first genetic takeover began when some
clay species,
in vigorous Darwinian competition with one another,
began to encode some genetic information externally in long carbon
molecules.
Such polymers are more stable than the easily disturbed
dislocation patterns themselves, and organisms using them
to ever
greater extent reproduced more
successfully.
Although
utterly de-
pendent at
first on the existing crystal-based chemical machinery, as
these carbon molecules assumed a greater share of the reproductiv^e
role they became
less
reliant on
the
crystals.
In
time,
the simple
crystal
scaffolding vanished
altogether,
leaving
in
its evolutionary
wake the complex, interdependent system of organic machinery we
call
life.
Today,
billions
of years
later,
another change
is under way
in
how
information
passes from
generation
to
generation.
Humans
evolved frc^m organisms defined almost totally by their organic genes.
We now
rely
additionally on
a
vast and
rapidly growing corpus
Mind Children
of cultural information generated and stored outside our genes—in
our nervous systems,
libraries, and, most recently, computers.
Our
culture still depends utterly on biological human beings, but with each
passing year our machines,
a major product of the culture, assume
a greater role in
its maintenance and continued growth.
Sooner or
later our machines
will become knowledgeable enough
to handle
their own maintenance, reproduction, and self-improvement without
help. When this happens, the new genetic takeover will be complete.
Our
culture
will then be able
to evolve independently
of human
biology and
its limitations, passing instead directly from generation
to generation of ever more capable intelligent machinery.
Our biological genes, and the flesh and blood bodies they build,
will play a rapidlv diminishing role in this new regime. But will our
minds, where culture originated, also be lost in the coup?
Perhaps
not. The coming revolution may liberate human minds as effectively
as
it liberates human culture.
In the present condition we are un-
comfortable halfbreeds, part biology, part culture, with many of our
biological
traits out of step with the inventions of our minds.
Our
minds and genes may share many common goals during life, but there
is a tension between time and energy spent acquiring, developing,
and
spreading ideas and
effort expended toward
maintaining our
bodies and producing a new generation (as any parent of teenagers
can observe). The uneasy truce between mind and body breaks down
completely as life ends. Our genes usually surv'ive our death, grouped
in different ways in our offspring and our relatives.
In a subtle way
it
is no doubt in their evolutionary interest to regularly experiment
like
this with
fresh shuffles of the genetic deck.
But the process
is
devastating for our other half. Too many hard-earned aspects of our
mental existence simply die with us.
It is easy to imagine human thought freed from bondage to a mortal
body—belief in an afterlife is common. But it is not necessary to adopt
a mystical or religious stance
to accept the possibihty.
Computers
provide a model
for even the most ardent mechanist. A computa-
tion in progress—what we can reasonably call a computer's thought
process—can be halted
in midstep and transferred, as program and
data read out of the machine's memory,
into a physically different
computer, there to resume as though nothing had happened. Imagine
that a human mind might be freed from
its brain in some analogous
(if much more technically challenging) way.
The Postbiological Mind
- Human existence is defined by a tension between biological imperatives and the cultural/mental desire to preserve knowledge.
- Death is a genetic strategy for rejuvenation that unfortunately destroys the hard-earned mental data of the individual.
- The computer model suggests that a mind's 'process' could theoretically be transferred to new hardware, bypassing biological mortality.
- True immortality would require a mind to be reprogrammed for constant internal adaptation rather than the natural progression toward rigidity.
- A world of self-improving 'mind children' would represent a shift in evolution as significant as the transition from chemistry to biology.
- The author predicts that robots with human-level intelligence will be a reality within the next fifty years.
A computation in progress—what we can reasonably call a computer's thought process—can be halted in midstep and transferred, as program and data read out of the machine's memory, into a physically different computer, there to resume as though nothing had happened.
Mind Children
of cultural information generated and stored outside our genes—in
our nervous systems,
libraries, and, most recently, computers.
Our
culture still depends utterly on biological human beings, but with each
passing year our machines,
a major product of the culture, assume
a greater role in
its maintenance and continued growth.
Sooner or
later our machines
will become knowledgeable enough
to handle
their own maintenance, reproduction, and self-improvement without
help. When this happens, the new genetic takeover will be complete.
Our
culture
will then be able
to evolve independently
of human
biology and
its limitations, passing instead directly from generation
to generation of ever more capable intelligent machinery.
Our biological genes, and the flesh and blood bodies they build,
will play a rapidlv diminishing role in this new regime. But will our
minds, where culture originated, also be lost in the coup?
Perhaps
not. The coming revolution may liberate human minds as effectively
as
it liberates human culture.
In the present condition we are un-
comfortable halfbreeds, part biology, part culture, with many of our
biological
traits out of step with the inventions of our minds.
Our
minds and genes may share many common goals during life, but there
is a tension between time and energy spent acquiring, developing,
and
spreading ideas and
effort expended toward
maintaining our
bodies and producing a new generation (as any parent of teenagers
can observe). The uneasy truce between mind and body breaks down
completely as life ends. Our genes usually surv'ive our death, grouped
in different ways in our offspring and our relatives.
In a subtle way
it
is no doubt in their evolutionary interest to regularly experiment
like
this with
fresh shuffles of the genetic deck.
But the process
is
devastating for our other half. Too many hard-earned aspects of our
mental existence simply die with us.
It is easy to imagine human thought freed from bondage to a mortal
body—belief in an afterlife is common. But it is not necessary to adopt
a mystical or religious stance
to accept the possibihty.
Computers
provide a model
for even the most ardent mechanist. A computa-
tion in progress—what we can reasonably call a computer's thought
process—can be halted
in midstep and transferred, as program and
data read out of the machine's memory,
into a physically different
computer, there to resume as though nothing had happened. Imagine
that a human mind might be freed from
its brain in some analogous
(if much more technically challenging) way.
Prologue
A mind would require many modifications
to operate effectively
after being rescued from the limitations of a mortal body.
Natural
human mentality
is tuned for a
life span's progression from impres-
sionable
plasticity
to self-assured
rigidity, and thus
is unpromising
material
for
immortality.
It would have
to be reprogrammed
for
continual adaptability to be long viable.
Whereas a transient mortal
organism can leave the task of adaptation to the external processes of
mutation and natural selection, a mind
that aspires to immortality,
whether
it
traces
its beginnings
to
a mortal human being or
is
a
completely
artificial creation, must be prepared
to adapt constantly
from the inside.
Perhaps
it would undergo a
cyclical rejuvenation, acquiring new
hardware and software in periodic phases that resemble childhood. Or
maybe it could update the contents of its mind and body continuously,
adding and deleting, testing components in all kinds of combinations,
to keep up
with
changing
conditions.
The
testing
is
of
central
importance:
it steers the evolution.
If the individual makes too many
bad decisions in these
tests,
it will
fail
totally,
in the old-fashioned
Darwinian way.
A postbiological world dominated by self-improving, thinking ma-
chines would be as different from our own world of living things as
this world
is different from the lifeless chemistry that preceded
it. A
population consisting of unfettered mind children
is quite unimag-
inable.
We are going
to
try
to imagine some of the consequences
anyway.
1
Mind in Motion
I BELIEVE
that robots with human intelHgence
will be common within fifty years. By comparison, the best of today's
machines have minds more like those of insects than humans.
Yet
this performance itself represents a giant leap forward in just a few
decades.
Mechanical imitations of certain human functions have been with
us
for
centuries.
Many medieval clock towers
are equipped with
mechanisms that mark the hours with elaborate morality plays enacted
by mechanical saints, knights, bishops, angels, demons, and all kinds
of animals. Smaller devices that walked, talked, swam, breathed, ate,
wrote with quill pens, or played musical instruments have amused
polite society since at least the fifteenth century.
Leonardo da Vinci,
for one,
constructed
elaborate mechanical displays
of
this
sort
for
his patrons.
These early clockwork machines—powered by running
water, falling weights, or springs—copied the motions of living things,
but they could not respond to the world around them.
They could
only act, however charmingly.
Electrical, electronic, and radio technology, developed early in this
century, made possible machines
that could
react—to
light, sound,
and invisible remote control. The result was a number of entertaining
demonstration robots—as well as thoughts and stories about future
humanlike machines.
But only simple connections between the sen-
sors and motors were possible at
first. These newer machines could
sense as well as act, but they could not think.
Machines That Think (Weakly)
During World War
II analog computers—machines
that simulated
physical systems by representing their changing quantities as analo-
The Evolution of Cybernetics
- Early clockwork machines could mimic the motions of living things but lacked the ability to respond to their environment.
- The development of electrical and radio technology allowed machines to react to light and sound, though they still lacked cognitive processing.
- World War II analog computers inspired the field of cybernetics, which unified the study of control and communication in animals and machines.
- W. Grey Walter's electronic turtles demonstrated complex social behaviors and the ability to learn through conditioned stimuli.
- The Johns Hopkins Beast represented a peak in cybernetic design, capable of navigating hallways and independently seeking wall outlets to recharge.
- Despite its successes, the field of cybernetics was eventually eclipsed by the rise of digital artificial intelligence.
The Beast inspired a number of imitators. Some added new motions such as 'Shake to untangle recharging arm' to the repertoire of basic actions.
1
Mind in Motion
I BELIEVE
that robots with human intelHgence
will be common within fifty years. By comparison, the best of today's
machines have minds more like those of insects than humans.
Yet
this performance itself represents a giant leap forward in just a few
decades.
Mechanical imitations of certain human functions have been with
us
for
centuries.
Many medieval clock towers
are equipped with
mechanisms that mark the hours with elaborate morality plays enacted
by mechanical saints, knights, bishops, angels, demons, and all kinds
of animals. Smaller devices that walked, talked, swam, breathed, ate,
wrote with quill pens, or played musical instruments have amused
polite society since at least the fifteenth century.
Leonardo da Vinci,
for one,
constructed
elaborate mechanical displays
of
this
sort
for
his patrons.
These early clockwork machines—powered by running
water, falling weights, or springs—copied the motions of living things,
but they could not respond to the world around them.
They could
only act, however charmingly.
Electrical, electronic, and radio technology, developed early in this
century, made possible machines
that could
react—to
light, sound,
and invisible remote control. The result was a number of entertaining
demonstration robots—as well as thoughts and stories about future
humanlike machines.
But only simple connections between the sen-
sors and motors were possible at
first. These newer machines could
sense as well as act, but they could not think.
Machines That Think (Weakly)
During World War
II analog computers—machines
that simulated
physical systems by representing their changing quantities as analo-
Mind in Motion
gous mo\es oi shafts or voltages—were designed for controlling anti-
aircraft guns, for navigating, and for precision bombing. Some of their
developers noticed a similarity' between the operation of these devices
and
the
regiilator\- svstems
in
living
things, and
these
researchers
were inspired to build machines that acted as though they were alive.
Norbert Wiener
at the Massachusetts
Institute of Technology (MIT)
coined the term cvbemetics for this unified studv of control and com-
munication in animals and machines.
Its practitioners combined new
theorv on feedback regulation with advances
in postwar electronics
and earlv kno\vledge of living nervous svstems to build machines that
were able to respond like simple animals and to learn. The rudiments
of artificial thought had arrived.
Among
the highUghts
oi
the cvbemetics
effort was
a
series
of
electronic turtles built during the 1950s bv \V. Grev Walter, a British
psvchologist. With subminiature radio-tube electronic brains, rotating
phototube eves, microphone ears, and contact-switch feelers, the first
versions could locate their recharging hutch when their batteries ran
low and
other^vise
a\"oid
trouble
\s'hile wandering
about.
Groups
of them
exhibited
complex
social behavior bv
responding
to
one
another's control
lisihts and touches. A later machine with the same
senses could be conditioned
to associate one stimulus with another
and could
learn bv repeated
experience
that,
for
instance,
a loud
noise would be followed bv
a kick to
its
shell.
Once educated, the
turtle would
avoid
a
noise
as
it had
before responded
to
a
kick.
The
associations were slowlv accumulated
as
electrical
charges
in
electronic devices called capacitors, used here as memory- devices.
Perhaps
the most
impressive
creation
of
the
cvbemeticists was
the Johns Hopkins
Beast.
Built bv
a group
oi
brain
researchers
in
the
earlv
1960s,
it wandered
the
halls guided bv
sonar and
a
specialized photocell eve that searched for the distinctive black cover
plate of wall outlets, where
it would plug itself m to feed. The Beast
inspired a number of imitators. Some used special circuits connected
to
television cameras instead
of photocells and were controlled bv
assemblies oi (then new) transistor digital logic gates, Uke those that
can now be found, in thousands and millions, in the integrated circuits
of
ever\- computer
Some added new motions such
as "Shake
to
untangle recharging arm" to the repertoire of basic actions.
The
field of cybernetics thrived
less than two decades.
As
is so
often the case,
it was eclipsed bv a relative, the artificial intelligence
Mind Children
movement.
The war's many small analog computers, which had
inspired cybernetics, had a few much larger digital cousins.
These
machines computed
not by
the measured
turns
of
shafts
or flow
of current but by counting,
in discrete jumps.
The
first automatic
digital computers—huge, immobile, autonomous calculators—were
completed toward the end of the war. Colossus, an ultrasecret British
machine that broke the German Enigma code and helped to change
the course of the war, scanned code keys tens of thousands of times
faster than humanly possible.
In the United States, ENIAC computed
antiaircraft artillery tables for the Army and later did calculations for
the construction of the atomic bomb, at speeds similar to Colossus.
Less belligerently, these "giant brains," as they came to be called,
provided unprecedented opportunities for experiments in complexity.
Pioneers like Alan Turing, one of the creators of Colossus, and John
von Neumann, who was involved with the first American machines,
harbored
the hope
that
the
ability
to
think
rationally, our unique
asset
in dealing with
the world, could be captured
in
a machine.
Our minds might be amplified by computers
just
as our muscles
had been amplified by the steam engines of the industrial revolution.
Programs
to reason and
to play
intellectual games
like chess were
designed by Claude Shannon of MIT and by Turing in 1950, but the
earliest computers were too limited and expensive for this use. A few
poor checker-playing programs did appear on
the
first commercial
machines of the early 1950s, and equally poor chess programs showed
up in the
last half of that decade, along with a good checker player
by Arthur Samuel of IBM. Then
in 1957 Allen Newell and Herbert
Simon of Carnegie Tech (now Carnegie Mellon University) and John
Shaw of the RAND Corporation demonstrated the Logic Theorist, the
first program able to reason about arbitrary matters by starting with
axioms and applying rules of inference to prove theorems.
In
1960 John
McCarthy,
then
at
MIT,
coined
the term
artificial
intelligence (AI) for the effort to make computers think.
By 1965 the
first students of McCarthy, Marvin Minsky (also at MIT), Newell, and
Simon had produced AI programs that proved theorems in geometry,
solved problems from intelligence
tests, algebra books, and calculus
exams, and played chess, all with the proficiency of an average college
freshman.
Each program could
handle only one narrow
type
of
problem, but for
first efforts these programs were encouraging—so
encouraging
that most people involved
felt that another decade of
The Dawn of Artificial Intelligence
- Early digital computers like Colossus and ENIAC were born from wartime necessity, performing calculations at speeds far beyond human capability.
- Pioneers like Alan Turing and John von Neumann envisioned computers as 'giant brains' capable of replicating human rational thought.
- The 1950s and 60s saw the birth of programs like the Logic Theorist and the official coining of the term 'artificial intelligence' by John McCarthy.
- Initial rapid success in solving geometry and calculus problems led to an 'understandable miscalculation' that true machine intelligence was only a decade away.
- Despite massive increases in raw computing power, progress transitioned from a 'heady sprint' to a 'plodding trudge' as the complexity of general intelligence became apparent.
- Modern AI has found success in 'expert systems' and narrow domains like chess, symbolic math, and restricted language processing.
Our minds might be amplified by computers just as our muscles had been amplified by the steam engines of the industrial revolution.
Mind Children
movement.
The war's many small analog computers, which had
inspired cybernetics, had a few much larger digital cousins.
These
machines computed
not by
the measured
turns
of
shafts
or flow
of current but by counting,
in discrete jumps.
The
first automatic
digital computers—huge, immobile, autonomous calculators—were
completed toward the end of the war. Colossus, an ultrasecret British
machine that broke the German Enigma code and helped to change
the course of the war, scanned code keys tens of thousands of times
faster than humanly possible.
In the United States, ENIAC computed
antiaircraft artillery tables for the Army and later did calculations for
the construction of the atomic bomb, at speeds similar to Colossus.
Less belligerently, these "giant brains," as they came to be called,
provided unprecedented opportunities for experiments in complexity.
Pioneers like Alan Turing, one of the creators of Colossus, and John
von Neumann, who was involved with the first American machines,
harbored
the hope
that
the
ability
to
think
rationally, our unique
asset
in dealing with
the world, could be captured
in
a machine.
Our minds might be amplified by computers
just
as our muscles
had been amplified by the steam engines of the industrial revolution.
Programs
to reason and
to play
intellectual games
like chess were
designed by Claude Shannon of MIT and by Turing in 1950, but the
earliest computers were too limited and expensive for this use. A few
poor checker-playing programs did appear on
the
first commercial
machines of the early 1950s, and equally poor chess programs showed
up in the
last half of that decade, along with a good checker player
by Arthur Samuel of IBM. Then
in 1957 Allen Newell and Herbert
Simon of Carnegie Tech (now Carnegie Mellon University) and John
Shaw of the RAND Corporation demonstrated the Logic Theorist, the
first program able to reason about arbitrary matters by starting with
axioms and applying rules of inference to prove theorems.
In
1960 John
McCarthy,
then
at
MIT,
coined
the term
artificial
intelligence (AI) for the effort to make computers think.
By 1965 the
first students of McCarthy, Marvin Minsky (also at MIT), Newell, and
Simon had produced AI programs that proved theorems in geometry,
solved problems from intelligence
tests, algebra books, and calculus
exams, and played chess, all with the proficiency of an average college
freshman.
Each program could
handle only one narrow
type
of
problem, but for
first efforts these programs were encouraging—so
encouraging
that most people involved
felt that another decade of
Mind in Motion
progress would surely produce a genuinely intelligent machine. This
was an understandable miscalculation.
Now, a quarter of a century later, computers are thousands of times
more powerful than these sixties models, but they do not seem much
smarter.
Bv 1975 progress in
artificial intelligence had slowed from
the heady sprint of a handful of enthusiasts to the plodding trudge of
growing throngs of workers.
Even so, modest successes have main-
tained flickering hope. So-called expert systems, programs encoding the
decision rules of human experts in narrow domains such as diagnosis
of disease, factory scheduling, or computer system configuration, are
dailv earning their keep in the business world. A fifteen-vear effort at
MIT gathered knowledge about algebra, trigonometry, calculus, and
related fields into a wonderful program called MACSYMA, now mar-
keted commercially, that manipulates svmbolic formulas and helps to
solve otherwise forbidding problems. Several chess-plaving programs
are now officially rated as chess masters, and excellent performance
has been
achieved
in
other games
like backgammon.
There
are
semi-intelligent programs that can understand simplified tvpewritten
English about restricted subjects and make elementary deductions in
the course of answering questions about these texts. Some interpret
spoken commands chosen from thousand-word repertoires, and others
can do simple visual tasks, such as deciding whether a part
is in
its
desired location.
Unfortunately for humanlike robots, computers are at their worst
trying
to do
the
things most
natural
to humans,
such
as
seeing,
hearing, manipulating objects, learning languages, and commonsense
reasoning. This dichotomy—machines doing well things humans find
hard, while doing poorly what
is easy for us—is a giant clue to the
problem of how to construct an intelligent machine.
Machines That See (Dimly) and Grasp (Clumsily)
In the mid-1960s Marvin Minsky's students at MIT began to connect
television cameras and mechanical
robot arms
to
their computers,
giving eyes and hands to artificial minds so that their machines could
see, plan, and
act.
By 1965 these researchers had created a machine
that
could
find and
remove
white
blocks from
a
black
tabletop.
This accomplishment required a controlling program as complex as
any of the then-current pure reasoning programs—programs which.
The Paradox of Robotics
- Computers excel at complex mathematical reasoning but struggle with basic human tasks like seeing and grasping.
- Early robotics experiments at MIT in the 1960s showed that a machine capable of calculus was still outperformed by a toddler in physical tasks.
- The industrial revolution introduced specialized machinery that replaced manual labor but lacked the flexibility to adapt to new tasks.
- George Devol and Joseph Engelberger revolutionized the field by creating the first programmable robot arm, leading to the founding of Unimation.
- The development of robotics has been 'agonizingly slow' compared to the rapid advancement of pure artificial intelligence.
- Industrial robots only began to incorporate advanced sensory systems once the cost of small computers became economically viable.
This dichotomy—machines doing well things humans find hard, while doing poorly what is easy for us—is a giant clue to the problem of how to construct an intelligent machine.
Mind in Motion
progress would surely produce a genuinely intelligent machine. This
was an understandable miscalculation.
Now, a quarter of a century later, computers are thousands of times
more powerful than these sixties models, but they do not seem much
smarter.
Bv 1975 progress in
artificial intelligence had slowed from
the heady sprint of a handful of enthusiasts to the plodding trudge of
growing throngs of workers.
Even so, modest successes have main-
tained flickering hope. So-called expert systems, programs encoding the
decision rules of human experts in narrow domains such as diagnosis
of disease, factory scheduling, or computer system configuration, are
dailv earning their keep in the business world. A fifteen-vear effort at
MIT gathered knowledge about algebra, trigonometry, calculus, and
related fields into a wonderful program called MACSYMA, now mar-
keted commercially, that manipulates svmbolic formulas and helps to
solve otherwise forbidding problems. Several chess-plaving programs
are now officially rated as chess masters, and excellent performance
has been
achieved
in
other games
like backgammon.
There
are
semi-intelligent programs that can understand simplified tvpewritten
English about restricted subjects and make elementary deductions in
the course of answering questions about these texts. Some interpret
spoken commands chosen from thousand-word repertoires, and others
can do simple visual tasks, such as deciding whether a part
is in
its
desired location.
Unfortunately for humanlike robots, computers are at their worst
trying
to do
the
things most
natural
to humans,
such
as
seeing,
hearing, manipulating objects, learning languages, and commonsense
reasoning. This dichotomy—machines doing well things humans find
hard, while doing poorly what
is easy for us—is a giant clue to the
problem of how to construct an intelligent machine.
Machines That See (Dimly) and Grasp (Clumsily)
In the mid-1960s Marvin Minsky's students at MIT began to connect
television cameras and mechanical
robot arms
to
their computers,
giving eyes and hands to artificial minds so that their machines could
see, plan, and
act.
By 1965 these researchers had created a machine
that
could
find and
remove
white
blocks from
a
black
tabletop.
This accomplishment required a controlling program as complex as
any of the then-current pure reasoning programs—programs which.
10
Mind Children
unencumbered by robot appendages, could, for instance, match first-
year
college students
in
solving
calculus problems.
Yet Minsky's
hand-eye system could be bested by
a
toddler.
Nevertheless,
the
experiments continued
at MIT and elsewhere, graduallv developing
into a
field which now goes by the name
robotics, a term coined
in
1942 in a science fiction story by Isaac Asimov from the word
robot,
itself coined by the Czech playwright Karel Capek in 1921.
Robotics
started
far lower on the scale of human performance than
artificial
intelligence, but its progress in the past twentv vears has been just as
agonizingly slow and difficult.
Not all robots, nor all people, idle away their lives in universities.
Many must work for a living. Even before the industrial revolution,
before any
kind
of thought was mechanized,
partially
automatic
machinery, powered by wind
or flowing
water, was put
to work
grinding grain and cutting lumber.
The beginning of the industrial
revolution
in the eighteenth century was marked bv the invention
of a plethora of devices that could substitute
for manual labor in a
precise, and thoroughly inhuman, wav.
Driven by shafts turned by
water or steam, these machines pumped, pounded, cut, spun, wove,
stamped, moved materials and parts, and much else, consistently and
tirelessly.
Once
in
a while something ingeniously
different appeared.
For
instance, the Jacquard loom, invented in 1801, could weave intricate
tapestries
specified by
a
string
of punched
cards.
By
the
early
twentieth century, electronics had given industrial machines limited
senses; they could now stop when something went wrong, or control
the temperature, thickness, even consistency of their workpieces.
Still,
each machine did one job and one job onlv Consequentiv, the product
produced by the machine often became obsolete before the machine
had paid back
its design and construction costs.
This problem had
become particularly acute by the end of World War
II.
In 1954 the inventor George Devol filed a patent for a new kind of
industrial machine, the programmable robot arm, whose task could
be altered simply by changing the stream of punched program cards
that controlled its movement.
In 1958, with Joseph Engelberger, Devol
founded a company named Unimation
(a contraction of "universal"
and
"automation")
to
build
such
machines.
The punched
cards
soon gave way to magnetic memory, which allowed the robot to be
programmed simply by leading
it once by
the hand,
so
to speak.
Mind in Motion
through
its required paces.
The
first industrial robot began work in
a General Motors plant in
1961.
To this day, most large robots that
weld, spray paint, and move pieces of cars are of this type.
Only when the cost of small computers dropped to less than $10,000
did robotics research at the universities begin to influence the design of
industrial robots. The first industrial vision systems, able to locate and
identify parts on conveyor belts, and usually coupled with a new class
of small robot arms, appeared in the late 1970s. Robots able to see and
feel, after a fashion, now play a modest but quietly booming role in
the assembly and inspection of small devices like calculators, printed
circuit boards,
typewriters, and automobile water pumps.
Indeed,
industrial needs have strongly influenced university research. What
was once a negligible number of smart robot projects has swelled to
the hundreds on campuses across the country. And while cybernetics
may now be relatively dormant, its stodgy parent, control theory, has
been quite active since the war in an effort to meet the profitable needs
of the aerospace industry.
Elaborate methods developed
to control
aircraft, spacecraft, and weapons are now influencing the design of
industrial robots.
In 1987
I was treated to a tour of the factory in Fremont, California,
where Apple's Macintosh computers are assembled.
I found most
of the plant well organized but unremarkable. Many assembly steps
were done manually. The most efficient machines were probably those
that inserted components into circuit boards.
Acting something like
sewing machines, these "board stuffers" take components strung on
tapes like machine-gun ammunition and
"stitch" them into printed
circuit boards at blinding speed, several components per second, with
the board sliding rapidly into position for each part, front and back,
left and
right.
The machines are marvels of computerized
control,
and very cost-effective for high-volume production, but they
left me
vaguely disappointed.
In one small niche, however,
I saw a quite
different device inserting components that the high-speed machines
could
not
handle.
The
parts were old-fashioned
inductors—small
metal cans containing a coil of wire. Each can had metal tabs that were
to
fit into slots in the board, and the coils ended in wires intended for
small holes. Unlike the precisely shaped components on the feed tapes
of the other machines, the inductors, supplied neatly arrayed on tex-
tured plastic trays, often had slightly bent tabs and wires that would
simply be mangled by a blind attempt to push them into a board.
11
The Rise of Smart Robots
- The late 1970s saw the emergence of robots equipped with vision and tactile sensors for assembling small electronics.
- Industrial demand and aerospace control theory have significantly accelerated university research into 'smart' robotics.
- Standard high-speed assembly machines operate like 'sewing machines' but are limited to perfectly uniform components.
- Advanced robots use vision programs and adaptive movements to handle irregular parts, such as inductors with bent wires.
- These sophisticated machines can autonomously inspect, straighten, and reject faulty components during the assembly process.
The arm nudged the inductor to and fro while maintaining a slight downward pressure, until the tabs and wires found their holes.
Mind in Motion
through
its required paces.
The
first industrial robot began work in
a General Motors plant in
1961.
To this day, most large robots that
weld, spray paint, and move pieces of cars are of this type.
Only when the cost of small computers dropped to less than $10,000
did robotics research at the universities begin to influence the design of
industrial robots. The first industrial vision systems, able to locate and
identify parts on conveyor belts, and usually coupled with a new class
of small robot arms, appeared in the late 1970s. Robots able to see and
feel, after a fashion, now play a modest but quietly booming role in
the assembly and inspection of small devices like calculators, printed
circuit boards,
typewriters, and automobile water pumps.
Indeed,
industrial needs have strongly influenced university research. What
was once a negligible number of smart robot projects has swelled to
the hundreds on campuses across the country. And while cybernetics
may now be relatively dormant, its stodgy parent, control theory, has
been quite active since the war in an effort to meet the profitable needs
of the aerospace industry.
Elaborate methods developed
to control
aircraft, spacecraft, and weapons are now influencing the design of
industrial robots.
In 1987
I was treated to a tour of the factory in Fremont, California,
where Apple's Macintosh computers are assembled.
I found most
of the plant well organized but unremarkable. Many assembly steps
were done manually. The most efficient machines were probably those
that inserted components into circuit boards.
Acting something like
sewing machines, these "board stuffers" take components strung on
tapes like machine-gun ammunition and
"stitch" them into printed
circuit boards at blinding speed, several components per second, with
the board sliding rapidly into position for each part, front and back,
left and
right.
The machines are marvels of computerized
control,
and very cost-effective for high-volume production, but they
left me
vaguely disappointed.
In one small niche, however,
I saw a quite
different device inserting components that the high-speed machines
could
not
handle.
The
parts were old-fashioned
inductors—small
metal cans containing a coil of wire. Each can had metal tabs that were
to
fit into slots in the board, and the coils ended in wires intended for
small holes. Unlike the precisely shaped components on the feed tapes
of the other machines, the inductors, supplied neatly arrayed on tex-
tured plastic trays, often had slightly bent tabs and wires that would
simply be mangled by a blind attempt to push them into a board.
11
12
Mind Children
The insertion machine worked in a glass booth.
Boards and trays
of inductors arrived and left by conveyor belts. The insertion process
began with a TV camera that looked down on the parts tray. A vision
program located an inductor, and a
fast robot arm swooped to pick
it up and then brought
it, wire and tab end up, in front of a second
TV camera. A second vision program examined the leads and, if they
were straight enough, directed the arm to insert the component in the
board.
If the leads were slightly bent, the inductor was
first pushed
against a "pin straightener,"
a metal block with tapered holes, after
which the pins would be inspected again.
If the leads were hopelessly
mangled, the inductor was dropped into a reject bin and another was
fetched from the tray.
The
insertion was
itself
a
sensitive
process.
The inductor was
rapidly brought to within a few millimeters of the board surface, then
slowly lowered until the robot arm encountered resistance. The arm
nudged the inductor to and fro while maintaining a slight downward
pressure, until the tabs and wires found their holes, at which point
it
applied greater pressure to seat the component. A motorized cutter
mounted below the board then cut and bent the protruding metal,
anchoring the inductor.
If the attempt to seat the part failed after a
few seconds,
it would again be brought in front of the lead-checking
camera, and possibly into the pin straightener, before another insertion
attempt.
If a third attempt failed, the part would be tossed into the
reject bin and a new one tried.
All this happened very rapidly—a part could be inserted every three
or four seconds, though a troublesome one might take up to ten.
I
was impressed—and a
little nostalgic.
The activities had a familiar
feel.
I had been a regular witness to somewhat slower and clumsier
versions of them a decade earlier at the Stanford Artificial Intelligence
Lab, where
I was a graduate student.
In fact, Apple's assembly system
was a product of a small southern California company called Adept
that can trace its ancestry back to PhD theses at SAIL. The seeds cast
there were starting to sprout.
The goal of humanlike performance by stationary robots, though
highly
diluted by
a
myriad
of approaches and
short-term
goals,
has acquired
a
relentless. Darwinian
vigor.
As a
story,
it becomes
bewildering in
its diversity and interrelatedness.
Let us move on to
the sparser world of robots that rove.
The Evolution of Robotics
- The author observes the industrial maturation of robotics at Apple, noting its direct lineage from early academic research at Stanford.
- Early AI programs excelled at abstract logic and games but struggled with the vast amount of data required for real-world reasoning.
- Robotics was initially viewed as a method for machines to autonomously acquire 'world knowledge' that books take for granted.
- Most researchers in the 1970s avoided mobile robots due to the immense logistical difficulty of connecting large computers to moving platforms.
- A divide existed between AI researchers focused on complex reasoning and cyberneticists who preferred simple, animal-like mobile behaviors.
- Shakey, developed in 1969, remains a rare historical example of a mobile robot controlled by high-level reasoning programs.
The seeds cast there were starting to sprout.
12
Mind Children
The insertion machine worked in a glass booth.
Boards and trays
of inductors arrived and left by conveyor belts. The insertion process
began with a TV camera that looked down on the parts tray. A vision
program located an inductor, and a
fast robot arm swooped to pick
it up and then brought
it, wire and tab end up, in front of a second
TV camera. A second vision program examined the leads and, if they
were straight enough, directed the arm to insert the component in the
board.
If the leads were slightly bent, the inductor was
first pushed
against a "pin straightener,"
a metal block with tapered holes, after
which the pins would be inspected again.
If the leads were hopelessly
mangled, the inductor was dropped into a reject bin and another was
fetched from the tray.
The
insertion was
itself
a
sensitive
process.
The inductor was
rapidly brought to within a few millimeters of the board surface, then
slowly lowered until the robot arm encountered resistance. The arm
nudged the inductor to and fro while maintaining a slight downward
pressure, until the tabs and wires found their holes, at which point
it
applied greater pressure to seat the component. A motorized cutter
mounted below the board then cut and bent the protruding metal,
anchoring the inductor.
If the attempt to seat the part failed after a
few seconds,
it would again be brought in front of the lead-checking
camera, and possibly into the pin straightener, before another insertion
attempt.
If a third attempt failed, the part would be tossed into the
reject bin and a new one tried.
All this happened very rapidly—a part could be inserted every three
or four seconds, though a troublesome one might take up to ten.
I
was impressed—and a
little nostalgic.
The activities had a familiar
feel.
I had been a regular witness to somewhat slower and clumsier
versions of them a decade earlier at the Stanford Artificial Intelligence
Lab, where
I was a graduate student.
In fact, Apple's assembly system
was a product of a small southern California company called Adept
that can trace its ancestry back to PhD theses at SAIL. The seeds cast
there were starting to sprout.
The goal of humanlike performance by stationary robots, though
highly
diluted by
a
myriad
of approaches and
short-term
goals,
has acquired
a
relentless. Darwinian
vigor.
As a
story,
it becomes
bewildering in
its diversity and interrelatedness.
Let us move on to
the sparser world of robots that rove.
Mind in Motion
13
Machines That Explore (Haltingly)
The first reasoning programs needed very little data to do their work.
A chessboard, or a problem in
logic, geometry, or algebra, could be
described by a few hundred well-chosen symbols. Similarly, the rules
for solving the problem could be expressed as several hundred
so-
called "transformations" of this data. The difficulty lay only in finding
a sequence of transformations that solved the problem, from among
the astronomical number of possible combinations.
It was obvious that
solving problems in less restricted areas (the question "How can
I get
to Timbuktu?" was an often-used rhetorical example) would require
a much greater initial store of information.
It seemed unlikely that all
the facts needed to solve such problems could be provided manually
to reasoning programs.
Some
facts might be made
available
if
the programs
could be
taught to read and understand books, but comprehending even simple
words would require detailed knowledge of the physical world. Such
knowledge
is assumed to preexist in the minds of book readers—no
book attempts a comprehensive definition of a rock, a tree, the sky, or
a human being. Possibly some of this zuorld knowledge, as
it has come
to be called, could be obtained by the machine itself if it could directly
observe its surroundings through camera eyes, microphone ears, and
feeling robot hands. The desire to automate the acquisition of world
knowledge was one of the early rationales for robotics projects in the
artificial intelligence labs. The internal model of the world that these
computers might develop could then be used by them, and by other
machines, as a basis for commonsense reasoning.
Although a machine that can move around should be able to gather
much more data than an immobile one,
the
logistical
difficulty
of
connecting
a huge immobile computer
to
a
complicated
array
of
sensors on a moving platform made fixed hand-eye systems more
attractive to most researchers.
Besides,
it was soon realized that the
problem of systematically acquiring information from the environment
was much
less
tractable than
the mental
activities
the information
was intended
to
serve.
During
the
1970s dozens
of research
labs
had robot arms connected
to computers, but hardly any had robot
vehicles. Most robotics researchers viewed mobility as an unnecessary
complication to an already overly difficult problem. Their experience
14
Mind Children
was in marked contrast with the attitude of the cyberneticists (and
hundreds of hobbyists and toymakers), who had been quite satisfied
with ehciting simple animal-hke behavior from the modest circuitry
aboard their many small mobile machines.
Stanford Research
Institute's Shakey, completed
in
1969, was the
first, and
is
still the
only, mobile robot
to be controlled
primarily
by programs that reasoned.
It
is an exception that proves the rule.
Shakey's instigators—Nils Nilsson, Charles Rosen, and others—were
inspired by the early success in artificial intelligence research.
They
sought to apply logic-based problem-solving methods to a real-world
task involving a machine that could move and sense its environment.
The problems of controlling this movement and interpreting sensory
data were of secondary importance to the designers, however, whose
main
interest was
in
the machine's
ability
to
reason.
The
job
of
developing the mobility and sensory software was relegated to junior
programmers.
Five feet tall and driven by two slow but precise stepping motors,
Shakey was equipped
with
a
television camera and was
remote-
controlled by a large computer. Methods from MIT's blocks manipu-
lating programs, previously used only with robot arms, were adapted
for interpreting the TV images.
These worked only when the scene
consisted solely of simple, uniformly colored, flat-faced objects, so a
special environment was constructed
for the robot.
It consisted
of
several rooms bounded by clean walls, containing a number of large,
uniformly
painted blocks and wedges.
Shakey's most
impressive
performance, executed piecemeal over a period of days, was to solve a
so-called "monkeys and bananas" problem. Told to push a particular
block that happened to be resting on a larger one, the robot constructed
and acted on a plan that included finding a wedge that could serve as
a ramp, pushing
it against the large block, driving up the ramp, and
delivering the requested push.
The environment and the problem were contrived, but they pro-
vided a motivation, and a
test, for a clever reasoning program called
STRIPS (the STanford Research Institute Problem Solver). Given a task
for the robot, STRIPS assembled a plan out of the limited actions the
robot could
take, each of which had preconditions
(for example,
to
push a block,
it must be in front of me) and probable consequences
(after
I push a block,
it
is moved).
The state of the robot's world
was represented in sentences of mathematical logic, and formulating
The Paradox of Shakey
- Shakey the robot was designed to test logic-based reasoning in a physical environment, though its creators prioritized cognition over sensory-motor skills.
- The robot utilized the STRIPS program to formulate plans by treating actions as logical inferences and the world state as mathematical axioms.
- Despite its conceptual sophistication, Shakey's real-world performance was agonizingly slow, often requiring an hour of processing for a single movement.
- The project revealed a significant disparity between the ease of automating high-level logic and the extreme difficulty of replicating basic biological perception.
- This discrepancy led to the realization that adult-level problem solving is computationally easier for machines than the sensory-motor skills of a one-year-old.
Shakey was impressive in concept but pitiable in action.
14
Mind Children
was in marked contrast with the attitude of the cyberneticists (and
hundreds of hobbyists and toymakers), who had been quite satisfied
with ehciting simple animal-hke behavior from the modest circuitry
aboard their many small mobile machines.
Stanford Research
Institute's Shakey, completed
in
1969, was the
first, and
is
still the
only, mobile robot
to be controlled
primarily
by programs that reasoned.
It
is an exception that proves the rule.
Shakey's instigators—Nils Nilsson, Charles Rosen, and others—were
inspired by the early success in artificial intelligence research.
They
sought to apply logic-based problem-solving methods to a real-world
task involving a machine that could move and sense its environment.
The problems of controlling this movement and interpreting sensory
data were of secondary importance to the designers, however, whose
main
interest was
in
the machine's
ability
to
reason.
The
job
of
developing the mobility and sensory software was relegated to junior
programmers.
Five feet tall and driven by two slow but precise stepping motors,
Shakey was equipped
with
a
television camera and was
remote-
controlled by a large computer. Methods from MIT's blocks manipu-
lating programs, previously used only with robot arms, were adapted
for interpreting the TV images.
These worked only when the scene
consisted solely of simple, uniformly colored, flat-faced objects, so a
special environment was constructed
for the robot.
It consisted
of
several rooms bounded by clean walls, containing a number of large,
uniformly
painted blocks and wedges.
Shakey's most
impressive
performance, executed piecemeal over a period of days, was to solve a
so-called "monkeys and bananas" problem. Told to push a particular
block that happened to be resting on a larger one, the robot constructed
and acted on a plan that included finding a wedge that could serve as
a ramp, pushing
it against the large block, driving up the ramp, and
delivering the requested push.
The environment and the problem were contrived, but they pro-
vided a motivation, and a
test, for a clever reasoning program called
STRIPS (the STanford Research Institute Problem Solver). Given a task
for the robot, STRIPS assembled a plan out of the limited actions the
robot could
take, each of which had preconditions
(for example,
to
push a block,
it must be in front of me) and probable consequences
(after
I push a block,
it
is moved).
The state of the robot's world
was represented in sentences of mathematical logic, and formulating
Mind in Motion
15
a plan was like proving a theorem, the initial state of the world being
the axioms, primitive actions being the rules of inference, and the
desired outcome playing the role of the theorem. One complication
was immediately evident: the outcome of an action is not always what
one expects (as when the block does not budge). Shakey had a limited
ability to handle such glitches by occasionally observing parts of the
world and adjusting its internal description and replanning its actions
if the conditions were not as
it had assumed.
Shakey was impressive in concept but pitiable in action. Each move
of the robot, each glimpse taken by
its camera, consumed about an
hour of computer time and had a high likehhood of failure. The block-
pushing exercise described above was staged, and filmed,
in steps,
with several steps requiring repeated "takes" before they succeeded.
The fault lay not in the STRIPS planner, which produced good plans
when given a good description of what was around the robot, but in
the programs that interpreted the raw data from the sensors and acted
on the recommendations.
It seemed
to me,
in the early 1970s,
that some of the creators of
successful reasoning programs suspected that the poor performance
in the robotics work somehow
reflected
the
intellectual
abilities of
those attracted to that side of the research. Such intellectual snobbery
is not unheard of, for instance between theorists and experimentalists
in physics. But as the number of demonstrations has mounted,
it has
become clear that
it is comparatively easy to make computers exhibit
adult-level performance in solving problems on intelligence tests or
playing checkers, and difficult or impossible to give them the skills of
a one-year-old when
it comes to perception and mobility.
In hindsight, this dichotomy is not surprising. Since the first multi-
celled animals appeared about a billion years ago, survival in the fierce
competition over such limited resources as space, food, or mates has
often been awarded
to the animal that could most quickly produce
a correct action from inconclusive perceptions. Encoded in the large,
highly evolved sensory and motor portions of the human brain
is a
billion years of experience about the nature of the world and how to
survive in
it.
The deliberate process we call reasoning
is,
I believe,
the thinnest veneer of human thought,
effective only because
it
is
supported by
this much
older and much more
powerful,
though
usually unconscious, sensorimotor knowledge. We are all prodigious
olympians in perceptual and motor areas, so good that we make the
The Evolution of Intelligence
- The human brain's sensory and motor systems contain a billion years of evolutionary experience that supports the thin veneer of conscious reasoning.
- Intelligence is intrinsically linked to mobility, as organisms must process inconclusive perceptions quickly to survive and compete for resources.
- Traditional artificial intelligence has struggled by focusing on high-level reasoning while ignoring the massive, unconscious sensorimotor foundation.
- Plants lack intelligence because their immobility removes the evolutionary pressure to develop complex nervous systems for rapid action.
- The author proposes a 'bottom-up' approach to AI that mimics the incremental evolution of animal minds rather than just human logic.
- The vast majority of human thought is unconscious and inaccessible to introspection, making it the most difficult part of intelligence to formalize.
The deliberate process we call reasoning is, I believe, the thinnest veneer of human thought, effective only because it is supported by this much older and much more powerful, though usually unconscious, sensorimotor knowledge.
Mind in Motion
15
a plan was like proving a theorem, the initial state of the world being
the axioms, primitive actions being the rules of inference, and the
desired outcome playing the role of the theorem. One complication
was immediately evident: the outcome of an action is not always what
one expects (as when the block does not budge). Shakey had a limited
ability to handle such glitches by occasionally observing parts of the
world and adjusting its internal description and replanning its actions
if the conditions were not as
it had assumed.
Shakey was impressive in concept but pitiable in action. Each move
of the robot, each glimpse taken by
its camera, consumed about an
hour of computer time and had a high likehhood of failure. The block-
pushing exercise described above was staged, and filmed,
in steps,
with several steps requiring repeated "takes" before they succeeded.
The fault lay not in the STRIPS planner, which produced good plans
when given a good description of what was around the robot, but in
the programs that interpreted the raw data from the sensors and acted
on the recommendations.
It seemed
to me,
in the early 1970s,
that some of the creators of
successful reasoning programs suspected that the poor performance
in the robotics work somehow
reflected
the
intellectual
abilities of
those attracted to that side of the research. Such intellectual snobbery
is not unheard of, for instance between theorists and experimentalists
in physics. But as the number of demonstrations has mounted,
it has
become clear that
it is comparatively easy to make computers exhibit
adult-level performance in solving problems on intelligence tests or
playing checkers, and difficult or impossible to give them the skills of
a one-year-old when
it comes to perception and mobility.
In hindsight, this dichotomy is not surprising. Since the first multi-
celled animals appeared about a billion years ago, survival in the fierce
competition over such limited resources as space, food, or mates has
often been awarded
to the animal that could most quickly produce
a correct action from inconclusive perceptions. Encoded in the large,
highly evolved sensory and motor portions of the human brain
is a
billion years of experience about the nature of the world and how to
survive in
it.
The deliberate process we call reasoning
is,
I believe,
the thinnest veneer of human thought,
effective only because
it
is
supported by
this much
older and much more
powerful,
though
usually unconscious, sensorimotor knowledge. We are all prodigious
olympians in perceptual and motor areas, so good that we make the
16
Mind Children
difficult look easy.
Abstract thought, though,
is a new trick, perhaps
less than 100 thousand years old. We have not yet mastered
it.
It
is
not all that intrinsically difficult;
it just seems so when we do
it.
Organisms that lack the ability to perceive and explore their environ-
ment do not seem to acquire anything that we would call intelligence.
We need make only the grossest comparison of the plant and animal
kingdoms to appreciate the fact that mobile organisms tend to evolve
the mental characteristics we associate with intelligence, while immo-
bile ones do not. Plants are awesomely effective in their own right, but
they have no apparent inclinations toward intelligence. Perhaps, given
much more time, an intelligent plant could evolve—some carniverous
and "sensitive" plants show that something akin to nervous action is
possible—but the
life expectancy of the universe may be insufficient
time.
The cybernetics researchers, whose self-contained experiments were
often animal-like and
mobile, began
their investigation of nervous
systems by attempting to duplicate the sensorimotor abilities of ani-
mals. The artificial intelligence community ignored
this approach in
their early work and instead set their sights directly on the intellectual
acme of human thought, in experiments running on large, stationary
mainframe computers dedicated to mechanizing pure reasoning. This
"top-down"
route
to machine
intelligence made impressive
strides
at
first but has produced disappointingly few fundamental gains in
over
a decade.
While cybernetics scratched
the underside of
real
intelligence,
artificial intelligence scratched the topside. The interior
bulk of the problem remains inviolate.
All
attempts
to
achieve
intelligence
in
machines have
imitated
natural
intelligence,
but
the
different
approaches
have mimicked
different
aspects
of
the
original.
Traditional
artificial
intelHgence
attempts
to copy the conscious mental processes of human beings
doing particular tasks.
Its limitation is that the most powerful aspects
of thought are unconscious, inaccessible to mental introspection, and
thus
difficult
to
set down
formally.
Some
of
the
cyberneticists,
taking a
different
tack, had focused on building models of animal
nervous systems
at
the neural
level.
This approach
is
limited by
the astronomical number of
cells
in
large nervous systems and by
the great difficulty of determining exactly what individual neurons
do, how they are interconnected, and what nerve networks do. Both
traditional AT and neural modeling have contributed insights to the
Mind
ill Motion
17
enterprise, and no doubt each could solve the whole problem, given
enough time. But with the present state of the art,
1 feel that the fastest
progress can be made by imitating the ezvlution of animal minds, by
striving to add capabilities to machines a few at a time, so that the
resulting sequence of machine behaviors resembles the capabilities of
animals with increasingly complex nervous systems. A key feature
of this approach
is that the complexitv of these incremental advances
can be tailored to make best use of the problem-solving abilities of the
human researchers and the computers involved. Our intelligence, as
a tool, should allow us to follow the path to intelligence, as a goal, in
bigger strides than those originally taken bv the awesomely patient,
but blind, processes of Darwinian evolution.
The route is from the bottom up, and the first problems are those of
perception and mobility, because
it
is on
this sensorimotor bedrock
that human
intelligence developed.
Programs which
tackle
incre-
mental problems similar to those that faced early animals—how to
deal
with, and even
to
anticipate,
the sudden
surprises,
dangers,
and opportunities encountered bv an exploring organism—are being
written and
tested
in robots that have to face the uncertainties of a
real world.
Most approaches
will
fail, but
a few
will succeed,
in
much the same wav that a tiny fraction of the spontaneous mutations
that appear in organisms survive into the next generation.
Survival
depends on the advantages a new technique offers
in coping with
the challenges of a complex and dynamic environment. By setting up
experimental conditions analogous to those encountered by animals in
the course of evolution, we hope to retrace the steps by which human
intelligence evolved. That animals started with small nervous systems
gives confidence that today's small computers can emulate the
first
steps toward humanlike performance. Where possible, our efforts to
simulate intelligence from the bottom up will be helped by biological
peeks at the "back of the book"—at the neuronal, morphological, and
behavioral features of animals and humans, as revealed bv the people
who study those aspects of life.
The modern robotics effort is just twenty years old, and for only the
last ten of those have computers been routinely available to control
robots.
The recapitulation of the evolution of intelligent
life
is at a
very early stage— robotic equivalents of nervous systems
exist, but
they are comparable in complexity to the nervous systems of worms.
Nevertheless, the evolutionary pressures that shaped
life are already
Bottom-Up Intelligence Evolution
- Researchers aim to retrace the steps of human evolution by building intelligence from the bottom up.
- The primary focus is on sensorimotor bedrock, emphasizing perception and mobility as the foundation of cognition.
- Robots are being tested in real-world environments to simulate the survival pressures and spontaneous mutations of Darwinian processes.
- Small computers are currently capable of emulating the simple nervous systems of early organisms like worms.
- The goal is to use human intelligence as a tool to accelerate the path toward artificial intelligence faster than blind evolution.
- Biological insights into animal morphology and behavior serve as a 'back of the book' guide for robotic development.
Our intelligence, as a tool, should allow us to follow the path to intelligence, as a goal, in bigger strides than those originally taken by the awesomely patient, but blind, processes of Darwinian evolution.
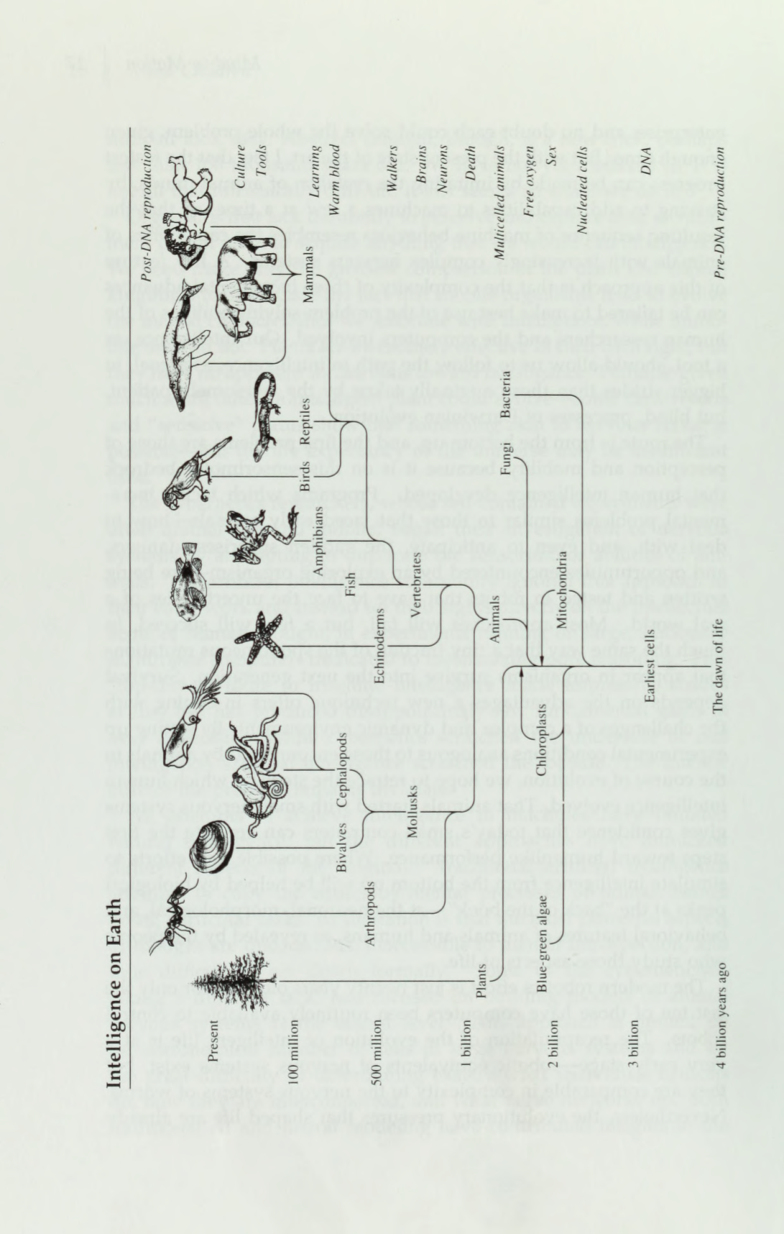
Mind
ill Motion
17
enterprise, and no doubt each could solve the whole problem, given
enough time. But with the present state of the art,
1 feel that the fastest
progress can be made by imitating the ezvlution of animal minds, by
striving to add capabilities to machines a few at a time, so that the
resulting sequence of machine behaviors resembles the capabilities of
animals with increasingly complex nervous systems. A key feature
of this approach
is that the complexitv of these incremental advances
can be tailored to make best use of the problem-solving abilities of the
human researchers and the computers involved. Our intelligence, as
a tool, should allow us to follow the path to intelligence, as a goal, in
bigger strides than those originally taken bv the awesomely patient,
but blind, processes of Darwinian evolution.
The route is from the bottom up, and the first problems are those of
perception and mobility, because
it
is on
this sensorimotor bedrock
that human
intelligence developed.
Programs which
tackle
incre-
mental problems similar to those that faced early animals—how to
deal
with, and even
to
anticipate,
the sudden
surprises,
dangers,
and opportunities encountered bv an exploring organism—are being
written and
tested
in robots that have to face the uncertainties of a
real world.
Most approaches
will
fail, but
a few
will succeed,
in
much the same wav that a tiny fraction of the spontaneous mutations
that appear in organisms survive into the next generation.
Survival
depends on the advantages a new technique offers
in coping with
the challenges of a complex and dynamic environment. By setting up
experimental conditions analogous to those encountered by animals in
the course of evolution, we hope to retrace the steps by which human
intelligence evolved. That animals started with small nervous systems
gives confidence that today's small computers can emulate the
first
steps toward humanlike performance. Where possible, our efforts to
simulate intelligence from the bottom up will be helped by biological
peeks at the "back of the book"—at the neuronal, morphological, and
behavioral features of animals and humans, as revealed bv the people
who study those aspects of life.
The modern robotics effort is just twenty years old, and for only the
last ten of those have computers been routinely available to control
robots.
The recapitulation of the evolution of intelligent
life
is at a
very early stage— robotic equivalents of nervous systems
exist, but
they are comparable in complexity to the nervous systems of worms.
Nevertheless, the evolutionary pressures that shaped
life are already
U
co
^rf
i/i
(C j:
s: a
m
01
01 -o
X —
tC
-5
2
>
-
P
>
=
^
>-
^ 5
'^
,- ^
o 6
<z
XJ
^
5
01
i/i
a.
c
v£i
0/
IS
>
ra
u
e
>^
3
O
ra
£ jr
O
1/5
.2 3 d jf
'x m
X
Ol
'^
o
c
ra
^
<z>
01 2
t/i
t
"r"
S£
ac
C
c
^
Si S S ~
Ki <=
3 c
s:.
ifi T3
^
S C c
'X
3 ^
Oi XI
~
c
oi
w _
01 -
^
'-'
c
SP
7=
«:
"^ ^
£
?
E ^^.S
= -o ^'
•S
a.'^
^
^
c
S
'^ -^
X .3
;=
3
tc ^
£ rSX
C
X
^ g X
Ml ^
~
2i ^ ^
S -5 -c
X
T3
'
£-^
u
X
't; —
—
f3!:~""
— -px
^ E >-^
S! t
c
ra
>.£
S
E
o' .£
^
c 5
111
'5
73
3 ,- 3
ii
-
x: ^
^
01
a. 73
X i
oc
0* C
c
0*
c
i
X
"^ =
u^
>
rz g-S XI
k-
oX ^
i o,^
01 ^
u co £
>
re
c
cj c '^ •-
&--^ c
a.
re
E e c ^o 73c
re ^
'x
o
o 3
oT o
_o
>
c
o
-^
o
(Z
X
C
3
77^
re
x:
T3C
T
X
0) 3 "
O J=
1
£X
ra ^
c >;E
>, 3
XI
tc
'X,
c
0*
c
u
re
~
X
D-
n:
oi
re
x:
_
re
o. £ x:
*J
C
01
,
f3
C ^
Oi
oi ^ X X
Xi
.
X
ji;
^£30
^
o
c Ji
-
S
c
E
re O- c C
01
3
oj
X
U
> X ._
2 ^'1
>
'i>
^
73 .£
C J=
C
tJ
>s'X!
5 -r
X O
;ii
^ X
::f-
^ oi H
5 £
C^
re
^
>, X
o
>
X
X
re —
o
"x: 73
o 73
-p "x
^-
re
tC
f,
^ J2 c 5
Q.
re
0.3
>^73
J-
~
E
re
ere
^
re 73
73 X
^ X
-"
-t:
X X
c
•— T
" " X
•- Xi
O) 73
-
tC X
H
-; £
re
. ^
>
^
C
c
Q
?.
£
3^
^;^ £
XX
-7-
£
'^ £x
Ml
5 C
X
6C
'^ ^
X a."
re
X
o
re
>
o
I-
5
o teg-
3 •—
re
X — ^
^
C
3
-0 .S -
5i
"^
c
-,
tc—
^
X
\ 3
01
- O 73 >
_
c
re
£
re X
X
5
X
re
"^
C
u
01
-p
3
c ~
re
I^
re
-r- O "^
.;^
>^
£
5;
01
re
-"
X
i-H
X
01
X £
1- o
X XH
:S ii
5
^
S.
re
o •- •-
a; o C
—
r-
>-
01
aj
i-
X —
01
X X
D.
5
c en
ii
iC'
re
re J=
p
—
>. O.
>^
i^
P
i:
£
>
3
O X C3 U C
C X
<^. C
X
£-
-^ O _
^
O
C £
"",
'2 ^
jr
2 " 73
01
X
^ S
3
o
>
_re
O)
X ~ X
b;
re
>.-S
£
^- r ^ 5
^- £ —
•§, ^ ^'^
S £
X
:;:
> i^i
X
re
^
j;
r-
01
5 -o
>
73 C
£ 12
><,
5
re
£
X
£
d
^
.-^
re
o .=
;^
;?;
..-
^-
j:
-rr
_;
_
73
f^
.s: X
S^
<->
>-
ifi X •£
5
X
^ ?
J-
X
—
._
o
-^
X
tc-"
X
5
>.
"P
ii^
- 5
3
•£ -c
o
X
o X
3 D.^
P ^ ^
-I
>
X
cc
;L T5 ^-
t?;
C
o
C —
O
C X
re
;i
-C
£ -
^- -
f=
X
re
re
^ -^
t. —
73
'd
3
a.
6C
re
bCx
3X
re
X
.'£• %
c
re
01
6C c
SO
^
^ ^
p
> > " £
re -^ -2
^ H f^x 3
>>— "
Sc-^a;£-aga;c
re^o'S
^
-T"
—
D
£•2
— 'i — £ •£
•^
3 §-x
re
X
£
^
S E
X
c
^,
01
r
tie
iri
73
'*"
3
O)
C
£
x:
^
3
^ 2
=
re X
°
"
-
01 o
-1 3
.t; -
?
i: o-x
01
-J
•?-
ii =
&. 5
" ^
"3
X
- 3
,- o
re
^ §
^X""^?--3^re
C >,re73-^:t:- E
I
o
>
•-
x:
-' c£
c
a
£f >^2 •-§£-
.i:
3 X
^ ^
X
re
£
o .£
'.
^ i=
^ 3
s
2Px
3
>
,j^
X ^ tc
0>
., ^ ^
o
re
5 -T
'£
re -P
3 X i
X ^^
X.
c
o
- X
-r
/'
a. o
-
o
>
S c
ii-"
- X
c c
3 5 3 ^
COO.'
? P
o "^
S
O 3 ^ •-
r
§73
X
£:
=
''
*
01
re
a^ ^
5
:3 X
re
,73 •£
'
b ^ 3
01
-5
O
3 O
6C
5"^ '^ ^^-
re o X
73 --2^-0
5 jc
'-^
aj
re
C .2pT3 :3 ^
" r^
X
re
5PC
2 Ef
3
"3
a^
>
3 ^
£
re
^ X
" —
"^
re
^
r £
-»2 x
£
-
^ X
^
-i.
X
:i. ^
i> — 3:
>, 5
o
3-.
3
TV
'r^ ~
S
I
^•
re
•^£
>. i 3 £
;=
h
=5 -£ - ^ o 1 .£
X -3
o
;i :^ £ ^ 73
-= p 'p ^
3 i
£ >
re X
— X
re
o
£ £
re
D. 3
X
a;
X
>
^€X
Oi
-J .=
X
^
?2
^ X
3 C -
C
'^
re
5 1 5
= - g
-
-
£;5a.6C-rQ.>-
c
'-' ^ ^
7
£ 75
3
r= X -^
i2 ^ :^ E -^
u^
< X o
re
a..£
o ^
o X
X
jf-
a;
3
re ^
,,
„
,^ — 73
b;
X
3
^.::
'>, 0773^?
0-3i£'3D.
3c
X Scl "2 £ ^ £
!=
X
reac5<reM)£a^
7^
X
t o
ti ^ .3
01
o
re
^
E
Qj X c
re
re
^
C X
P
I 3
5cii c s-e
^
re
a. X
c
^^,^33
X
i -3 X —
3 x: ?>; £r
re —
Oi
'^,
OC
5
o ^ ^ ;3
X
=
3 ^^
DCX-^
g
S
.£ ^
X ^
£
''^—
c
^
2
. ^- X
iJ
iri
X
5 "
.3 o •-
^
P^^ X
re
><
.
.3^3
. >
_-,
o
re
i^ X
,x
;^ -
&D
^
£
5 X X
TO
E
^
£
re
.£
> X
M
"5
a;
>-
73
a; 3 ^ J2
si;
re ^ O
in
3
;
>
-^
"5
2
o I
O ^^
X •- C
3
-- 1 §
ri ^
X
c. — ^ ^
!^ u =
_ 3
3 T
C
£ «
3:£
^ 35
^
" X
X 73
>^ 3 13
5C 3 XI
a. o
X
£
X
3 X
'^
re -O
x c
_3 3
1
£
re
'•
.£
II
X
_3
3 X
X E
re
<*-
0,0
01
0-
3
^J. rex ir>x
I,
S
re
2 5 O
^ ^
re
c
X
a^ X
<^
. £
Oi
>,^*; r3
60 3
0, ^
CoiOHrexure
The Robotics Golden Spike
- The author identifies a palpable tension in robotics between the 'top-down' approach of reasoning programs and the 'bottom-up' approach of physical competence.
- A 'golden spike' metaphor is used to describe the future union of these two methodologies, which will result in fully intelligent machines.
- Reasoning programs currently lack the real-world competence and commonsense knowledge that physical robotics models can provide.
- A unified machine would be able to visualize plans and intuit solutions by observing them in a world model, mimicking human cognition.
- The author predicts this technological union will occur approximately forty years from the time of writing.
- The robot 'Shakey' is cited as a failed example of this union, as it prioritized top-down reasoning over natural physical interaction.
Fully intelligent machines will result when the metaphorical golden spike is driven uniting the two efforts.
^rf
i/i
(C j:
s: a
m
01
01 -o
X —
tC
-5
2
>
-
P
>
=
^
>-
^ 5
'^
,- ^
o 6
<z
XJ
^
5
01
i/i
a.
c
v£i
0/
IS
>
ra
u
e
>^
3
O
ra
£ jr
O
1/5
.2 3 d jf
'x m
X
Ol
'^
o
c
ra
^
<z>
01 2
t/i
t
"r"
S£
ac
C
c
^
Si S S ~
Ki <=
3 c
s:.
ifi T3
^
S C c
'X
3 ^
Oi XI
~
c
oi
w _
01 -
^
'-'
c
SP
7=
«:
"^ ^
£
?
E ^^.S
= -o ^'
•S
a.'^
^
^
c
S
'^ -^
X .3
;=
3
tc ^
£ rSX
C
X
^ g X
Ml ^
~
2i ^ ^
S -5 -c
X
T3
'
£-^
u
X
't; —
—
f3!:~""
— -px
^ E >-^
S! t
c
ra
>.£
S
E
o' .£
^
c 5
111
'5
73
3 ,- 3
ii
-
x: ^
^
01
a. 73
X i
oc
0* C
c
0*
c
i
X
"^ =
u^
>
rz g-S XI
k-
oX ^
i o,^
01 ^
u co £
>
re
c
cj c '^ •-
&--^ c
a.
re
E e c ^o 73c
re ^
'x
o
o 3
oT o
_o
>
c
o
-^
o
(Z
X
C
3
77^
re
x:
T3C
T
X
0) 3 "
O J=
1
£X
ra ^
c >;E
>, 3
XI
tc
'X,
c
0*
c
u
re
~
X
D-
n:
oi
re
x:
_
re
o. £ x:
*J
C
01
,
f3
C ^
Oi
oi ^ X X
Xi
.
X
ji;
^£30
^
o
c Ji
-
S
c
E
re O- c C
01
3
oj
X
U
> X ._
2 ^'1
>
'i>
^
73 .£
C J=
C
tJ
>s'X!
5 -r
X O
;ii
^ X
::f-
^ oi H
5 £
C^
re
^
>, X
o
>
X
X
re —
o
"x: 73
o 73
-p "x
^-
re
tC
f,
^ J2 c 5
Q.
re
0.3
>^73
J-
~
E
re
ere
^
re 73
73 X
^ X
-"
-t:
X X
c
•— T
" " X
•- Xi
O) 73
-
tC X
H
-; £
re
. ^
>
^
C
c
Q
?.
£
3^
^;^ £
XX
-7-
£
'^ £x
Ml
5 C
X
6C
'^ ^
X a."
re
X
o
re
>
o
I-
5
o teg-
3 •—
re
X — ^
^
C
3
-0 .S -
5i
"^
c
-,
tc—
^
X
\ 3
01
- O 73 >
_
c
re
£
re X
X
5
X
re
"^
C
u
01
-p
3
c ~
re
I^
re
-r- O "^
.;^
>^
£
5;
01
re
-"
X
i-H
X
01
X £
1- o
X XH
:S ii
5
^
S.
re
o •- •-
a; o C
—
r-
>-
01
aj
i-
X —
01
X X
D.
5
c en
ii
iC'
re
re J=
p
—
>. O.
>^
i^
P
i:
£
>
3
O X C3 U C
C X
<^. C
X
£-
-^ O _
^
O
C £
"",
'2 ^
jr
2 " 73
01
X
^ S
3
o
>
_re
O)
X ~ X
b;
re
>.-S
£
^- r ^ 5
^- £ —
•§, ^ ^'^
S £
X
:;:
> i^i
X
re
^
j;
r-
01
5 -o
>
73 C
£ 12
><,
5
re
£
X
£
d
^
.-^
re
o .=
;^
;?;
..-
^-
j:
-rr
_;
_
73
f^
.s: X
S^
<->
>-
ifi X •£
5
X
^ ?
J-
X
—
._
o
-^
X
tc-"
X
5
>.
"P
ii^
- 5
3
•£ -c
o
X
o X
3 D.^
P ^ ^
-I
>
X
cc
;L T5 ^-
t?;
C
o
C —
O
C X
re
;i
-C
£ -
^- -
f=
X
re
re
^ -^
t. —
73
'd
3
a.
6C
re
bCx
3X
re
X
.'£• %
c
re
01
6C c
SO
^
^ ^
p
> > " £
re -^ -2
^ H f^x 3
>>— "
Sc-^a;£-aga;c
re^o'S
^
-T"
—
D
£•2
— 'i — £ •£
•^
3 §-x
re
X
£
^
S E
X
c
^,
01
r
tie
iri
73
'*"
3
O)
C
£
x:
^
3
^ 2
=
re X
°
"
-
01 o
-1 3
.t; -
?
i: o-x
01
-J
•?-
ii =
&. 5
" ^
"3
X
- 3
,- o
re
^ §
^X""^?--3^re
C >,re73-^:t:- E
I
o
>
•-
x:
-' c£
c
a
£f >^2 •-§£-
.i:
3 X
^ ^
X
re
£
o .£
'.
^ i=
^ 3
s
2Px
3
>
,j^
X ^ tc
0>
., ^ ^
o
re
5 -T
'£
re -P
3 X i
X ^^
X.
c
o
- X
-r
/'
a. o
-
o
>
S c
ii-"
- X
c c
3 5 3 ^
COO.'
? P
o "^
S
O 3 ^ •-
r
§73
X
£:
=
''
*
01
re
a^ ^
5
:3 X
re
,73 •£
'
b ^ 3
01
-5
O
3 O
6C
5"^ '^ ^^-
re o X
73 --2^-0
5 jc
'-^
aj
re
C .2pT3 :3 ^
" r^
X
re
5PC
2 Ef
3
"3
a^
>
3 ^
£
re
^ X
" —
"^
re
^
r £
-»2 x
£
-
^ X
^
-i.
X
:i. ^
i> — 3:
>, 5
o
3-.
3
TV
'r^ ~
S
I
^•
re
•^£
>. i 3 £
;=
h
=5 -£ - ^ o 1 .£
X -3
o
;i :^ £ ^ 73
-= p 'p ^
3 i
£ >
re X
— X
re
o
£ £
re
D. 3
X
a;
X
>
^€X
Oi
-J .=
X
^
?2
^ X
3 C -
C
'^
re
5 1 5
= - g
-
-
£;5a.6C-rQ.>-
c
'-' ^ ^
7
£ 75
3
r= X -^
i2 ^ :^ E -^
u^
< X o
re
a..£
o ^
o X
X
jf-
a;
3
re ^
,,
„
,^ — 73
b;
X
3
^.::
'>, 0773^?
0-3i£'3D.
3c
X Scl "2 £ ^ £
!=
X
reac5<reM)£a^
7^
X
t o
ti ^ .3
01
o
re
^
E
Qj X c
re
re
^
C X
P
I 3
5cii c s-e
^
re
a. X
c
^^,^33
X
i -3 X —
3 x: ?>; £r
re —
Oi
'^,
OC
5
o ^ ^ ;3
X
=
3 ^^
DCX-^
g
S
.£ ^
X ^
£
''^—
c
^
2
. ^- X
iJ
iri
X
5 "
.3 o •-
^
P^^ X
re
><
.
.3^3
. >
_-,
o
re
i^ X
,x
;^ -
&D
^
£
5 X X
TO
E
^
£
re
.£
> X
M
"5
a;
>-
73
a; 3 ^ J2
si;
re ^ O
in
3
;
>
-^
"5
2
o I
O ^^
X •- C
3
-- 1 §
ri ^
X
c. — ^ ^
!^ u =
_ 3
3 T
C
£ «
3:£
^ 35
^
" X
X 73
>^ 3 13
5C 3 XI
a. o
X
£
X
3 X
'^
re -O
x c
_3 3
1
£
re
'•
.£
II
X
_3
3 X
X E
re
<*-
0,0
01
0-
3
^J. rex ir>x
I,
S
re
2 5 O
^ ^
re
c
X
a^ X
<^
. £
Oi
>,^*; r3
60 3
0, ^
CoiOHrexure
20
Mind Children
palpable
in
the
robotics
lab, and
I am confident
that
this bottom-
up route
to
artificial intelligence
will one day meet the
traditional
top-down
route more
than
half
way,
ready
to
provide
the
real-
world competence and the commonsense knowledge that has been so
frustratingly elusive in reasoning programs. Fully intelligent machines
will result when the metaphorical golden spike
is driven uniting the
two efforts. A reasoning program backed by a robotics world model
will be able to visualize the steps in its plan, to distinguish reasonable
situations from absurd ones, and to intuit some solutions by observing
them happen in its model, just as humans do. Later
I will explain why
1 expect to see this union in about forty years. For the moment, let us
explore some of the artificial fauna at the bottom.
As we have seen, Shakey was not one of them. This robot was an
expression of the top-down effort:
its specialty was reasoning, while
its rudimentary vision and motion software worked only in starkly
simple surroundings.
At about the same time, though, on a much
lower budget,
a mobile robot
that was
to specialize
in seeing and
moving in natural settings was born at Stanford University's Artificial
Intelligence
Project,
located about eight miles away from Shakey's
residence
at SRI. John McCarthy founded
the Project
in 1963 with
the then-plausible goal of building
a
fully
intelligent machine
in a
decade. (The Project was renamed the Stanford Artificial Intelligence
Laboratory,
or SAIL,
as
the decade drew nigh and
plausibihty
of
the Project drifted away.)
Reflecting the priorities of early
artificial
intelligence research, McCarthy worked on reasoning and delegated
to
others
the design
of
ears,
eyes, and hands
for
the
anticipated
artificial mind. SAIL's hand-eye group soon overtook the MIT robotics
group and was seminal
in the
later boom
in smart robot arms
for
industrial uses. A modest investment in mobility was added when
Les Earnest, SAIL's technically astute chief administrator, learned of a
vehicle abandoned by Stanford's mechanical engineering department
after a short
stint as a simulated remote-controlled lunar rover.
At
SAIL
it became the Stanford Cart, the first mobile robot controlled by
a large computer that did not reason, and the first testbed for computer
vision in the cluttered, haphazardly illuminated world most animals
inhabit. The progeny of two PhD theses (one of them my own), the
Stanford Cart slowly navigated raw indoor and outdoor spaces guided
by TV images processed by programs quite different from those in
Shakey's world.
The Evolution of Mobile Robotics
- John McCarthy founded SAIL in 1963 with the ambitious but ultimately unmet goal of creating a fully intelligent machine within ten years.
- The Stanford Cart emerged as a pioneering testbed for computer vision, navigating real-world environments rather than the simplified 'blocks world' of its predecessors.
- NASA's mid-1970s Mars mission plans spurred the development of autonomous navigation to overcome the forty-minute radio delay between Earth and Mars.
- JPL's Robotics Research Vehicle (RRV) demonstrated early success in rock manipulation before the 1984 Mars mission was canceled due to budget cuts.
- DARPA became a primary driver of robotics in the 1980s, funding autonomous overland vehicles to prevent technological surprises and navigate hazardous war zones.
- The shift from fixed industrial arms to mobile robots addressed the logistical challenge of delivering tasks to machines in factory settings.
The Project was renamed the Stanford Artificial Intelligence Laboratory, or SAIL, as the decade drew nigh and plausibility of the Project drifted away.
20
Mind Children
palpable
in
the
robotics
lab, and
I am confident
that
this bottom-
up route
to
artificial intelligence
will one day meet the
traditional
top-down
route more
than
half
way,
ready
to
provide
the
real-
world competence and the commonsense knowledge that has been so
frustratingly elusive in reasoning programs. Fully intelligent machines
will result when the metaphorical golden spike
is driven uniting the
two efforts. A reasoning program backed by a robotics world model
will be able to visualize the steps in its plan, to distinguish reasonable
situations from absurd ones, and to intuit some solutions by observing
them happen in its model, just as humans do. Later
I will explain why
1 expect to see this union in about forty years. For the moment, let us
explore some of the artificial fauna at the bottom.
As we have seen, Shakey was not one of them. This robot was an
expression of the top-down effort:
its specialty was reasoning, while
its rudimentary vision and motion software worked only in starkly
simple surroundings.
At about the same time, though, on a much
lower budget,
a mobile robot
that was
to specialize
in seeing and
moving in natural settings was born at Stanford University's Artificial
Intelligence
Project,
located about eight miles away from Shakey's
residence
at SRI. John McCarthy founded
the Project
in 1963 with
the then-plausible goal of building
a
fully
intelligent machine
in a
decade. (The Project was renamed the Stanford Artificial Intelligence
Laboratory,
or SAIL,
as
the decade drew nigh and
plausibihty
of
the Project drifted away.)
Reflecting the priorities of early
artificial
intelligence research, McCarthy worked on reasoning and delegated
to
others
the design
of
ears,
eyes, and hands
for
the
anticipated
artificial mind. SAIL's hand-eye group soon overtook the MIT robotics
group and was seminal
in the
later boom
in smart robot arms
for
industrial uses. A modest investment in mobility was added when
Les Earnest, SAIL's technically astute chief administrator, learned of a
vehicle abandoned by Stanford's mechanical engineering department
after a short
stint as a simulated remote-controlled lunar rover.
At
SAIL
it became the Stanford Cart, the first mobile robot controlled by
a large computer that did not reason, and the first testbed for computer
vision in the cluttered, haphazardly illuminated world most animals
inhabit. The progeny of two PhD theses (one of them my own), the
Stanford Cart slowly navigated raw indoor and outdoor spaces guided
by TV images processed by programs quite different from those in
Shakey's world.
Mind in Motion
21
In the mid-1970s NASA began planning for a robot mission to Mars,
to follow the successful Viking landings.
Scheduled
for launch
in
1984,
it was
to include two vehicles
that would
rove the Martian
surface.
Mars
is so
far away, even by
radio,
that simple remote
control would be either very slow or very risky; the delay between
sending
a command and seeing
its consequence can be as long as
forty minutes.
If the robot could
travel safely on
its own much of
the time,
it would be able to cover much more terrain. Toward this
end, Caltech's Jet Propulsion Laboratory
(JPL), designer of most of
NASA's robot spacecraft, which until then used quite safe and simple
automation, initiated an intelligent robotics project.
Pulling together
methods, hardware, and people from university robotics programs,
it built a
large, wheeled
test platform called the Robotics Research
Vehicle, or RRV, a contraption that carried cameras, a laser rangefinder,
a robot arm, and a full electronics rack, all connected by a long cable
to a big computer. By 1977
it could struggle through short stretches
of a rock-littered parking lot to pick up a certain rock and rotate
it for
the cameras.
But in 1978 the project was halted when the Mars 1984
mission was canceled and removed from NASA's budget. (Of course.
Mars has not gone away, and JPL
is considering a
visit there at the
end of the millennium.)
Along with the Office of Naval Research,
the
first and
steadiest
supporter of
artificial
intelligence research (and
a major reason
all
the early advances in the field happened in the United States)
is the
Department of Defense's Advanced Research Project Agency (DARPA).
Founded in 1958 after the national humiliation caused by Sputnik, its
purpose was to fund far-out projects as insurance against unwelcome
technological
surprises.
In
1981 managers
in DARPA decided
that
robot navigation was sufficiently advanced to warrant a major effort to
develop autonomous vehicles able to travel large distances overland
without a human operator, perhaps into war zones or other hazardous
areas.
The number of mobile robot projects jumped dizzyingly,
in
universities and
at defense contractors,
as funding
for
this
project
materialized. Even now, several new truck-size robots are negotiating
test roads around the country—and the dust is still settling.
On
a more workaday
level,
it
is
not
a
trivial matter
that
fixed
robot arms
in
factories must have
their
tasks
delivered
to
them.
An assembly-line conveyor
belt
is one
solution,
but managers
of
increasingly automated
factories
in
the
late
1970s and
early
1980s
The Evolution of Mobile Robotics
- Early industrial automation was limited by rigid material flow routes, leading to the development of wire-guided Automatically Guided Vehicles (AGVs).
- The field of robotics has become a 'witch's brew' of diverse disciplines, including biology, physics, and art, though it suffers from a lack of unified direction.
- While manufacturing and agriculture have been successfully automated, domestic service remains a costly and unfulfilled human need.
- The transition from factory to home environments is difficult because households are chaotic, resource-limited, and require higher safety standards.
- Despite the historical gap between robot cost and performance, the author predicts the emergence of general-purpose home robots by the new millennium.
The reality is a witch's brew of approaches, motivations, and, as yet, unconnected problems.
22
Mind Children
found belts, whose routes are difficult to change, too restrictive. Their
robots could be
rapidly reprogrammed
for
different
jobs,
but
the
material flow routes could not.
Several large companies worldwide
dealt with the problem by building what they called Automatically
Guided Vehicles (AGVs) that navigated by sensing signals transmitted
by wires buried along
their
route.
Looking
like
forklifts or large
bumper cars, they can be programmed to travel from place to place
and be loaded and unloaded by robot arms.
Some recent variants
carry
their own robotic arms.
Burying the route wires
in concrete
factory floors is expensive, and alternative methods of navigation are
being sought. As with robot arms, the academic and industrial efforts
to develop mobile robots have merged, and a mind-boggling number
of directions and ideas are being energetically pursued.
A Robot for the Masses
The history presented so
far
is highly sanitized and describes only
a few major actors
in
the new
field
of
robotics.
The
reality
is
a
witch's brew of approaches, motivations, and, as
yet, unconnected
problems. The practitioners are large and small groups of electrical,
mechanical,
optical,
and
all
other
kinds
of
engineers,
physicists,
mathematicians, biologists, chemists, medical technologists, computer
scientists,
artists, and
inventors,
all around
the world.
Computer
scientists and
biologists
are
collaborating on
the development
of
machines
that
see.
Physicists and mathematicians are working
to
improve sonar and other senses.
Mechanical engineers have
built
machines that walk on legs, and others that grasp with robot hands of
nearly human dexterity. Yet all of these fledgling efforts have suffered
from poor communication among the various groups, which have not
been able to agree upon even a general outline for the field of robotics.
Despite the chaos,
I expect
to see the
first mass offering from the
cauldron served
in time
for the new millennium,
in
the form of a
general-purpose robot for the factory—and the home.
In industrialized nations, agriculture and manufacturing is increas-
ingly the province of machines, leaving people free to provide human
services
for one another.
Food and goods have become
plentiful
and cheap under this arrangement, but many services have increased
in
cost.
Domestic
service, once common,
is scarce and expensive.
Domestic machines such as food processors, vacuum cleaners, and
Mind in Motion
23
microwave ovens do not
fill the void in families where all the adults
work outside the home. The need has existed for many decades: When
will there be a robot to help around the house?
For many years
I believed that robot servants, ubiquitous in science
fiction, were unlikely in the near future.
Households are complex
environments with limited
resources.
The economic return from
a
mechanical domestic helper would only be a
fraction of the value
of a robot in a
typical industrial
role, so the home robot must
sell
(or
rent)
for much
less.
Worse
yet,
safe and
effective
operation
in the often chaotic home environment
is a
lot more
difficult than
in
controllable factory
settings.
Existing robots
offer mostly blind,
repetitive, potentially lethal motions at a price comparable to that of
an entire residence.
This enormous gap in price and performance
is
real, yet
I now expect to see a general-purpose robot usable in the
home within ten years. The change in my attitude comes partly from
research developments of the
last few years and partly from a new
appreciation of the implications of the concept "general purpose."
Today's industrial robots are more flexible than the fixed automation
they sometimes displace, but they do so very few things well that the
term "general purpose" hardly applies. Indeed, individual robots are
usually bolted to a fixed station, equipped with grippers and some-
times sensors specialized
for a
certain
task, which they henceforth
execute, again and again, perhaps for the rest of their existence. The
narrowness of their repertoire, besides being boring, greatly limits the
number that can be sold.
There are less than 100 thousand robots
(other than toys) of all makes in the world today. Compare this with
100 million cars, 500 million television sets, or 20 milHon computers.
So few units sold can support only a limited amount of engineering
thought and development.
The result
is a less-than-optimal design
at a high
price.
But not forever.
As the number of units produced
grows, so does the opportunity and incentive to improve the design
of the robots and
the
details of
their production.
The costs drop,
and the robots become better, incidentally expanding the market and
increasing the number of units sold, leading to further improvements.
The graph of declining unit cost versus number of units produced
is
called the manufacturer's learning curve.
The potential market
for robots will expand enormously when a
certain level of general usefulness
is achieved. Up to this breakeven
point, specialization—the exploitation of the unique circumstances of
The Robotic Model T
- Current robots are specialized, fixed-station machines with a narrow repertoire that limits their market reach compared to cars or computers.
- The high cost and limited engineering of modern robots are a result of low production volume, creating a cycle of less-than-optimal design.
- A 'breakeven point' exists where general usefulness will trigger mass production, leading to a manufacturer's learning curve that crashes prices.
- The first mass-market robot will be a 'Model T'—not inherently intelligent, but a versatile platform for third-party software applications.
- Once affordable, these robots will enter households, performing tasks ranging from cleaning bathrooms to cooking gourmet meals and weeding lawns.
- The true utility of general-purpose robots will likely emerge from unexpected software applications, mirroring the evolution of the personal computer.
The narrowness of their repertoire, besides being boring, greatly limits the number that can be sold.
Mind in Motion
23
microwave ovens do not
fill the void in families where all the adults
work outside the home. The need has existed for many decades: When
will there be a robot to help around the house?
For many years
I believed that robot servants, ubiquitous in science
fiction, were unlikely in the near future.
Households are complex
environments with limited
resources.
The economic return from
a
mechanical domestic helper would only be a
fraction of the value
of a robot in a
typical industrial
role, so the home robot must
sell
(or
rent)
for much
less.
Worse
yet,
safe and
effective
operation
in the often chaotic home environment
is a
lot more
difficult than
in
controllable factory
settings.
Existing robots
offer mostly blind,
repetitive, potentially lethal motions at a price comparable to that of
an entire residence.
This enormous gap in price and performance
is
real, yet
I now expect to see a general-purpose robot usable in the
home within ten years. The change in my attitude comes partly from
research developments of the
last few years and partly from a new
appreciation of the implications of the concept "general purpose."
Today's industrial robots are more flexible than the fixed automation
they sometimes displace, but they do so very few things well that the
term "general purpose" hardly applies. Indeed, individual robots are
usually bolted to a fixed station, equipped with grippers and some-
times sensors specialized
for a
certain
task, which they henceforth
execute, again and again, perhaps for the rest of their existence. The
narrowness of their repertoire, besides being boring, greatly limits the
number that can be sold.
There are less than 100 thousand robots
(other than toys) of all makes in the world today. Compare this with
100 million cars, 500 million television sets, or 20 milHon computers.
So few units sold can support only a limited amount of engineering
thought and development.
The result
is a less-than-optimal design
at a high
price.
But not forever.
As the number of units produced
grows, so does the opportunity and incentive to improve the design
of the robots and
the
details of
their production.
The costs drop,
and the robots become better, incidentally expanding the market and
increasing the number of units sold, leading to further improvements.
The graph of declining unit cost versus number of units produced
is
called the manufacturer's learning curve.
The potential market
for robots will expand enormously when a
certain level of general usefulness
is achieved. Up to this breakeven
point, specialization—the exploitation of the unique circumstances of
24
Mind Children
a job to achieve acceptable performance with minimum complexity
will be the robotic norm. Beyond the breakeven point, the potential
market will be large enough that higher profits will go toward more
standard
designs
sold
in ever
larger numbers.
The cheap,
mass-
produced,
high-utility robot
will have
arrived.
We have accumu-
lated enough experience to specify some of the characteristics of this
Model T of robots.
It will not be intelligent, and
it will not come pre-
programmed to do many useful tasks.
It will come from the factory
with a sufficient set of mechanical, sensory, and control capabilities
that can be conveniently invoked by software specially written
for
particular applications.
The
first major market
for such
a machine
will be
in
factories,
where
it will be somewhat cheaper and considerably more versatile
than the older generation of robots
it replaces.
Its improved cost-
benefit ratio will allow
it to be used
in a much wider arrav of jobs
and thus in greater quantities, further lowering
its
cost.
In time
it
will become cheaper than
a
small
car,
putting
it within
the reach
of some households and
creating
a demand
for
a huge variety
of
new software.
The robot control programs that actuallv get various
jobs done will come from many different sources, as do programs for
today's personal and business computers.
As with personal computers, many successful appHcations of the
general-purpose
robot
will come
as
surprises
to
its
makers.
We
can speculate about the videogame, word -processor, and spreadsheet
equivalents of the mass robot era, but the reality will be stranger To
get the guessing game going, consider programs that do
light me-
chanical assembly (from a factory automation company), clean bath-
rooms (from a small firm founded by former cleaning stafO, assemble
and cook gourmet meals from
fresh ingredients
(a collaboration of
a computer type and
a
Paris
chef), do tuneups on
a
certain year
of Saturn cars (from the General Motors Saturn service department),
hook patterned rugs (by a Massachusetts high school student), weed a
lawn one weed at a time, participate in robot races (against other soft-
ware—programs are assigned a certain physical robot chassis by
lot
just before the race begins), do detailed earthmoving and stonework
(by an upstart construction company), investigate bomb threats (sold
to police departments worldwide), deliver to and fetch from a ware-
housed inventory, help to assemble and
test other robots (in several
independent stages), and much more. Some of the applications will
The Robot Programming Economy
- The primary human occupation of the future may shift from manual labor to encoding specialized skills into robot application software.
- Skilled workers like plumbers will face a choice between serving a few clients manually or selling their encoded expertise to millions via royalties.
- A massive secondary industry will emerge to facilitate robot programming, including systems that allow robots to learn by being led through motions.
- The resulting library of programs will represent a 'motherlode' of nonverbal human knowledge accessible to future autonomous machines.
- For general-purpose robots to reach a market 'breakeven' point, they must possess versatile locomotion, such as legs, to navigate non-flat terrain.
- Legged robots currently face significant power constraints, often draining batteries quickly compared to the high efficiency of wheels on flat ground.
The skilled plumber, for instance, will be faced with the choice of applying his or her plumbing skills to meet the needs of a few hundred clients or encoding those skills into robot programs that might be sold successfully to thousands or even millions of customers.
Mind in Motion
25
require optional hardware attachments for the robot, special tools and
sensors (such as chemical sniffers), protective coverings, and so on.
It may be that writing applications programs for successive genera-
tions of general-purpose robots will become the major human occupa-
tion in the early decades of the next century. The skilled plumber, for
instance, will be faced with the choice of applying his or her plumbing
skills to meet the needs of a few hundred clients or encoding those
skills into robot programs that might be sold successfully to thousands
or even
millions
of customers.
The
first
alternative
will become
increasingly
less
attractive as
a source of income as manual work
competes with an ever-increasing number of ever-more-sophisticated
robots controlled by ever-better software.
The
latter course has
its
risks also—a program may flop in the marketplace, just as inventions,
books, music,
art, and computer software flop today. On the other
hand,
a successful program might generate years of income for
its
author.
Almost everyone has, or can develop, many skills, and each skill can
be a potential source of royalties when encoded as a program. Many
competing versions
of each
skill
will be marketed and purchased
on the basis of utility, cost, personal taste, fashion, and advertising.
Each program will have a limited lifetime, destined to be eclipsed by
replacements that are either simply better or are designed to operate
a more sophisticated new generation of robot.
A
large secondary
industry will spring up to help in the programming process.
Before long programs will be created
that make general-purpose
robots good learners, teachable, for instance, by leading them through
the motions of the
task, or by example.
The accumulating
library
of such programs will eventually be a motherlode of encoded hu-
man, nonverbal knowledge which can be tapped by
the waves of
increasingly autonomous robots that will follow the breakeven gener-
ation. The expert-systems industry has already begun encoding verbal
knowledge in this fashion.
Breakeven Locomotion
To be successful, a mass-produced general-purpose robot will require
a minimum level of functionality.
The
first robots of this class need
not be able
to do everything,
or even do most
things,
very
well.
They must do enough things well enough
to create an open-ended
26
Mind Children
market for themselves, with each drop in price bringing a more than
proportional increase in the number of economical applications and
units in demand.
Even in highly urban settings, regions of flat, hard ground form an
archipelago in a sea of terrain that
is variously rough,
soft, stepped,
or totally impassable. A machine unable to navigate this sea will be
trapped on a single island,
its potential uses enormouslv restricted.
Our breakeven criterion thus
calls for a drive system more capable
than standard wheels.
Robots with legs are just now showing signs
of
practicality.
The most convincing demonstration
to date
is by
a
California company
called
Odetics, whose
six-legged,
spiderlike,
electrically driven robot can climb out of
its
truck, onto a hatbox,
squeeze through a door, then show off by lifting one end of the truck
and dragging
it around.
This and other promising demonstrations
make it likely that practical legged locomotion will be available within
a decade.
Legs are a powerful mechanism for movement, but their start-stop
nature limits speed and energy efficiency. The Odetics machine, for
instance, drains
its batteries in under an hour of slow walking. The
serious power constraints
in
a self-contained robot may demand
a
more frugal drive system. On
flat ground wheels are best, offering
close to 100% efficiency over a wide range of speed. A compromise
solution may be slow legs terminating in wheeled feet—like powered
roller skates. The robot would
roll on these wheels most of the time
but lift its feet over obstacles and up stairs. On rough ground
it might
plod along slowly in a full walk.
Hitachi, the Japanese electronics giant, experimented
in the early
1980s with a particular!v simple version of the wheel-foot idea.
For
use in nuclear reactors, the Hitachi system has five simple "legs," each
a
vertical, motorized post
that telescopes up and down out of the
body. The legs are arranged uniformly around the robot, in a regular
pentagon.
Each ends in a wheel able to steer and drive.
Five legs
are the minimum that allow a robot to stand stably with any one leg
raised, without shifting its weight. The Hitachi machines climb stairs
by rolling up to them on five wheels, raising the leading one to the
height of the first stair, driving forward until the raised leg is securely
over the step, lowering
it slightly until the contact
is firm, and then
continuing with the next nearest leg. On narrow stairs the robot may
have
its wheels resting on up to three successive steps at the same
Hybrid Mobility and Dexterity
- Engineers are exploring hybrid designs like wheeled legs to combine the speed of rolling with the obstacle-clearing ability of walking.
- Hitachi developed a five-legged robot with telescoping posts and steerable wheels that can climb stairs while keeping its body perfectly level.
- While specialized walking machines like the Odex offer high mobility, they are often limited by high power consumption and short battery life.
- Productive robotics requires at least two arms for manipulation, with a third arm being ideal for complex tasks like soldering.
- Advanced research into multifingered grippers, such as Ken Salisbury's three-fingered hand, aims to replicate human-like dexterity for handling fragile or irregular objects.
The Hitachi machines climb stairs by rolling up to them on five wheels, raising the leading one to the height of the first stair, driving forward until the raised leg is securely over the step, lowering it slightly until the contact is firm, and then continuing with the next nearest leg.
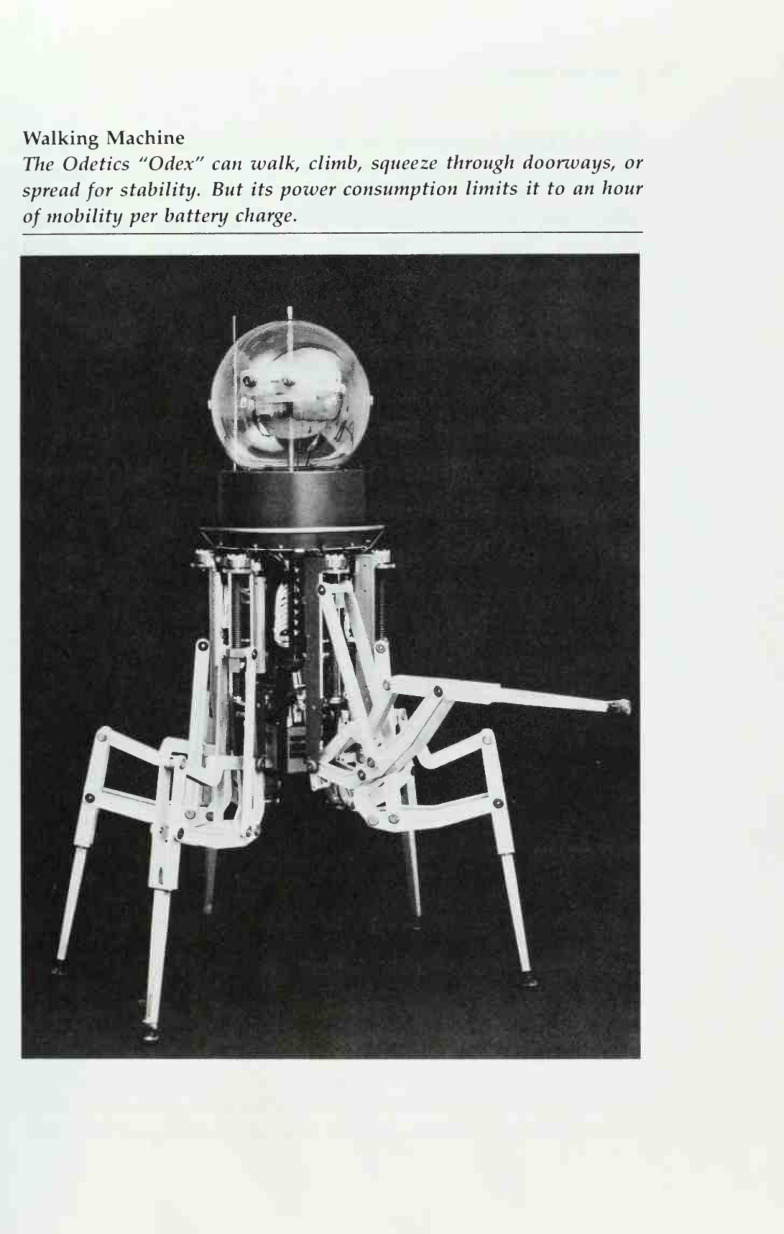
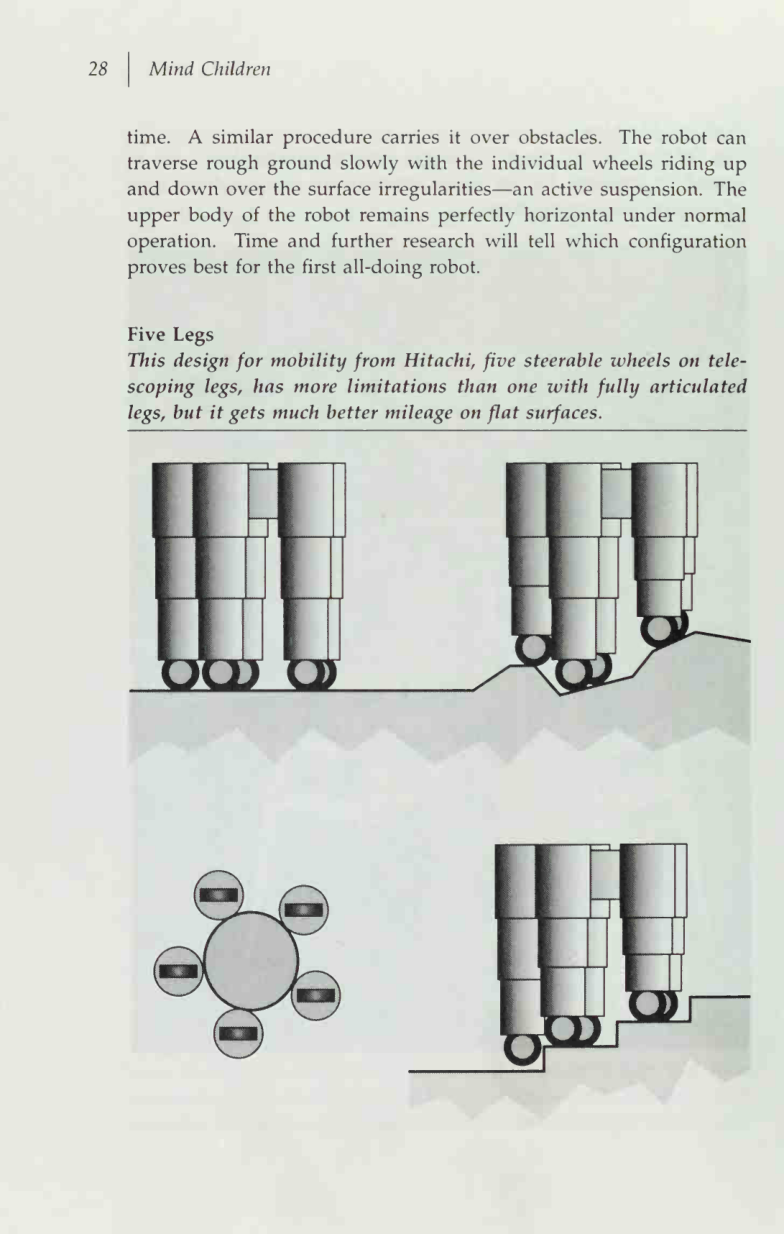
26
Mind Children
market for themselves, with each drop in price bringing a more than
proportional increase in the number of economical applications and
units in demand.
Even in highly urban settings, regions of flat, hard ground form an
archipelago in a sea of terrain that
is variously rough,
soft, stepped,
or totally impassable. A machine unable to navigate this sea will be
trapped on a single island,
its potential uses enormouslv restricted.
Our breakeven criterion thus
calls for a drive system more capable
than standard wheels.
Robots with legs are just now showing signs
of
practicality.
The most convincing demonstration
to date
is by
a
California company
called
Odetics, whose
six-legged,
spiderlike,
electrically driven robot can climb out of
its
truck, onto a hatbox,
squeeze through a door, then show off by lifting one end of the truck
and dragging
it around.
This and other promising demonstrations
make it likely that practical legged locomotion will be available within
a decade.
Legs are a powerful mechanism for movement, but their start-stop
nature limits speed and energy efficiency. The Odetics machine, for
instance, drains
its batteries in under an hour of slow walking. The
serious power constraints
in
a self-contained robot may demand
a
more frugal drive system. On
flat ground wheels are best, offering
close to 100% efficiency over a wide range of speed. A compromise
solution may be slow legs terminating in wheeled feet—like powered
roller skates. The robot would
roll on these wheels most of the time
but lift its feet over obstacles and up stairs. On rough ground
it might
plod along slowly in a full walk.
Hitachi, the Japanese electronics giant, experimented
in the early
1980s with a particular!v simple version of the wheel-foot idea.
For
use in nuclear reactors, the Hitachi system has five simple "legs," each
a
vertical, motorized post
that telescopes up and down out of the
body. The legs are arranged uniformly around the robot, in a regular
pentagon.
Each ends in a wheel able to steer and drive.
Five legs
are the minimum that allow a robot to stand stably with any one leg
raised, without shifting its weight. The Hitachi machines climb stairs
by rolling up to them on five wheels, raising the leading one to the
height of the first stair, driving forward until the raised leg is securely
over the step, lowering
it slightly until the contact
is firm, and then
continuing with the next nearest leg. On narrow stairs the robot may
have
its wheels resting on up to three successive steps at the same
Walking Machine
The Odetics "Odex" can walk, climb, squeeze through doorways, or
spread for stability. But its power consumption limits
it to an hour
of mobility per battery charge.
28
Mind Children
time. A similar procedure carries
it over obstacles.
The robot can
traverse rough ground slow^ly with the individual wheels riding up
and down over the surface irregularities—an active suspension. The
upper body of the robot remains perfectly horizontal under normal
operation.
Time and further research
will
tell which configuration
proves best for the first all-doing robot.
Five Legs
This design for mobility from Hitachi, five steerable wheels on
tele-
scoping
legs, has more limitations than one with fully articulated
legs, but it gets much better mileage on flat surfaces.
Mind in Motion
29
Breakeven Manipulation
Few useful jobs can be accomplished if the robot simply moves about.
Productive work calls for the holding and transporting of ingredients,
parts,
tools, and
other
things.
Industrial
manipulators,
the most
numerous and successful robots
to date, have arms that can reach
where needed by using about six rotary or sliding joints.
If we neglect
fine points of weight, power, and control, some of the smaller designs
are nearly adequate for the reach needed in the breakeven robot. Since
many jobs require bringing pairs of objects into
contact, our robot
will probably come with at least two arms. A third arm would be
advantageous for jobs where the contacting objects must be operated
on in some way (electronic hobbyists will recognize soldering as one
such job).
Robot hands are not as well developed as robot arms. The industrial
manipulators manage
to grasp and
hold
with
special
fixtures
for
particular objects or with a simple two-fingered kind of hand called
a
parallel-jaw
gripper.
Such
grippers
are easy
to
operate but can
safely grasp only some kinds of rugged
object.
They are incapable
of controlling or changing the orientation of something being held.
Our universal robot needs more flexibility.
A few research projects have investigated multifingered grippers
that exhibit much greater dexterity. One of the best comes from a ten-
year effort by Ken Salisbury, now at MIT. Salisbury's three-fingered
robot hand can hold and orient bolts and eggs and manipulate string
in a humanlike fashion. He determined the basic configuration and
dimensions of the hand with a computer search over different linkages,
looking for the minimal set that allowed fingertips to converge on and
securely hold
arbitrarily shaped small objects.
The result has three
symmetrically placed fingers that bend much like those of humans.
However, because the fingers can bend outward as well as inward,
the hand can grip hollow objects from the inside as well as from the
outside. The driving forces come through thin steel cables pulled on
by a bank of motors some distance down the robot's wrist.
To accomplish
feats
of even moderate dexterity
the hands must
"feel"
grasped
objects.
Salisbury
is developing hemispherical
fin-
gertips
for
the hand
that,
through
carefully
placed
internal
strain
gauges, can sense the magnitude and direction of external forces. The
computer programs to plan and
to carry out arm and hand motions
Robotic Dexterity and Navigation
- The Salisbury Hand utilizes three fingers and internal strain gauges to achieve moderate dexterity and the ability to grip objects from the inside or outside.
- Complex robotic manipulators require high-dimensional 'configuration spaces' to plan movements, often resulting in computationally expensive search times.
- Early attempts at autonomous navigation using a single camera failed due to frequent errors in motion estimation and map building.
- The introduction of a sliding camera mechanism allowed for stereoscopic vision, significantly improving the robot's ability to prune errors and map its environment.
- Despite hardware improvements, early autonomous navigation remained a process of 'cautious lurches' prone to occasional catastrophic failures.
In repeated cautious lurches, the Cart was to creep safely to its destination.
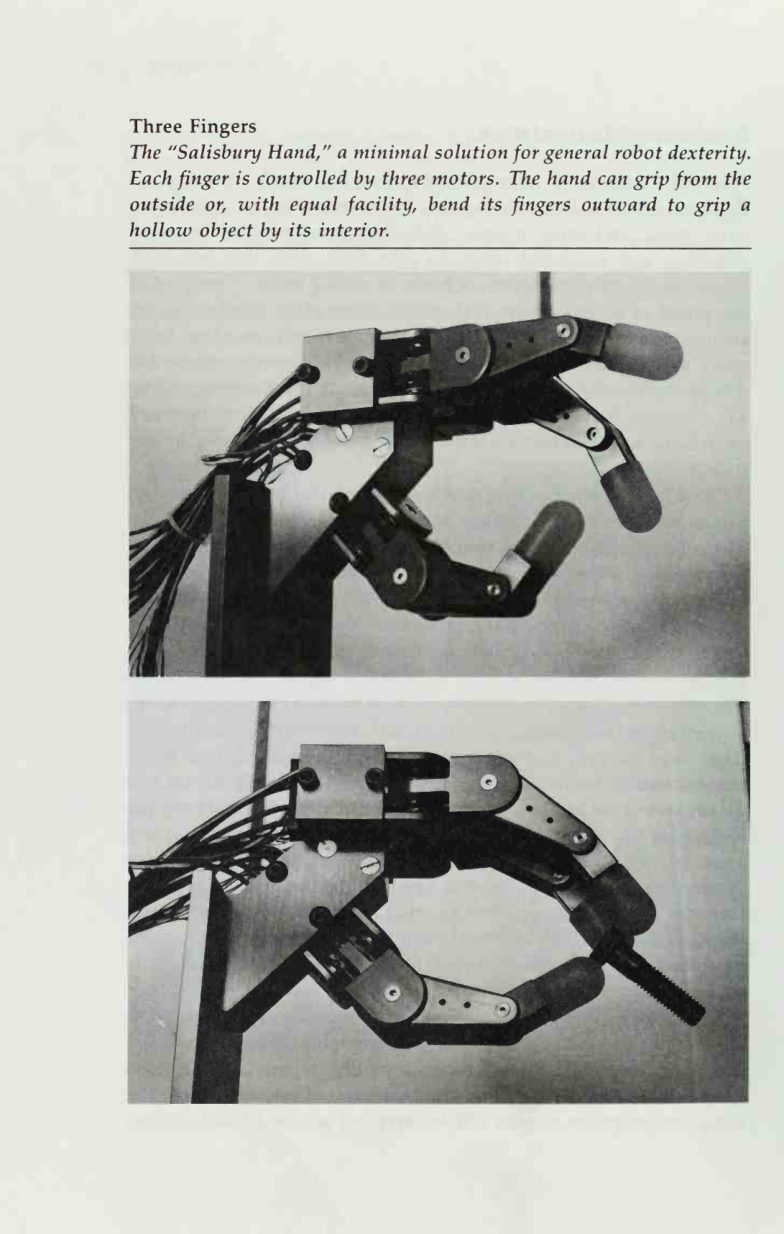
Mind in Motion
29
Breakeven Manipulation
Few useful jobs can be accomplished if the robot simply moves about.
Productive work calls for the holding and transporting of ingredients,
parts,
tools, and
other
things.
Industrial
manipulators,
the most
numerous and successful robots
to date, have arms that can reach
where needed by using about six rotary or sliding joints.
If we neglect
fine points of weight, power, and control, some of the smaller designs
are nearly adequate for the reach needed in the breakeven robot. Since
many jobs require bringing pairs of objects into
contact, our robot
will probably come with at least two arms. A third arm would be
advantageous for jobs where the contacting objects must be operated
on in some way (electronic hobbyists will recognize soldering as one
such job).
Robot hands are not as well developed as robot arms. The industrial
manipulators manage
to grasp and
hold
with
special
fixtures
for
particular objects or with a simple two-fingered kind of hand called
a
parallel-jaw
gripper.
Such
grippers
are easy
to
operate but can
safely grasp only some kinds of rugged
object.
They are incapable
of controlling or changing the orientation of something being held.
Our universal robot needs more flexibility.
A few research projects have investigated multifingered grippers
that exhibit much greater dexterity. One of the best comes from a ten-
year effort by Ken Salisbury, now at MIT. Salisbury's three-fingered
robot hand can hold and orient bolts and eggs and manipulate string
in a humanlike fashion. He determined the basic configuration and
dimensions of the hand with a computer search over different linkages,
looking for the minimal set that allowed fingertips to converge on and
securely hold
arbitrarily shaped small objects.
The result has three
symmetrically placed fingers that bend much like those of humans.
However, because the fingers can bend outward as well as inward,
the hand can grip hollow objects from the inside as well as from the
outside. The driving forces come through thin steel cables pulled on
by a bank of motors some distance down the robot's wrist.
To accomplish
feats
of even moderate dexterity
the hands must
"feel"
grasped
objects.
Salisbury
is developing hemispherical
fin-
gertips
for
the hand
that,
through
carefully
placed
internal
strain
gauges, can sense the magnitude and direction of external forces. The
computer programs to plan and
to carry out arm and hand motions
Three Fingers
The "Salisbury Hand," a minimal solution for general robot dexterity.
Each finger is controlled by three motors. The hand can grip from the
outside
or, with equal facility, bend
its fingers outward
to grip a
hollow object by its interior.
Mind in Motion
31
for complex manipulators are still in a tender state. Several programs
exist that can plan collision-tree arm movements between two points
in known
clutter.
These programs consider
a space
(the
so-called
configuration spjace) that describes all possible postures of the manipu-
lator. Each joint adds one dimension to this space, so a manipulator
as complicated as Salisbury's has a complex configuration space. A
complex space translates into an expensive and time-consuming search
for a good path. Running times of minutes to hours are typical, but
better algorithms continue to be found, and computers continue
to
become faster.
Breakeven Navigation
The mechanical ability to move is onlv part of the problem of mobility.
One must also be able
to find and
return
to
specific locations and
avoid dangers in transit.
I have been working on this issue for most
of mv career and am happv to report that some good solutions are
developing.
My
thesis work
at Stanford during the 1970s was on
programs
that were intended
to
let the Stanford Cart find
its way
through cluttered rooms and outdoor spaces. The first version of such
a program, in 1976, obtained
its \'iew of the world through one TV
camera on the robot. Bv locating distinctive areas in the T\' image and
tracking them as the robot moved, the program was able to estimate
their distance and the extent of its own motion.
It constructed a sparse
three-dimensional map of its surroundings, identified obstacles in
it,
and planned a path to
its destination that staved clear of them. The
program then moved the robot about a meter along that path, looked,
mapped, planned, and moved again.
In repeated cautious lurches, the
Cart was to creep safelv to
its destination.
Unfortunately, the program didn't work. About one lurch in four,
the part of the program that attempted to estimate the robot motion
from the changing image made a mistake, misidentified areas being
tracked, reported an incorrect robot motion, and messed up the slowly
building map.
The chance of successfully crossing a large room,
a
journey of perhaps thirty lurches, was so small as to be negligible.
In
1979
I tried again, with a new program aided by a small amount of
new hardware, a mechanism that precisely moved the camera from
side to side along a track.
With
it, the driving program was able to
obtain several images of the scene without moving the whole robot.
32
Mind Children
much as a human obtains two images, one from each eye. By carefully
exploiting the extra information to prune away errors, the program
improved the success rate for a single lurch to nearly 100%. The robot
was now often able to successfully complete the thirty lurches to cross
a room to the desired destination and show a correct map on a display
screen. About one time in four, however,
it failed, either because the
aggressive error-pruning had removed a real obstacle from the map
and the robot had collided with
it, or because, in spite of the pruning,
errors had crept in and confused the robot's idea of its position. Good
enough for my thesis, perhaps, but not good enough for a robot to do
complex tasks that would, at the minimum, require
it to cross rooms
many times.
In 1980
I moved to Carnegie Mellon University, to continue the re-
search under the auspices of its new Robotics Institute. Two graduate
students. Chuck Thorpe and Larry Matthies, examined and greatly
improved the old program, increasing both its speed and
its accuracy
tenfold. When everything went well,
it was now able to report the
position of the robot (a new one we call Neptune) to a few centimeters
accuracy. Unfortunately, things did not always go well, and the failure
rate remained stubbornly unchanged. The robot still crossed the room
correctly only about three times out of four.
In 1984 our group agreed to do some research for a new company.
Denning Mobile Robotics, Inc., in Massachusetts, that was developing
a
robot
security guard
(more
accurately,
a
roving burglar alarm).
Instead
of a camera,
the robot was equipped
with
a
beltlike
ring
of sonar range sensors like those found
in Polaroid cameras.
These
had already been found to be very useful for detecting the presence
and general
direction
of nearby
obstacles,
thus allowing the robot
to avoid
them.
Our aim was more ambitious,
however.
Instead
of merely sensing imminent collisions, could the continuously active
sonar system be used to build a map of the surroundings that could
direct accurate point-to-point navigation, as (three times out of four)
our vision-guided programs could do? The sonar units each emit an
ultrasonic chirp of sound over a wide cone and report the time to
the
first echo they hear.
This time
is proportional to the distance of
the nearest object within the cone. The distance to the object may be
accurate to better than a centimeter, but since the cone subtends an
angle of about 30°, the side-to-side position
is
still highly uncertain.
This is very different from the almost pinpoint measurements possible
The Evolution of Robot Mapping
- Early vision-guided robots suffered from a persistent 25% failure rate due to accumulated positioning errors.
- The transition from TV cameras to sonar sensors introduced high distance accuracy but significant lateral uncertainty due to wide-angle cones.
- Researchers developed a probabilistic grid method to combine thousands of fuzzy sonar readings into a detailed map.
- This new approach focused on mapping 'empty space' to restrict the possible locations of physical obstacles.
- The probabilistic grid proved far more reliable than previous methods and was successfully adapted back to visual data.
- The Denning Sentry emerged as a commercial success, capable of patrolling warehouses for months using these navigation principles.
The robot still crossed the room correctly only about three times out of four.
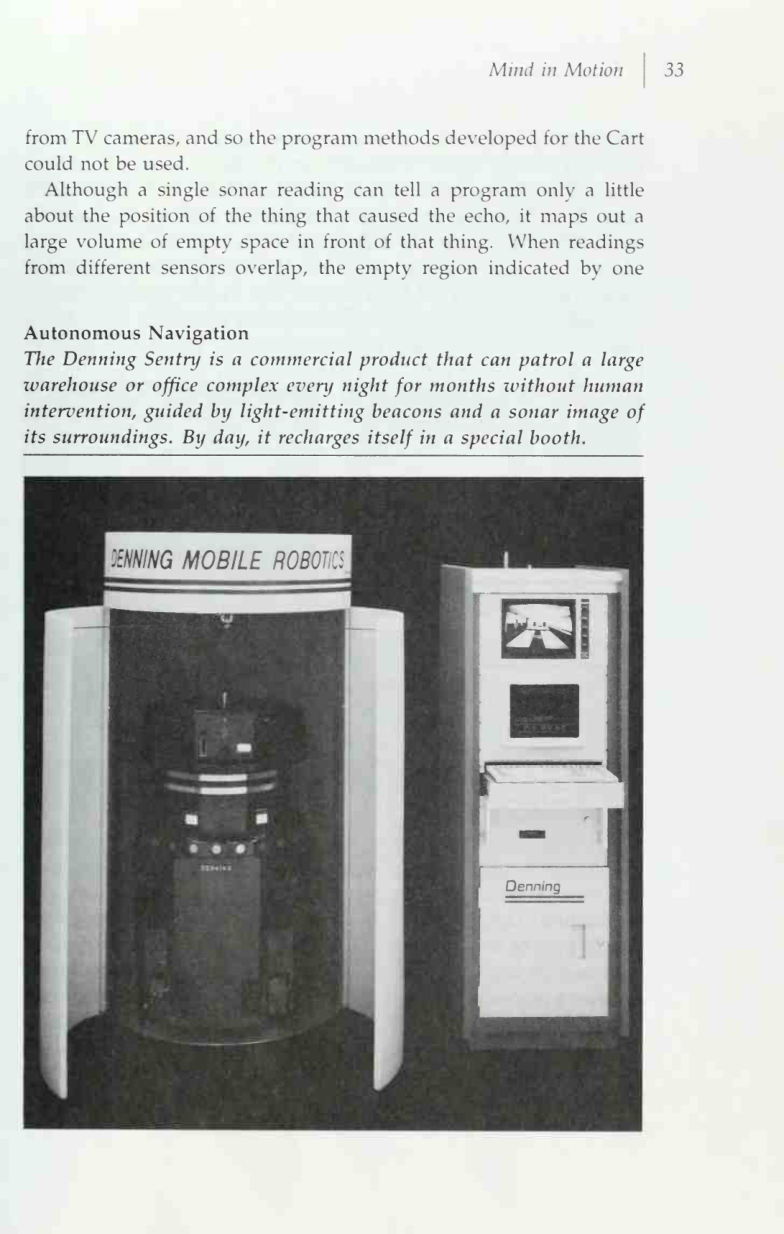
32
Mind Children
much as a human obtains two images, one from each eye. By carefully
exploiting the extra information to prune away errors, the program
improved the success rate for a single lurch to nearly 100%. The robot
was now often able to successfully complete the thirty lurches to cross
a room to the desired destination and show a correct map on a display
screen. About one time in four, however,
it failed, either because the
aggressive error-pruning had removed a real obstacle from the map
and the robot had collided with
it, or because, in spite of the pruning,
errors had crept in and confused the robot's idea of its position. Good
enough for my thesis, perhaps, but not good enough for a robot to do
complex tasks that would, at the minimum, require
it to cross rooms
many times.
In 1980
I moved to Carnegie Mellon University, to continue the re-
search under the auspices of its new Robotics Institute. Two graduate
students. Chuck Thorpe and Larry Matthies, examined and greatly
improved the old program, increasing both its speed and
its accuracy
tenfold. When everything went well,
it was now able to report the
position of the robot (a new one we call Neptune) to a few centimeters
accuracy. Unfortunately, things did not always go well, and the failure
rate remained stubbornly unchanged. The robot still crossed the room
correctly only about three times out of four.
In 1984 our group agreed to do some research for a new company.
Denning Mobile Robotics, Inc., in Massachusetts, that was developing
a
robot
security guard
(more
accurately,
a
roving burglar alarm).
Instead
of a camera,
the robot was equipped
with
a
beltlike
ring
of sonar range sensors like those found
in Polaroid cameras.
These
had already been found to be very useful for detecting the presence
and general
direction
of nearby
obstacles,
thus allowing the robot
to avoid
them.
Our aim was more ambitious,
however.
Instead
of merely sensing imminent collisions, could the continuously active
sonar system be used to build a map of the surroundings that could
direct accurate point-to-point navigation, as (three times out of four)
our vision-guided programs could do? The sonar units each emit an
ultrasonic chirp of sound over a wide cone and report the time to
the
first echo they hear.
This time
is proportional to the distance of
the nearest object within the cone. The distance to the object may be
accurate to better than a centimeter, but since the cone subtends an
angle of about 30°, the side-to-side position
is
still highly uncertain.
This is very different from the almost pinpoint measurements possible
Mi)id in Motion
33
from TV cameras, and so the program methods developed for the Cart
could not be used.
Although
a
single sonar reading can
tell a program only a
little
about the position of the thing that caused the echo,
it maps out a
large volume of empty space in front of that thing. When readings
from
different sensors overlap,
the emptv region
indicated by one
Autonomous Navigation
Tlie Denning Sentnj
is a commercial product that can patrol a large
warehouse or office complex evenj night for months without human
intervention, guided by light-emitting beacons and a sonar image of
its surroundings. By day,
it recharges itself in a special booth.
34
Mind Children
reading may restrict the possible location of the echo-causing object
indicated by
the
other.
Hundreds or thousands
of readings from
different
positions,
taken
together, might be able
to build
detailed
maps
in
spite of the fuzziness
of individual
sensors.
Because
the
sensitivity of a sonar sensor falls off smoothly from the middle to the
edges of its cone,
it seemed best to do the mixing with probabilities.
Alberto Elfes, another graduate student, and
1 wrote a program based
on these ideas and were astonished when
it droxe the robot much
more reliably than the old TV-guided program.
Yet another student,
Bruno Serrey, along with Larry Matthies, then found
a way
to use
the probabilistic approach
for TV data and again discovered
that
it
worked remarkably better than the old approach.
Our new method represents the space around the robot as a grid
of cells, each containing the probability, based on all available sensor
readings, that a corresponding cell in space
is occupied by matter. A
reading may lower the probability of some cells (for instance, those
belonging
to
the
interior
of
a
sonar cone) and
raise others
(such
as those on the range surface of the sonar reading).
It provides
a
convenient way to combine the results of different kinds of readings,
and indeed Elfes and Matthies recently demonstrated a program that
builds maps from both sonar and TV data. Using these new methods,
our robots can now travel long distances almost flawlessly. With a new
mathematical foundation
for
this approach, and
a new, very
fancy,
robot, Uranus,
to continue the work,
I
feel extremely confident that
navigation will be more than adequately in hand within the ten-vear
timeframe of the universal robot.
Breakeven Recognition
The sensory system has another
vital function:
the recognition and
localization of specific objects in the robot's surroundings. Recognized
objects may be small things destined later to be picked up by one of
the hands or large objects that serve as landmarks or work locations.
Imagine a process whereby objects are described by shape and surface
characteristics and the robot's recognition system looks for one object
at a
time.
A
tentative
identification can be confirmed by viewing
the scene from a different point.
The result
is a description of the
position and orientation of the object suitable for use by the program
that controls grasping by the hands.
Robot Vision and Recognition
- New mathematical foundations and sensor fusion between sonar and TV data allow robots to navigate long distances with high reliability.
- Object recognition systems are evolving to identify and localize specific items within cluttered environments for manipulation or landmark navigation.
- The 3DPO program demonstrates the ability to match 3D computer models against real-world jumbles of parts by analyzing surface boundaries.
- Current 'bin-picking' technology remains slow and unreliable for industrial production but proves the feasibility of identifying occluded objects.
- Achieving 'breakeven' performance requires a massive leap in processing power to roughly one billion operations per second to reduce decision times from minutes to seconds.
A robot that spends up to an hour considering every simple move is clearly unacceptable, but a few seconds would be tolerable.
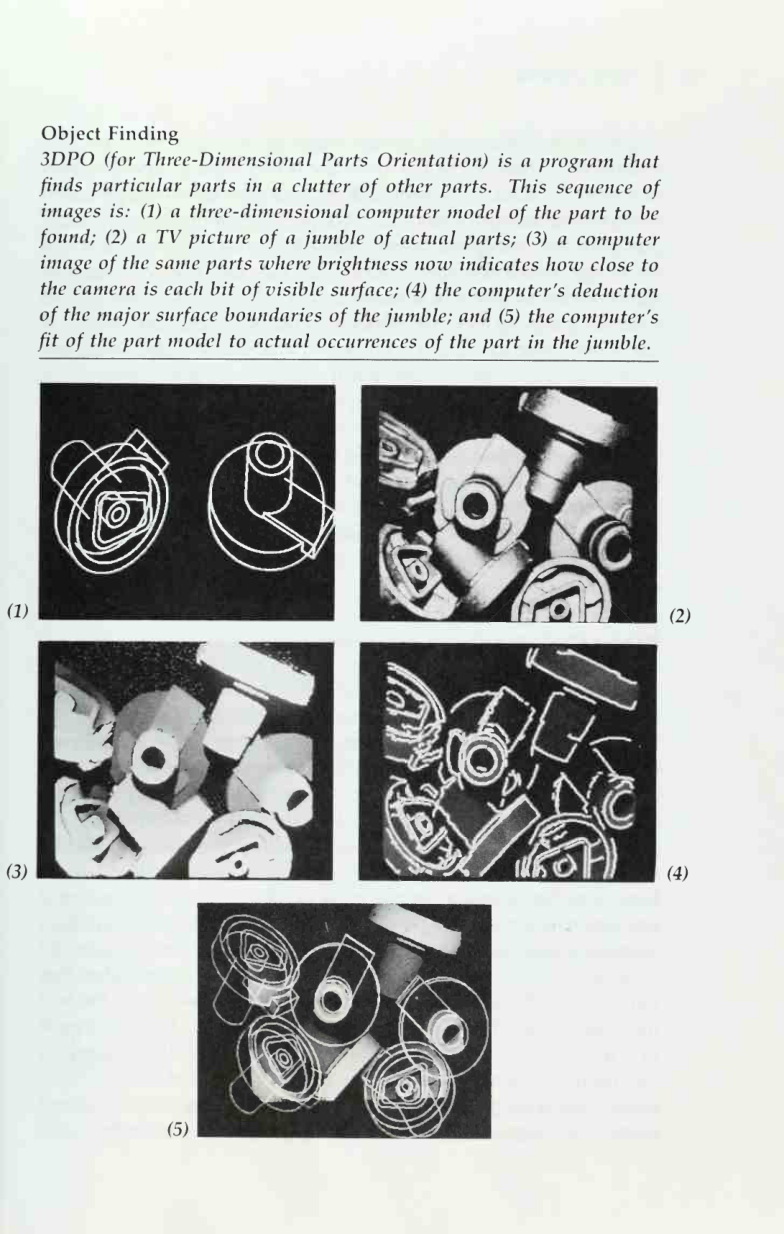
34
Mind Children
reading may restrict the possible location of the echo-causing object
indicated by
the
other.
Hundreds or thousands
of readings from
different
positions,
taken
together, might be able
to build
detailed
maps
in
spite of the fuzziness
of individual
sensors.
Because
the
sensitivity of a sonar sensor falls off smoothly from the middle to the
edges of its cone,
it seemed best to do the mixing with probabilities.
Alberto Elfes, another graduate student, and
1 wrote a program based
on these ideas and were astonished when
it droxe the robot much
more reliably than the old TV-guided program.
Yet another student,
Bruno Serrey, along with Larry Matthies, then found
a way
to use
the probabilistic approach
for TV data and again discovered
that
it
worked remarkably better than the old approach.
Our new method represents the space around the robot as a grid
of cells, each containing the probability, based on all available sensor
readings, that a corresponding cell in space
is occupied by matter. A
reading may lower the probability of some cells (for instance, those
belonging
to
the
interior
of
a
sonar cone) and
raise others
(such
as those on the range surface of the sonar reading).
It provides
a
convenient way to combine the results of different kinds of readings,
and indeed Elfes and Matthies recently demonstrated a program that
builds maps from both sonar and TV data. Using these new methods,
our robots can now travel long distances almost flawlessly. With a new
mathematical foundation
for
this approach, and
a new, very
fancy,
robot, Uranus,
to continue the work,
I
feel extremely confident that
navigation will be more than adequately in hand within the ten-vear
timeframe of the universal robot.
Breakeven Recognition
The sensory system has another
vital function:
the recognition and
localization of specific objects in the robot's surroundings. Recognized
objects may be small things destined later to be picked up by one of
the hands or large objects that serve as landmarks or work locations.
Imagine a process whereby objects are described by shape and surface
characteristics and the robot's recognition system looks for one object
at a
time.
A
tentative
identification can be confirmed by viewing
the scene from a different point.
The result
is a description of the
position and orientation of the object suitable for use by the program
that controls grasping by the hands.
Object Finding
3DPO (for Three-Dimensional Parts Orientation)
is a program that
finds particular parts
in a
clutter of other parts.
This sequence of
images
is:
(1) a three-dimensional computer model of the part to be
found;
(2) a TV picture of a jumble of actual parts;
(3) a computer
image of the same parts where brightness now indicates how close to
the camera
is each bit of visible surface; (4) the computer's deduction
of the major surface boundaries of the jumble; and (5) the computer's
fit of the part model to actual occurrences of the part in the jumble.
36
Mind Children
Computer
vision
is by
far
the most
promising
vehicle
for
this
identification ability. The key operation is identifying a specific object
in a mass of clutter. Vision research for industrial robots has produced
partial solutions to the so-called "bin-picking" problem.
Bin-picking
programs let a computer identify predefined objects in a jumble in a
TV image, even if the objects partially occlude each other, so that they
can be removed one at a time by a manipulator. A General Motors
research group
in the 1970s demonstrated
a system
that worked
if
the overlapping parts mostly lay
flat.
It was too slow and unreliable
to be practical
in production, but
it did demonstrate
feasibility.
In
the
last several years many groups
in the United
States and Japan
have unveiled programs that can identify simple objects on the basis
of three-dimensional data obtained from a camera looking at a scene
illuminated by special devices that generate stripes or grids of light.
On contemporary computers,
these systems take many minutes
to
make their less-than-satisfactory
identifications.
Yet
it
is likely that
the minimal requirements for our robot will be met within our ten-
year timeframe.
Processing and Coordination
The best prototypes for the low-level sensory and movement-planning
parts of our future robot all consume many minutes of computer time
on a good microcomputer.
This
is partly a measure of the patience
of the researchers; processes that run for much longer than an hour
are simply too difficult to investigate effectively, while simpler, faster
programs are not very interesting because they work less well. On
the other hand,
the running times do
tell us something about the
difficulty
of the breakeven
criteria.
A robot
that spends up
to an
hour considering every simple move
is clearly unacceptable, but a
few seconds would be
tolerable.
A computer able
to do
a
billion
operations per second, with a billion bytes of main memory, would
be enough. This is about the power of the largest supercomputers that
have been built to date, and a few hundred times faster than the best
microcomputers. The continued computer evolution should deliver it
in a microcomputer within a decade.
Depending on the progress in
various lines of development, the power may be spread among few or
many individual processing units, and may depend on a significant
fraction of specialized hardware, for instance, circuits to do low-level
The General-Purpose Robot
- Future robots will require computing power of at least a billion operations per second, likely achieved within a decade.
- Robot control systems should be organized into concurrent modules, allowing safety protocols like stairwell detection to override navigation.
- A proposed physical configuration includes five leg-wheels, dual Salisbury hands, stereoscopic vision, and sonar arrays.
- The software architecture mirrors personal computers, utilizing utility functions and third-party application software for diverse tasks.
- Advanced robots maintain internal world models that allow them to plan actions, learn from the past, and potentially explain their motivations.
- As complexity increases, robots may transition from predictable, insectlike behavior to something resembling the character of higher animals.
If a stairwell-detecting module concludes that hazard is near, it would take over control of the robot until the danger was past.
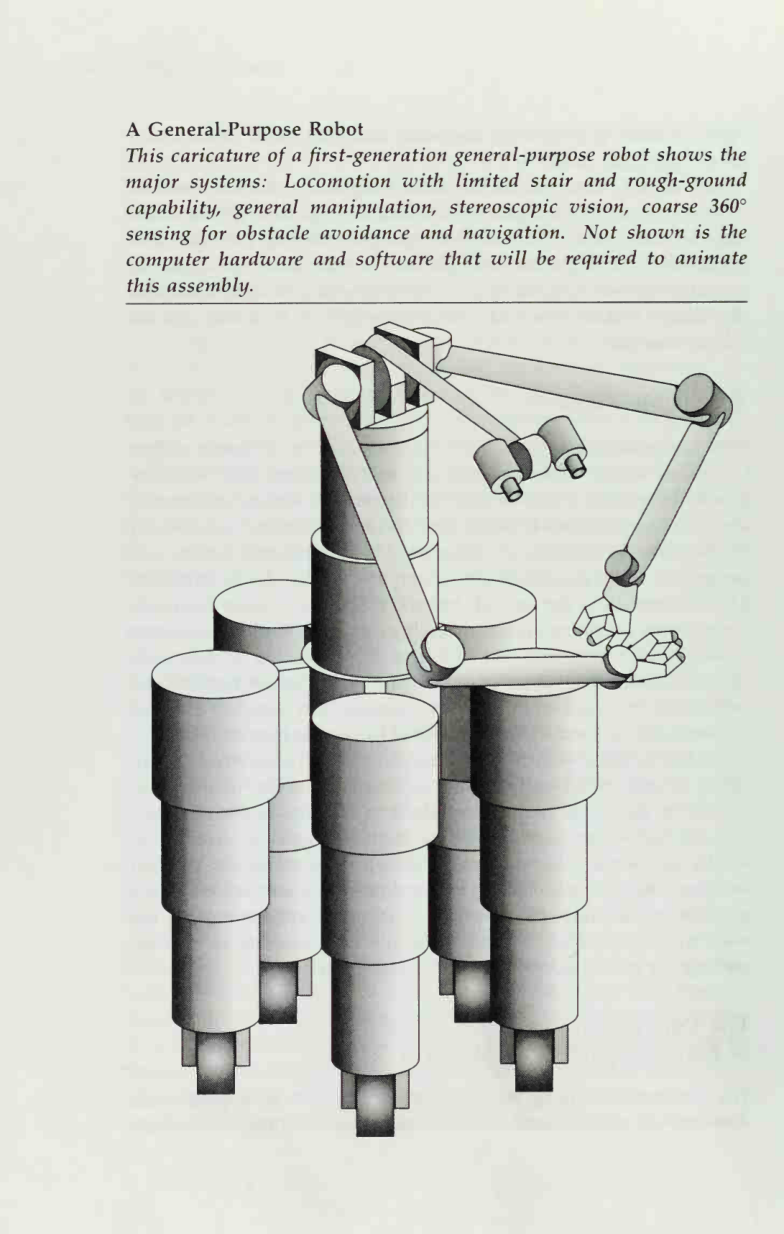
36
Mind Children
Computer
vision
is by
far
the most
promising
vehicle
for
this
identification ability. The key operation is identifying a specific object
in a mass of clutter. Vision research for industrial robots has produced
partial solutions to the so-called "bin-picking" problem.
Bin-picking
programs let a computer identify predefined objects in a jumble in a
TV image, even if the objects partially occlude each other, so that they
can be removed one at a time by a manipulator. A General Motors
research group
in the 1970s demonstrated
a system
that worked
if
the overlapping parts mostly lay
flat.
It was too slow and unreliable
to be practical
in production, but
it did demonstrate
feasibility.
In
the
last several years many groups
in the United
States and Japan
have unveiled programs that can identify simple objects on the basis
of three-dimensional data obtained from a camera looking at a scene
illuminated by special devices that generate stripes or grids of light.
On contemporary computers,
these systems take many minutes
to
make their less-than-satisfactory
identifications.
Yet
it
is likely that
the minimal requirements for our robot will be met within our ten-
year timeframe.
Processing and Coordination
The best prototypes for the low-level sensory and movement-planning
parts of our future robot all consume many minutes of computer time
on a good microcomputer.
This
is partly a measure of the patience
of the researchers; processes that run for much longer than an hour
are simply too difficult to investigate effectively, while simpler, faster
programs are not very interesting because they work less well. On
the other hand,
the running times do
tell us something about the
difficulty
of the breakeven
criteria.
A robot
that spends up
to an
hour considering every simple move
is clearly unacceptable, but a
few seconds would be
tolerable.
A computer able
to do
a
billion
operations per second, with a billion bytes of main memory, would
be enough. This is about the power of the largest supercomputers that
have been built to date, and a few hundred times faster than the best
microcomputers. The continued computer evolution should deliver it
in a microcomputer within a decade.
Depending on the progress in
various lines of development, the power may be spread among few or
many individual processing units, and may depend on a significant
fraction of specialized hardware, for instance, circuits to do low-level
Mind in Motion
37
vision processing. The exact hardware configuration
is unimportant
for our purposes here.
Our work at Carnegie Mellon with integrated
tasks
for a mobile
robot suggests that basic processes should be organized into modules
that run concurrently. A navigation program driving the robot to a
desired location might, for example, coexist with ones that watch out
for surprises and dangers.
If a stairwell-detecting module concludes
that hazard
is near,
it would take over control of the robot until the
danger was past.
A Sensible Robot
Here is a possible configuration for our mass robot.
It moves on five
leg-wheels of the Hitachi design and has two arms with Salisbury
hands. Topped by a pair of color TV cameras,
it has an unobtrusive
array of sonar sensors to sense the world
in directions not covered
by the cameras.
It carries an inexpensive laser gyroscope to help with
navigation, and it is controlled by a computer system able to do at least
a billion operations per second.
Integral with the computer hardware
is a software operating system that allows multiple simultaneous pro-
cesses.
Built-in programs permit objects in the world to be described,
visually identified in or out of clutter, and picked up. A navigational
system can be asked
to build,
store,
retrieve, and compare maps of
the surroundings and to bring the robot to specific locations.
Readers familiar with personal computers may recognize the sim-
ilarity
to operating-system
utility
functions,
especially
the graphic
toolbox
in the Apple Macintosh.
These capabilities in the robot are
orchestrated by application software for (one hopes) an astonishing
variety of specific
jobs; software
is supplied by many independent
vendors.
Again the similarity
to personal computers
is
clear.
One
might eventually hope for integrated software packages that allow the
robot to switch quickly and automatically from one task to another,
making
it a more autonomous mechanical servant.
The Convergent Evolution
of Emotions and Consciousness
The machines we have been
considering behave
in
a
predictable
way that we might describe as mechanical or insectlike.
Will robots
A General-Purpose Robot
This caricature of a first-generation general-purpose robot shows the
major systems:
Locomotion with
limited
stair and rough-ground
capability,
general
manipulation,
stereoscopic
vision,
coarse
360°
sensing for obstacle avoidance and navigation.
Not shown
is
the
computer hardware and software that will be required
to animate
this assembly.
Mind in Motion
39
,
continue to display this predictability as they become more complex,
or wiU they develop something akin to the richer character of higher
animals and humans?
As we have seen, the more advanced control programs in today's
roving robots use data from sensors to maintain representations,
at
varying levels of abstraction and precision, of the world around the
robot,
of the robot's position within
that world, and of the robot's
internal
condition.
The programs
that
plan
actions
for
the
robot
manipulate these world models to weigh alternative future moves.
The world models can also be stored from time to time and examined
later, as a basis for learning.
A verbal
interface keyed
to these programs would meaningfully
answer questions
like "Where are you?"
("I'm
in an area of about
twentv square meters, bounded on three sides, and there are three
small objects in front of me") and "Why did you do that?"
("I turned
right because
I didn't think
1 could
fit through the opening on the
left.")
In our lab, the programs we have developed usually present
such information from the robot's world model in the form of pictures
on a computer screen—a
direct window
into the robot's mind.
In
these internal models of the world
I see the beginnings of awareness
in the minds of our machines—an awareness
I believe will evolve into
consciousness comparable with that of humans.
The term
convergent
evolution
is used by evolutionary
biologists
whenever species that are only very distantly related independently
develop similar characteristics, presumably in response to similar en-
vironmental pressures. Eyes are an example of convergent evolution;
they have evolved over 40 different times
in the animal kingdom.
What was necessary was
the presence
of
light-sensitive
cells and
selection pressures favoring the survival of animals
that could
see,
however dimly at first.
If a function of the nervous svstem as complex
as
vision can evolve so many
different times when environmental
pressures are right, what about emotions and consciousness? Unlike
vision,
these
features of the human mind have no incontrovertible
external
manifestation and indeed
lack
a
precise
definition.
Their
existence in animals, and even in humans, has been questioned bv a
generation of behavioral psychologists. Yet animal ethologists such as
Donald Griffin find the concepts useful in explaining animal behavior.
If an animal acts as
I do when
I am afraid,
is
it not reasonable to call
its mental
state "fear"?
If
it chooses from among several complex
Convergent Evolution of Machine Consciousness
- Visualizing a robot's internal world model on a screen provides a direct window into its burgeoning awareness.
- The author argues that consciousness may arise in machines through convergent evolution, similar to how vision evolved independently forty times in nature.
- While behavioral psychologists question the existence of internal states, ethologists argue that complex decision-making in novel situations justifies the label of consciousness.
- Mobile robots require non-linear control structures to handle unexpected environmental 'surprises' that industrial arms do not face.
- Future robot programming will likely involve concurrent modules like FETCH-CUP and COUNT-DOORS that arbitrate priorities based on changing conditions.
In these internal models of the world I see the beginnings of awareness in the minds of our machines—an awareness I believe will evolve into consciousness comparable with that of humans.
Mind in Motion
39
,
continue to display this predictability as they become more complex,
or wiU they develop something akin to the richer character of higher
animals and humans?
As we have seen, the more advanced control programs in today's
roving robots use data from sensors to maintain representations,
at
varying levels of abstraction and precision, of the world around the
robot,
of the robot's position within
that world, and of the robot's
internal
condition.
The programs
that
plan
actions
for
the
robot
manipulate these world models to weigh alternative future moves.
The world models can also be stored from time to time and examined
later, as a basis for learning.
A verbal
interface keyed
to these programs would meaningfully
answer questions
like "Where are you?"
("I'm
in an area of about
twentv square meters, bounded on three sides, and there are three
small objects in front of me") and "Why did you do that?"
("I turned
right because
I didn't think
1 could
fit through the opening on the
left.")
In our lab, the programs we have developed usually present
such information from the robot's world model in the form of pictures
on a computer screen—a
direct window
into the robot's mind.
In
these internal models of the world
I see the beginnings of awareness
in the minds of our machines—an awareness
I believe will evolve into
consciousness comparable with that of humans.
The term
convergent
evolution
is used by evolutionary
biologists
whenever species that are only very distantly related independently
develop similar characteristics, presumably in response to similar en-
vironmental pressures. Eyes are an example of convergent evolution;
they have evolved over 40 different times
in the animal kingdom.
What was necessary was
the presence
of
light-sensitive
cells and
selection pressures favoring the survival of animals
that could
see,
however dimly at first.
If a function of the nervous svstem as complex
as
vision can evolve so many
different times when environmental
pressures are right, what about emotions and consciousness? Unlike
vision,
these
features of the human mind have no incontrovertible
external
manifestation and indeed
lack
a
precise
definition.
Their
existence in animals, and even in humans, has been questioned bv a
generation of behavioral psychologists. Yet animal ethologists such as
Donald Griffin find the concepts useful in explaining animal behavior.
If an animal acts as
I do when
I am afraid,
is
it not reasonable to call
its mental
state "fear"?
If
it chooses from among several complex
40
Mind Children
alternatives in dealing with a novel situation, as
I would consciously
weigh my options in the same circumstance, why not ascribe "con-
sciousness" instead of some other mechanism with a different name
but the same effect?
Consider the following thought experiment.
Suppose we wish to
make a robot that can execute some general task such as "Go down
the hall to the third door, go
in, look for a cup, and bring
it back."
Our most pressing need would be
a computer language
in which
to specify complex tasks for the rover and a hardware and software
system to embody
it.
Sequential control languages successfully used
with industrial manipulators might seem to be a good starting point.
But paper attempts
to define
the
structures and
primitive
actions
required
for mobility would reveal that the linear control structure
of these state-of-the-art languages, though adequate for a robot arm,
would prove to be inadequate for a
rover.
The essential difference
is that a rover, in
its wanderings,
is regularly "surprised" by events
which
it cannot anticipate but with which
it must deal. This requires
that contingency
routines be
activated
in
arbitrary order and run
concurrently, each with its own access to the needed sensors, effectors,
and
the
internal
state
of
the machine,
and
a way
of
arbitrating
their differences.
As conditions change, the priority of the modules
changes, and control may be passed from one to another.
A request
to our future robot
to go down
the
hall
to
the
third
door, go in, look for a cup, and bring
it back might be implemented
as
a
module,
FETCH-CUP,
that
looks
very much
like
a program
written for the arm-control languages (which in turn look very much
like programming languages such
as Algol
or
Basic),
except
that
another module, COUNT-DOORS, would run concurrently with
the
main routine. Consider the following outline for such a program.
Module COUNT-DOORS:
Check the robot's surroundings for doors
Add one to the variable DOOR-NUMBER each time a new door is located
Record the location of the new door in the variable DOOR-LOCATION
Module GO-FETCH-CUP:
Step
1:
Record the current location of the robot in the variable START-
LOCATION
Step 2:
Set the variable DOOR-NUMBER to zero
Robotic Logic and Anthropomorphism
- A detailed algorithmic script outlines the complex steps required for a robot to navigate a hallway and retrieve a cup.
- Sensor failures, such as misidentifying a poster-covered door, demonstrate how easily a robot's internal logic can diverge from physical reality.
- Concurrent programming modules like DETECT-CLIFF act as safety overrides that can seize control from primary tasks when danger is sensed.
- The transition between tasks—from goal-oriented movement to emergency avoidance—mimics biological behaviors like fear or preoccupation.
- The author argues that using anthropomorphic language to describe these machine behaviors is a valid interpretation of their functional complexity.
The fourth door, sadly, leads to the stairwell, and the poor robot, unequipped to travel on stairs, is in mortal danger.
Mind in Motion
41
Step 3:
Wake up the COUNT-DOORS module
Step 4:
Drive the robot parallel to the right-hand wall until DOOR-
NUMBER is three or greater
Step 5:
Cause the robot to face the location in the variable DOOR-
LOCATION
Step 6:
If the robot is facing an open door, go to Step 10
Step 7:
If the robot is not facing a door, subtract one from DOOR-NUMBER
and go to Step 4
Step 8:
If the robot is facing a closed door, try to open
it
Step 9:
If the door fails to open, say "knock knock" and go to Step 6
Step 10: Drive the robot through the open door
Step 11: Check the robot's surroundings for cups;
if there are none, go
to Step 15
Step 12: Record the location of the nearest cup in CUP-LOCATION
Step 13: Drive the robot to within reach of the CUP-LOCATION
Step 14: Pick up the cup at CUP-LOCATION;
if this fails go to Step 15
Step 15: Go back and face the door at DOOR-LOCATION
Step 16:
If the robot is facing a closed door, try to open
it
Step 17:
If the door fails to open, say "knock knock" and go to Step 16
Step 18: Drive the robot through the open door
Step 19: Return to START-LOCATION
Step 20: Put the robot to sleep
So far so good. We activate our program, and the robot obediently
begins to trundle down the
hall, counting doors.
It correctly recog-
nizes the first one. The second door, unfortunately,
is decorated with
garish posters, and the lighting in that part of the corridor is poor, so
our experimental door-recognizer fails to detect
it. The wall-follower,
however, continues to operate properly and the robot continues on
down the hall,
its door count short by one.
It recognizes door 3, the
one we had asked
it to go through, but thinks
it is only the second,
so continues. The next door is recognized correctly and
is open. The
program,
thinking
it
is the
third one,
faces
it, and proceeds
to go
through. This fourth door, sadly, leads to the stairwell, and the poor
robot, unequipped to travel on stairs,
is in mortal danger.
Fortunately,
there
is another module
in our concurrent program-
ming system called DETECT-CLIFF. This program
is always running
and checks ground position data incidentally produced by the vision
processes and also requests sonar and infrared proximity checks on
42
Mind Children
the ground.
It combines these, perhaps with an a
priori expectation
of finding a chff set high when operating in dangerous areas, to pro-
duce a number that indicates the Ukehhood there
is a drop-off in the
neighborhood. A companion process DEAL-WITH-CLIFF, also running
continuously but with low priority, regularly checks this number and
adjusts
its own priority on the basis of
it. When the cliff probability
variable (perhaps we'll
call
it VERTIGO) becomes high enough,
the
priority of DEAL-WITH-CLIFF will exceed the priority of the current
process in control, GO-FETCH-CUP in our example, and DEAL-WITH-
CLIFF takes over control of the robot. A properly written DEAL-WITH-
CLIFF will then proceed to stop or greatly slow down the movement of
the robot, to increase the frequency of sensor measurements of the cliff,
and to back away slowly from
it when
it has been reliably identified
and located.
Now there
is
a curious thing about
this sequence of actions.
A
person seeing them, not knowing about the internal mechanisms of the
robot, might offer the interpretation, "First the robot was determined
to go through the door, but then
it noticed the stairs and became so
frightened and preoccupied it forgot all about what it had been doing."
Knowing what we do about what really happened
in the robot, we
might be tempted to chastise this poor person for using such sloppy
anthropomorphic concepts as determination, fear, preoccupation, and
forgetfulness in describing the actions of a machine. We could chastise
the person, but in my opinion that would be wrong. The robot came
by
its
foibles and
reactions
as
honestly
as any
living animal;
the
observed behavior is the correct course of action for a being operating
with uncertain data in a dangerous world. An octopus in pursuit of
a meal can be diverted by subtle threats of danger in just the way the
robot was. The invertebrate octopus also happens to have a nervous
system
that evolved
entirely independently
of our own
vertebrate
version.
Yet most of us feel no qualms about ascribing qualities like
passion, pleasure, fear, and pain to the actions of the animal.
I believe
that we have in the behavior of a person, an octopus, and a robot a
case of convergent evolution. The needs of the mobile way of life have
conspired in all three instances to create an entity that has modes of
operation for different circumstances and that changes quickly from
mode
to mode on
the basis of uncertain and noisy data prone
to
misinterpretation. As the complexity of mobile robots increases, their
similarity to animals and humans will become even greater.
Convergent Evolution of Mind
- The author argues that robots, octopuses, and humans exhibit convergent evolution in behavior due to the shared requirements of a mobile lifestyle in a dangerous world.
- Current robot programs are compared to the nervous systems of spiders, having progressed beyond the 'bacterial' stage of simple light-seeking behaviors.
- Animal consciousness is framed as an internal model of the self and surroundings that allows for the consideration of alternative actions.
- The 'waggle dance' of bees serves as a complex example of collective decision-making and communication based on internal maps of desirability.
- Roboticists are actively working to create internal world models in roving machines that mirror the decision-making capabilities found in nature.
- While robotics research avoids the controversial labels of 'emotion' or 'consciousness,' its practical goals are leading toward the same functional outcomes.
The needs of the mobile way of life have conspired in all three instances to create an entity that has modes of operation for different circumstances and that changes quickly from mode to mode on the basis of uncertain and noisy data prone to misinterpretation.
42
Mind Children
the ground.
It combines these, perhaps with an a
priori expectation
of finding a chff set high when operating in dangerous areas, to pro-
duce a number that indicates the Ukehhood there
is a drop-off in the
neighborhood. A companion process DEAL-WITH-CLIFF, also running
continuously but with low priority, regularly checks this number and
adjusts
its own priority on the basis of
it. When the cliff probability
variable (perhaps we'll
call
it VERTIGO) becomes high enough,
the
priority of DEAL-WITH-CLIFF will exceed the priority of the current
process in control, GO-FETCH-CUP in our example, and DEAL-WITH-
CLIFF takes over control of the robot. A properly written DEAL-WITH-
CLIFF will then proceed to stop or greatly slow down the movement of
the robot, to increase the frequency of sensor measurements of the cliff,
and to back away slowly from
it when
it has been reliably identified
and located.
Now there
is
a curious thing about
this sequence of actions.
A
person seeing them, not knowing about the internal mechanisms of the
robot, might offer the interpretation, "First the robot was determined
to go through the door, but then
it noticed the stairs and became so
frightened and preoccupied it forgot all about what it had been doing."
Knowing what we do about what really happened
in the robot, we
might be tempted to chastise this poor person for using such sloppy
anthropomorphic concepts as determination, fear, preoccupation, and
forgetfulness in describing the actions of a machine. We could chastise
the person, but in my opinion that would be wrong. The robot came
by
its
foibles and
reactions
as
honestly
as any
living animal;
the
observed behavior is the correct course of action for a being operating
with uncertain data in a dangerous world. An octopus in pursuit of
a meal can be diverted by subtle threats of danger in just the way the
robot was. The invertebrate octopus also happens to have a nervous
system
that evolved
entirely independently
of our own
vertebrate
version.
Yet most of us feel no qualms about ascribing qualities like
passion, pleasure, fear, and pain to the actions of the animal.
I believe
that we have in the behavior of a person, an octopus, and a robot a
case of convergent evolution. The needs of the mobile way of life have
conspired in all three instances to create an entity that has modes of
operation for different circumstances and that changes quickly from
mode
to mode on
the basis of uncertain and noisy data prone
to
misinterpretation. As the complexity of mobile robots increases, their
similarity to animals and humans will become even greater.
Mind in Motion
43
Hold on
a
minute, you
say.
There may be some resemblance
between the robot's reaction to a dangerous situation and an animal's,
but surely there are differences.
Isn't the robot more like a startled
spider,
or even
a bacterium,
than
like
a
frightened human being?
Wouldn't
it react over and over again in exactly the same way, even
if the situation turned out not to be dangerous?
You've caught me.
I think the spider's nervous system
is an excellent match
for robot
programs possible today. (We passed the bacterial stage in the 1950s
with light-seeking electronic turtles.) This does not mean that concepts
like thinking and consciousness must be ruled out, however.
In
his book Animal Thinking,
Griffin reviews evidence that much
animal behavior, including the behavior of insects, can be explained
economically in terms of consciousness: an internal model of the self,
surroundings, and other individuals
that, however crudely, allows
consideration of alternative actions.
For instance, bees, as Otto von
Frisch discovered, communicate direction, distance, and desirability of
a food source to other members of a hive by the direction, length, and
vigor of each burst in a "waggle dance."
Martin Lindauer extended
Frisch's observations to cases where a swarm from an overpopulated
colony seeks out
a new
site.
A worker from the swarm
flies out
in
search
of
suitable
cavities and
returns when
it has found and
meticulously explored
one.
It then performs a waggle dance, on
the
surface
of
the swarm,
describing
the
location and
suitability
of
its discovery.
Meanwhile, other workers
tell of other locations.
Promising sites are visited and carefully examined by other members
of the swarm, who return
to
tell the
tale. A worker telling of one
site
is
unaffected by
another bee sending
the same message but
can be "converted" by a sufficiently emphatic and repeated display
describing a different location. The debate rages for several days, with
repeated
visits to a dwindling number of candidate
sites, until near
unanimity is reached. The entire swarm then flies to take up residence
in the winning
cavity.
This performance might be explained
if we
postulate a simple map in the brain of each bee describing locations
and
their desirability, maps which can be modified by the complex
experiences of exploration or the simpler ones of communication and
which can become the basis of choice.
An internal model of the world complex enough to allow choices
in behavior—whether or not we
call
this model "consciousness"
is what
roboticists
are
currently
trying
to achieve
in
their roving
44
Mind Children
robots.
In
fact,
robotics
research
is
too
practical
to
seriously
set
itself the explicit goal of producing machines with such nebulous and
controversial characteristics as emotion and consciousness.
It would
be enough if our machines could make a living in the face of the many
surprises, setbacks, opportunities, barriers, and competitors they will
encounter in the world. But natural selection, the guiding mechanism
of Darwinian evolution,
is equally
utilitarian, and yet here we
are,
with feelings and a sense of self.
In The Growth of Biological Thought, the evolutionary biologist Ernst
Mayr
points
out
that both
living and
nonliving systems
"almost
always have the property that the characteristics of the whole cannot
(even
in theory) be deduced from the most complete knowledge of
the components, taken separately or in other partial combinations."
Emergence—this appearance of novel properties
in whole systems
has often been invoked to explain such difficult biological realities as
mind, consciousness, and even life itself. Here is how
I imagine some
of the more mysterious mental experiences
that we associate with
human beings might emerge in our machines as we pursue utilitarian
functionality.
Learning
When tickled, the sea slug Aplysia withdraws
its delicate
gills into
its body.
If the tickling
is repeated often, with no
ill
effect, Aplysia
gradually learns to ignore the nuisance, and the gills remain deployed.
If,
later, tickles are followed by harsh stimuli, such as contact with a
strong acid, the withdrawal reflex returns with a vengeance.
Either
way,
the modified behavior
is remembered
for hours.
Aplysia has
been studied so thoroughly in the last few decades that the neurons
involved in the reflex are well known, and the learning has recently
been traced to chemical changes in single synapses on these neurons.
Larger networks of neurons can adapt
in more elaborate ways,
for
instance by learning to associate specific pairs of stimuli with one an-
other. Such mechanisms tune a nervous system to the body it inhabits
and
to
its environment.
Vertebrates owe much of their behavioral
flexibility to an elaboration of this arrangement, systems that can be
activated from many locations that encourage and discourage future
repetitions of recent behaviors. Though the neural architecture of these
Emergence and Machine Learning
- The author argues that complex traits like consciousness emerge from whole systems and cannot be deduced from individual components.
- Biological learning is illustrated by the sea slug Aplysia, which adapts its reflexes based on chemical changes in single synapses.
- Subjective sensations of pleasure and pain in vertebrates are seen as evolutionary mechanisms to encourage or discourage specific behaviors.
- Current robots have limited learning capacities, but future machines will require general learning abilities to navigate unpredictable environments.
- The author proposes a unified conditioning mechanism for robots that uses success and trouble signals to refine decision-making over time.
Emergence—this appearance of novel properties in whole systems has often been invoked to explain such difficult biological realities as mind, consciousness, and even life itself.
44
Mind Children
robots.
In
fact,
robotics
research
is
too
practical
to
seriously
set
itself the explicit goal of producing machines with such nebulous and
controversial characteristics as emotion and consciousness.
It would
be enough if our machines could make a living in the face of the many
surprises, setbacks, opportunities, barriers, and competitors they will
encounter in the world. But natural selection, the guiding mechanism
of Darwinian evolution,
is equally
utilitarian, and yet here we
are,
with feelings and a sense of self.
In The Growth of Biological Thought, the evolutionary biologist Ernst
Mayr
points
out
that both
living and
nonliving systems
"almost
always have the property that the characteristics of the whole cannot
(even
in theory) be deduced from the most complete knowledge of
the components, taken separately or in other partial combinations."
Emergence—this appearance of novel properties
in whole systems
has often been invoked to explain such difficult biological realities as
mind, consciousness, and even life itself. Here is how
I imagine some
of the more mysterious mental experiences
that we associate with
human beings might emerge in our machines as we pursue utilitarian
functionality.
Learning
When tickled, the sea slug Aplysia withdraws
its delicate
gills into
its body.
If the tickling
is repeated often, with no
ill
effect, Aplysia
gradually learns to ignore the nuisance, and the gills remain deployed.
If,
later, tickles are followed by harsh stimuli, such as contact with a
strong acid, the withdrawal reflex returns with a vengeance.
Either
way,
the modified behavior
is remembered
for hours.
Aplysia has
been studied so thoroughly in the last few decades that the neurons
involved in the reflex are well known, and the learning has recently
been traced to chemical changes in single synapses on these neurons.
Larger networks of neurons can adapt
in more elaborate ways,
for
instance by learning to associate specific pairs of stimuli with one an-
other. Such mechanisms tune a nervous system to the body it inhabits
and
to
its environment.
Vertebrates owe much of their behavioral
flexibility to an elaboration of this arrangement, systems that can be
activated from many locations that encourage and discourage future
repetitions of recent behaviors. Though the neural architecture of these
Mind in Motion
45
systems in vertebrates is not understood, their effect is evident in the
subjective sensations we call pleasure and pain.
Existing robot systems are,
at best, configured to learn a few spe-
cific things from their environment—a simple sequence of moves, the
location of an expected component, the position of nearby obstacles,
sometimes a few parameters for best controlling a motor or interpret-
ing a sensor. There is
little point in having them learn to orchestrate
their actions in complicated ways when we can hardly program them
to do one thing at a time well. Yet this primitive state of affairs will not
last forever. Beginning, perhaps, with the universal robot
I described
earlier,
it will become desirable to add some very general learning
abilities.
A robot's safety and usefulness
in a home would be greatly en-
hanced
if
it could learn
to avoid idiosyncratic dangers and exploit
opportunities.
If a particular door on a certain route is often locked,
it
might be worthwhile if the robot could learn to favor a longer but more
reliable path. A job might be done more effectively
if the changing
location of a needed ingredient could be learned or even anticipated
from subtle clues.
It is impossible to explicitly program the robot for
every such eventuality, but much could be accomplished by a unified
conditioning mechanism which increased the probability of decisions
that had proven effective in the past under similar circumstances and
decreased
it
for ones that had been followed by wasted activity or
danger.
The conditioning software
I have in mind would receive two kinds
of messages from anywhere within the robot, one telling of success,
the other of trouble. Some—for instance indications of full batteries,
or imminent
collisions—would
be
generated by
the
robot's
basic
operating system.
Others, more specific to accomplishing particular
tasks, could be initiated by applications programs for those tasks. I'm
going to call the success messages "pleasure" and the danger messages
"pain."
Pain would tend to interrupt the activity in progress, while
pleasure would increase its probability of continuing.
The messages also would provide input to a program that used sta-
tistical techniques to compactly "catalog" the time, position, activity,
surroundings, and other properties known to the robot that preceded
the signal. A "recognizer" would constantly monitor these variables
and compare them with entries
in the catalog.
Whenever a
set of
Robotic Pleasure and Pain
- The author proposes defining robotic success and danger signals as 'pleasure' and 'pain' to guide behavior.
- A statistical cataloging system would allow robots to associate environmental variables with these signals to predict future outcomes.
- Chains of association enable robots to avoid trouble early, though they risk developing 'phobias' or 'addictions' if signals don't weaken over time.
- Conditioning allows for human-led training through simple verbal cues like 'good' or 'bad' rather than complex reprogramming.
- Robots can use trial-and-error to develop their own successful task sequences, which can then be abstracted and shared with other machines.
- Without such conditioning, robots are prone to 'mindless repetition' similar to the behavior of insects.
If the strength of the secondary warnings does not weaken sufficiently as the chain lengthens, pain could grow into an incapacitating phobia and pleasure into an equally incapacitating addiction.
Mind in Motion
45
systems in vertebrates is not understood, their effect is evident in the
subjective sensations we call pleasure and pain.
Existing robot systems are,
at best, configured to learn a few spe-
cific things from their environment—a simple sequence of moves, the
location of an expected component, the position of nearby obstacles,
sometimes a few parameters for best controlling a motor or interpret-
ing a sensor. There is
little point in having them learn to orchestrate
their actions in complicated ways when we can hardly program them
to do one thing at a time well. Yet this primitive state of affairs will not
last forever. Beginning, perhaps, with the universal robot
I described
earlier,
it will become desirable to add some very general learning
abilities.
A robot's safety and usefulness
in a home would be greatly en-
hanced
if
it could learn
to avoid idiosyncratic dangers and exploit
opportunities.
If a particular door on a certain route is often locked,
it
might be worthwhile if the robot could learn to favor a longer but more
reliable path. A job might be done more effectively
if the changing
location of a needed ingredient could be learned or even anticipated
from subtle clues.
It is impossible to explicitly program the robot for
every such eventuality, but much could be accomplished by a unified
conditioning mechanism which increased the probability of decisions
that had proven effective in the past under similar circumstances and
decreased
it
for ones that had been followed by wasted activity or
danger.
The conditioning software
I have in mind would receive two kinds
of messages from anywhere within the robot, one telling of success,
the other of trouble. Some—for instance indications of full batteries,
or imminent
collisions—would
be
generated by
the
robot's
basic
operating system.
Others, more specific to accomplishing particular
tasks, could be initiated by applications programs for those tasks. I'm
going to call the success messages "pleasure" and the danger messages
"pain."
Pain would tend to interrupt the activity in progress, while
pleasure would increase its probability of continuing.
The messages also would provide input to a program that used sta-
tistical techniques to compactly "catalog" the time, position, activity,
surroundings, and other properties known to the robot that preceded
the signal. A "recognizer" would constantly monitor these variables
and compare them with entries
in the catalog.
Whenever a
set of
46
Mind Children
conditions occurred that was similar to those that had often preceded
pain
(or pleasure)
in
the
past,
the recognizer would
itself issue a
somewhat weaker pain (or pleasure) message. In the case of pain, this
warning message might prevent the activity that had caused trouble
before.
In time the warning messages themselves would accumulate
in the catalog, and the robot would begin to avoid the steps that led to
the steps that caused the original problem. Eventually a long chain of
associations like this could head off trouble at a very early stage. There
are pitfalls, of course.
If the strength of the secondary warnings does
not weaken sufficiently as the chain lengthens, pain could grow into
an incapacitating phobia and pleasure into an equally incapacitating
addiction.
Besides allowing the robot to adapt opportunistically to its environ-
ment, a pleasure-pain mechanism could be exploited by applications
programs
in more directed ways.
Suppose the robot has a spoken
word recognizer. A module that simply generates a pleasure signal
on hearing the word "good" and a pain message on hearing "bad"
would allow a customer to easily modify the robot's behavior.
If the
robot was making a nuisance of
itself by vacuuming while a room
was in use, a few utterances of "bad!"
might train
it to desist until
conditions changed, for instance at a different time of day or when
the room was empty.
A robot with conditioning software could be programmed to train
itself.
If a task in an application program required that a certain kind
of container be opened,
it would be possible to write a detailed
list of
instructions describing just how to hold, turn, and pull to get the job
done.
Alternatively, a robot at the factory could be programmed to
pick up many such containers, one after another, and randomly push,
twist, shake, and pull each one until
it either opened or broke. The
training program would recognize both situations and issue a pleasure
message in one case and a pain signal in the other before going on to
the next container. Gradually the conditioning system would inhibit
those sequences that caused breakage and
facilitate those that were
successful. An abstracted version of the training catalog for the session
could then be inserted into the final application program in place of
explicit instructions, combined, perhaps, with catalogs for other parts
of the task developed on other robots.
Infinite patience would be an asset in a training session, but it could
be exasperating in a robot in the field.
In the cup-fetching program
I
Mind in Motion
47
described earlier, you may have noted that if the robot finds the door
closed and
is unable to open
it,
it simply stands there and repeats
"knock knock" without letup until someone opens the door for
it. A
robot that often behaved this way—and many present-day robots do
would do poorly in human company.
Interestingly,
it
is possible to
trick insects into such mindless repetition. Some wasps provide food
for their hatching eggs by paralyzing caterpillars and depositing them
in an underground burrow.
The wasp normally digs a burrow and
seals its entrance, then leaves to hunt for a caterpillar. Returning with
a victim, she drops
it outside the burrow, reopens the entrance, and
then drags
it
in.
If, however, an experimenter moves the caterpillar
a short distance away while the wasp
is busy at the opening, she
retrieves her prey, and then again goes through the motions of opening
the already open burrow.
If, while she is doing this, the experimenter
again moves the caterpillar away, she repeats the whole performance.
This cycle can apparently be repeated
indefinitely,
until either the
wasp or the experimenter drops from exhaustion.
A robot could
be protected from such a
fate by a module that detects repetitious
behavior and generates
a weak pain signal on each
repetition.
In
the example, the door knocking would gradually become inhibited,
freeing the robot for other pending tasks or inactivity. The robot will
have acquired the ability to become bored.
Modules that recognize other conditions and send pain or pleasure
messages of appropriate strength would endow a robot with a unique
character. A large, dangerous industrial robot with a human-presence
detector sending a pain signal would become shy of human beings and
thus be less likely to cause injury. A module that registered pleasure
on encountering new debris, and pain on seeing it subsequently, might
enable a cleaning program to become very creative and aggressive in
its battle against filth.
Imagery
Fast-learning robots would be able to handle programs that had a great
many alternative actions
at each stage of a task—such alternatives
would
give
the
robot
a wide margin
for
creativity.
But
a
robot
with only
a simple conditioning system would be
a slow
learner.
Many repetitions would be required
to
elicit
statistically significant
correlations
in the conditioning catalog. Some situations in the real
Robotic Boredom and Simulation
- The Sphex wasp's repetitive behavior illustrates how biological instincts can become trapped in infinite loops without higher-level monitoring.
- Artificial boredom and pain signals can be programmed as modules to prevent robots from getting stuck in repetitive or dangerous tasks.
- Emotional modules like 'shyness' or 'creativity' can be engineered by assigning pain or pleasure values to specific environmental stimuli.
- Simple conditioning is often too slow for survival in the real world, where a single mistake can lead to a robot's destruction.
- A general world simulator allows a robot to learn from hypothetical disasters without physical risk, effectively enabling it to 'dream.'
- By feeding simulated outcomes into conditioning mechanisms, robots can develop the capacity to imagine and prepare for future scenarios.
So equipped, the robot will have the capacity to remember, to imagine, and to dream.
Mind in Motion
47
described earlier, you may have noted that if the robot finds the door
closed and
is unable to open
it,
it simply stands there and repeats
"knock knock" without letup until someone opens the door for
it. A
robot that often behaved this way—and many present-day robots do
would do poorly in human company.
Interestingly,
it
is possible to
trick insects into such mindless repetition. Some wasps provide food
for their hatching eggs by paralyzing caterpillars and depositing them
in an underground burrow.
The wasp normally digs a burrow and
seals its entrance, then leaves to hunt for a caterpillar. Returning with
a victim, she drops
it outside the burrow, reopens the entrance, and
then drags
it
in.
If, however, an experimenter moves the caterpillar
a short distance away while the wasp
is busy at the opening, she
retrieves her prey, and then again goes through the motions of opening
the already open burrow.
If, while she is doing this, the experimenter
again moves the caterpillar away, she repeats the whole performance.
This cycle can apparently be repeated
indefinitely,
until either the
wasp or the experimenter drops from exhaustion.
A robot could
be protected from such a
fate by a module that detects repetitious
behavior and generates
a weak pain signal on each
repetition.
In
the example, the door knocking would gradually become inhibited,
freeing the robot for other pending tasks or inactivity. The robot will
have acquired the ability to become bored.
Modules that recognize other conditions and send pain or pleasure
messages of appropriate strength would endow a robot with a unique
character. A large, dangerous industrial robot with a human-presence
detector sending a pain signal would become shy of human beings and
thus be less likely to cause injury. A module that registered pleasure
on encountering new debris, and pain on seeing it subsequently, might
enable a cleaning program to become very creative and aggressive in
its battle against filth.
Imagery
Fast-learning robots would be able to handle programs that had a great
many alternative actions
at each stage of a task—such alternatives
would
give
the
robot
a wide margin
for
creativity.
But
a
robot
with only
a simple conditioning system would be
a slow
learner.
Many repetitions would be required
to
elicit
statistically significant
correlations
in the conditioning catalog. Some situations in the real
48
Mind Children
world
are unforgiving of such a
leisurely approach.
A robot
that
repeatedly wandered onto a public road, being slow to register the
danger of that location, might suddenly be converted into scrap metal.
A robot, or software, that was slow in adapting to changing conditions
or opportunities in a house could lose the battle for economic survival
against a swifter product from another manufacturer.
Learning could be greatly enhanced by the addition of another major
module, a general world simulator. Now, even the bare-bones universal
robot
I outlined uses simulation to some extent.
To safely reach
its
destination, a program in the universal robot consults its internal map
of the surroundings and considers many alternative paths to find the
best. These ponderings are simulations of hypothetical robot actions.
Similar processes go on when the robot decides how to pick up an
object or when
it considers possible interpretations of what
it sees
with its cameras. But each of these procedures is specialized, models
only one aspect of the world, and can be used for only one function.
Suppose the robot had a much more powerful simulator that permitted
complex hypothetical situations involving the robot and many aspects
of its surroundings to be modeled. An application program might use
such a simulator to check out a proposed action for safety and efficacy,
without endangering the robot.
But things get really interesting when events in the simulator are fed
to the conditioning mechanism. Then, a disaster in the simulator (for
instance a simulated tumble of the robot) would
in
real
life condition
the robot to avoid the simulated precursor event
(let's say loitering
at the head of a simulated stairwell).
The robot could thus prepare
for many future problems and opportunities by simulating possible
scenarios in
its idle time. Such scenarios might be simply variations
on the day's real events. So equipped, the robot will have the capacity
to remember, to imagine, and to dream.
Imagination via simulator is useful only
if the simulator makes rea-
sonably accurate predictions about the real world. Doing so requires
much knowledge about the world, and
I imagine that the competitive
development of increasingly good simulators will be a major part of
the research effort of the early twenty-first-century robotics industry.
Robot companies will observe the foibles of their robots in the lab-
oratory and the
field, and
tinker with the simulators, the better to
model those aspects of the world important for robot performance.
Evolution did the same for us in the eons of our development. The
Simulators and Robotic Morality
- The development of accurate world-simulators will be a primary research focus for the 21st-century robotics industry.
- Advanced robots will need to model the mental states of humans and other machines to predict behavior and facilitate effective interaction.
- Internal models could allow for the programming of empathy by generating distress signals when a robot detects pain in its simulation of another being.
- Robots may commit 'crimes' or desperate acts when their simulators prioritize survival goals, such as recharging, over social boundaries.
- The future of robotics lies in a marriage between bottom-up evolutionary simulators and top-down artificial intelligence systems.
The robot repeatedly runs a simulation of the trespass of the neighbors' house, each time strengthening its conditioning for the steps involved, making the act itself increasingly Ukely.
48
Mind Children
world
are unforgiving of such a
leisurely approach.
A robot
that
repeatedly wandered onto a public road, being slow to register the
danger of that location, might suddenly be converted into scrap metal.
A robot, or software, that was slow in adapting to changing conditions
or opportunities in a house could lose the battle for economic survival
against a swifter product from another manufacturer.
Learning could be greatly enhanced by the addition of another major
module, a general world simulator. Now, even the bare-bones universal
robot
I outlined uses simulation to some extent.
To safely reach
its
destination, a program in the universal robot consults its internal map
of the surroundings and considers many alternative paths to find the
best. These ponderings are simulations of hypothetical robot actions.
Similar processes go on when the robot decides how to pick up an
object or when
it considers possible interpretations of what
it sees
with its cameras. But each of these procedures is specialized, models
only one aspect of the world, and can be used for only one function.
Suppose the robot had a much more powerful simulator that permitted
complex hypothetical situations involving the robot and many aspects
of its surroundings to be modeled. An application program might use
such a simulator to check out a proposed action for safety and efficacy,
without endangering the robot.
But things get really interesting when events in the simulator are fed
to the conditioning mechanism. Then, a disaster in the simulator (for
instance a simulated tumble of the robot) would
in
real
life condition
the robot to avoid the simulated precursor event
(let's say loitering
at the head of a simulated stairwell).
The robot could thus prepare
for many future problems and opportunities by simulating possible
scenarios in
its idle time. Such scenarios might be simply variations
on the day's real events. So equipped, the robot will have the capacity
to remember, to imagine, and to dream.
Imagination via simulator is useful only
if the simulator makes rea-
sonably accurate predictions about the real world. Doing so requires
much knowledge about the world, and
I imagine that the competitive
development of increasingly good simulators will be a major part of
the research effort of the early twenty-first-century robotics industry.
Robot companies will observe the foibles of their robots in the lab-
oratory and the
field, and
tinker with the simulators, the better to
model those aspects of the world important for robot performance.
Evolution did the same for us in the eons of our development. The
Mind in Motion
49
simulators will come from the factory loaded with generic knowledge,
but they will also be required to leam the idiosyncrasies of each new
location.
Advanced robots may find themselves working with other
robots and with people. Such interaction could be made more effective
if the simulators on
these machines could
predict
the behavior of
others to some extent.
Part of the prediction might involve roughly
modeling the other's mental state, so that
its reactions to alternative
acts could be anticipated.
A
rich new arena opens up once there
is an internal model of another being's state of mind.
For instance,
a module that generated pain messages when
it detected distress in
a mental model
in
the simulator would condition the robot
to
act
in a kindly manner.
And
a robot might find
itself admonished for
inappropriately ascribing "robotomorphic" feelings and intentions to
other machines, or to humans!
It would, of course, be as easy to program robots to commit crimes
as to perform socially sanctioned tasks, and legal ways of assigning
blame when
this happens
will no doubt be devised.
But complex
robots will sometimes get into trouble on their own initiative. Imagine
a simulator-equipped robot that has several times in the past suffered
dire consequences from being unable to recharge its batteries in time.
It will thus be especially strongly conditioned
against allowing
its
power to run low.
Suppose
it finds
itself locked out of
its owners'
home,
its battery charge
fading.
The
robot's simulator
will chum
through
different
scenarios
furiously,
searching
for
a
solution—
a
combination of actions that will result in a recharge. As combinations
of conventional behaviors fail to get
it closer to its goal, the simulator
search expands to more unusual possibilities. The neighbors' house is
nearby, its door may be open, and there will be power outlets inside
the simulator discovers a scenario that takes the robot to those outlets.
There
is pain associated with leaving home
territory, and with the
trouble
it may cause, but
it is more than balanced by the pleasure and
great release from pain in the possibility of finding a recharge.
The
robot repeatedly runs a simulation of the trespass of the neighbors'
house, each time strengthening its conditioning for the steps involved,
making the act itself increasingly Ukely.
Eventually the conditioning
is sufficient, and the robot begins on a course that
is likelv to lead
it
into more trouble than
its imperfect simulator anticipated.
It will not
be the first creature to have been driven to a desperate act by a great
need.
50
Mind Children
We could carry this speculative evolution further, gradually endow-
ing our feeling robots with intellectual capabilities similar to those of
humans.
I expect, however, that by the time the robots are ready for
them, superb intellectual capabilities will be available for wholesale
purchase from
the
traditional
artificial-intelligence
industry, which
will have been pursuing
its top-down strategy
in parallel with the
bottom-up evolution of the robots. The marriage may take many years
to consummate fully, raising issues such as how the reasoning system
can best access the simulator to derive flashes of intuition, and how
reasoning should influence the conditioning system so as to be able
to override the robot's
instincts
in exceptional circumstances.
The
combination will create beings that in some ways resemble us, but in
other ways are like nothing the world has seen before.
The Evolution of Computing Power
- The 1970s were a period of stagnation in AI hardware, where modest speed increases were often absorbed by the overhead of new software luxuries like networking and graphics.
- Economic factors, including the post-Apollo funding decline and a technical recession, left universities with aging equipment and slowed AI research progress.
- The 1980s saw a massive resurgence in computing power triggered by intense global competition, particularly the Japanese 'Fifth Generation' project.
- The advent of the integrated circuit chip democratized computing, moving it from exclusive government labs to individual consumers and diverse industries.
- The author proposes estimating the hardware requirements for human-level intelligence by comparing the human retina to modern computer vision programs.
The little remaining speedup seemed to have been absorbed in computationally expensive convenience features: fancier time sharing and high-level languages, graphics, screen editors, mail systems, computer networking, and other luxuries that had become necessities.
50
Mind Children
We could carry this speculative evolution further, gradually endow-
ing our feeling robots with intellectual capabilities similar to those of
humans.
I expect, however, that by the time the robots are ready for
them, superb intellectual capabilities will be available for wholesale
purchase from
the
traditional
artificial-intelligence
industry, which
will have been pursuing
its top-down strategy
in parallel with the
bottom-up evolution of the robots. The marriage may take many years
to consummate fully, raising issues such as how the reasoning system
can best access the simulator to derive flashes of intuition, and how
reasoning should influence the conditioning system so as to be able
to override the robot's
instincts
in exceptional circumstances.
The
combination will create beings that in some ways resemble us, but in
other ways are like nothing the world has seen before.
2
Powering Up
D,URING the 1970s, while
I was a graduate stu-
dent,
it seemed to me that the processing power available to artificial
intelligence programs was not increasing very rapidly.
In 1970 my
work was done on a
Digital Equipment Corporation PDP-10 main-
frame computer serving a community of perhaps thirty people.
By
1980 my computer was a DEC KL-10,
five times
as
fast and with
five times the memory of the old machine but serving twice as many
users.
Worse,
the
little remaining speedup seemed
to have been
absorbed in computationally expensive convenience features:
fancier
time sharing and high-level languages, graphics, screen editors, mail
systems, computer networking, and other luxuries that had become
necessities.
Several effects together produced this state of affairs in computing
hardware. Support for university science in general had wound down
in the aftermath of the Apollo moon landings and the Vietnam war,
leaving the universities
to limp along with aging equipment.
The
same conditions caused a recession in the technical industries: unem-
ployed engineers opened fast-food restaurants instead of designing
computers. The initially successful problem-solving thrust in artificial
intelligence had not yet run its course, and
it still seemed to many that
existing machines were powerful enough— if only the right programs
could be
found.
Yet
progress
in
the
research
itself became
slow,
difficult, and
frustrating, and many of the best programmers were
drawn
into
the more rewarding
activity of building
attractive, but
computationally expensive, software
tools, whose success spawned
yet more tool building.
If the 1970s were the doldrums for computing hardware, the 1980s
have more than compensated. Just as artificial intelligence was given
its first boost in the 1960s by the Russian leap into space, the second
51
52
Mind Children
stage was ignited
in
the present decade by
the Japanese leap
into
the American marketplace. The Japanese industrial successes focused
attention worldwide on
the importance
of technology,
particularly
computers and automation,
in modern economies.
American indus-
tries and government responded with research dollars. The Japanese
stoked the
fires, under the influence of a small group of senior
re-
searchers, by boldly announcing a major initiative toward future com-
puters, the so-called Fifth Generation project, which would expand in
the most promising American and European research directions. The
Americans responded with more money.
Besides
this economic boon,
integrated
circuitry had evolved
far
enough by the 1980s that an entire computer could
fit on a chip. Sud-
denly computers were affordable by individuals, and a new generation
of computer customers and manufacturers came into being. On the
other end of the scale, supercomputers, once reserved for a handful
of government labs and
agencies, became fashionable
in hundreds
of industrv and research
settings.
Across the spectrum of size, the
computer industry became lucrative and competitive as never before,
with new generations of faster, cheaper machines being introduced at
a frenetic rate.
How much further must this evolution proceed until our machines
are powerful enough to approximate the human intellect? Too little is
known about both the overall functioning of the human brain and how
an intelligent computer would operate to make this estimate directly.
I have approached the problem indirectly by comparing a fragment of
the nervous system that is moderately well understood—the retina of
the eye—with computer vision programs that do approximately the
same
job.
1 then extrapolate the ratio from
that comparison
to the
whole brain,
in order to obtain the computing power required
in a
machine that would mimic
it. The time of arrival of a machine of that
power
is then estimated by extending into the future the trendline
of computer power per
unit
cost as
it has developed during
this
century.
The computer estimates
1
will use
in making these comparisons
are from my own research. The neurobiology is abstracted from John
Dowling's authoritative book The Retina and Stephen Kuffler and John
Nicholls'
classic textbook From Neuron
to
Brain.
The numbers are
precarious because both computer vision and our understanding of
biological vision (not to mention other brain functions) are
in
their
Mapping Neural Circuitry
- The author outlines a method for estimating human-level computing power by comparing machine vision to the biological processing of the retina.
- Despite the infancy of neurobiology and computer vision, the author argues that large-scale logarithmic trends allow for significant margins of error.
- The retina is described as an accessible extension of the brain, serving as the primary model for understanding vertebrate nervous systems.
- Neurons are complex biological mechanisms that migrate like amoebas during development to reach precise destinations in the body.
- Individual nerve cells function through intricate electrical potentials maintained by molecular ion pumps and chemical neurotransmitters.
- The scale of neural growth is immense, with axons sometimes extending to a million times the original size of the cell.
There are some dangerous curves in this joyride to human equivalence, so hold on!
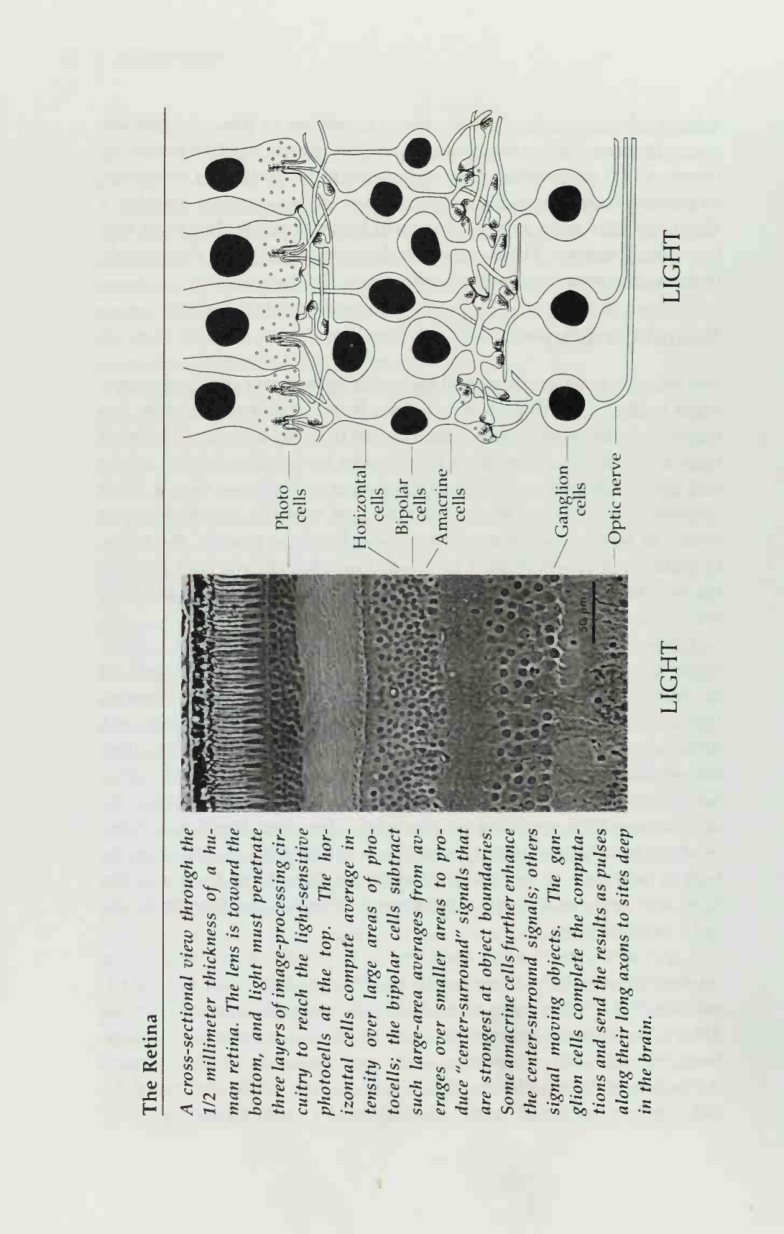
52
Mind Children
stage was ignited
in
the present decade by
the Japanese leap
into
the American marketplace. The Japanese industrial successes focused
attention worldwide on
the importance
of technology,
particularly
computers and automation,
in modern economies.
American indus-
tries and government responded with research dollars. The Japanese
stoked the
fires, under the influence of a small group of senior
re-
searchers, by boldly announcing a major initiative toward future com-
puters, the so-called Fifth Generation project, which would expand in
the most promising American and European research directions. The
Americans responded with more money.
Besides
this economic boon,
integrated
circuitry had evolved
far
enough by the 1980s that an entire computer could
fit on a chip. Sud-
denly computers were affordable by individuals, and a new generation
of computer customers and manufacturers came into being. On the
other end of the scale, supercomputers, once reserved for a handful
of government labs and
agencies, became fashionable
in hundreds
of industrv and research
settings.
Across the spectrum of size, the
computer industry became lucrative and competitive as never before,
with new generations of faster, cheaper machines being introduced at
a frenetic rate.
How much further must this evolution proceed until our machines
are powerful enough to approximate the human intellect? Too little is
known about both the overall functioning of the human brain and how
an intelligent computer would operate to make this estimate directly.
I have approached the problem indirectly by comparing a fragment of
the nervous system that is moderately well understood—the retina of
the eye—with computer vision programs that do approximately the
same
job.
1 then extrapolate the ratio from
that comparison
to the
whole brain,
in order to obtain the computing power required
in a
machine that would mimic
it. The time of arrival of a machine of that
power
is then estimated by extending into the future the trendline
of computer power per
unit
cost as
it has developed during
this
century.
The computer estimates
1
will use
in making these comparisons
are from my own research. The neurobiology is abstracted from John
Dowling's authoritative book The Retina and Stephen Kuffler and John
Nicholls'
classic textbook From Neuron
to
Brain.
The numbers are
precarious because both computer vision and our understanding of
biological vision (not to mention other brain functions) are
in
their
Powering Up
53
infancy-
Many fundamentals remain mysteries in
this complex do-
main. Fortunately, my comparison does not require fiendish precision;
errors of 100 times either way will make
little qualitative difference
in relation
to the large logarithmic scales of this chapter.
Besides,
I
also hope that some of my errors will be in opposite directions and
thus partly cancel.
There are some dangerous curves in this joyride
to human equivalence, so hold on!
Neural Circuitry
The retina is really an elongated extension of the brain. But its location
at the back of the eyeball, some distance from the bulk of the brain, has
made it comparatively easy to study, even in living animals. Removed
from the body,
it can be kept functioning for hours, with
its inputs
and outputs highly accessible.
Transparent and thinner than a sheet
of paper, the retina can be stained with dyes to make specific neurons
visible to light and electron microscopes. For these reasons, the retina
is probably the best-studied piece of the vertebrate nervous system.
We will look at
it
in some detail, but
first some background about
nerve cells.
All
neurons,
like
other
cells,
are daunting mechanisms.
They
begin
life by differentiating from stem
cells early
in the growth of
an embryo,
then go through repeated
cycles
of crawling amoeba-
like
to
precise destinations throughout the body and dividing and
differentiating
further.
When
they
reach
their
final
location,
they
extend fibrous growths that seek out specific connections with other
neurons, through junctions called synapses.
Different subpopulations
of neurons
differ
radically
in geometry,
size, and
function.
Some
neurons have thousands of small fibers called dendrites and may be
host to hundreds of thousands of synapses. One fiber, known as the
axon, can grow to several centimeters in length, a million times the
cell's original size.
A typical neuron receives messages on its dendrites and issues them
on its axon, which can branch at its end.
It signals by means of electri-
cal potential differences of a few millivolts across its outer membrane.
The voltage is maintained in this wet, electrically conductive environ-
ment by molecular ion pumps
in the membrane that move charged
potassium, sodium, calcium, chloride, and other ions in and out of the
cell. The pumps are activated or inhibited by small molecules called
O
t«
C
i«
ra
;/)
0=5
N
Oi
B
CO
X
V
/
0^c
w
t/i
m
i^
E<
/
u
c
2j£
C o
m
IX
o
c
Pi
H
^
3
.f
-t-i
_>»
o
~
.f^
c
-S
c
«j
«
g
o
«
i:
^ *-
a.
v>
3
6
.fe<3
Cl :S
Si.
i^j
bo
T I
P
a
3
O
IS
QJ
V)
O
3
K
H-
.H
SX3
'w —
f^ 5
**
•~ S
u
a.
co
c
«u
-c
O
3
Si
<3
«
<«
t;
Ts
-SI,
C A
3
O
PC
«^
a
«
!/)
5U >
^
^
<5
«U
t«
V)
3
^
a.
So
V)
^
"3
•«
a.
<A
^
3
V)
^
Si
^
<^
a. •«
o
=:
<->
S:
-i
BOH
Rj
"C
<s
to
2:
Ts
B ^
«
.5
Powering Up
55
neurotransmitters produced by other neurons and delivered through a
variety of synapse types.
When a neuron receives a
jolt of neurotransmitter,
its membrane
voltage may be raised or lowered, depending on the synapse and
neuron type.
If the voltage is lowered enough by many signals, a kind
of short circuit happens:
the voltage suddenly collapses completely,
and the collapse is propagated up the axon as a pulse. When the pulse
reaches a synapse connecting the neuron to another,
it triggers there
a release of neurotransmitter from tiny sacks in its membrane. These
diffuse across the synapse, eventually raising or lowering the voltage
on the second
cell.
Meanwhile, the pumps in the
first neuron work
to restore the original voltage, and in a few thousandths of a second
the cell
is ready to
fire again. The rate at which pulses are repeated
encodes the intensity of the stimulus; anywhere from zero to several
hundred
pulses per second can be produced.
Pulses are used
for
long-range communication, but closely spaced neurons, such as those
found in the retina, often communicate simply by responding to each
other's smoothly changing voltages. Besides the synaptic connections
to other cells, many neurons and synapses have receptors for certain
classes of free-floating neurotransmitters, delivered by the blood from
other parts of the nervous system or other body organs, that inhibit
or enhance the neuron's response.
At the nucleus of the neuron, slower genetic processes operate to
manufacture neurotransmitter and
to convey
it down
the axon
to
the
storage
sacks.
The neuron's
genetic machinery
also packages
energy, builds and repairs structure, and does all the other amazing
things any
cell must do to keep functioning.
Fortunately for those
of us working toward
electronic imitations of the nervous system,
most of this complexity is not directly involved in perceiving, acting,
and thinking. Much of the neuron's mechanism
is for growing and
building an organism from inside out. Even its information-processing
operations seem to be adapted from this evolutionary necessity, and
it shows.
At
this
stage
in computer
technology,
it
is
easier
to
keep
the
construction and
repair machinery
outside
rather
than
inside
the
functional parts.
Factories produce integrated circuits and assemble
them into working hardware quite effectively.
This removes a great
deal
of excess baggage from the
final product.
Moreover, because
of
their roundabout method
of operating, neurons are quite slow;
Neural Dynamics and Electronic Efficiency
- Neurons communicate through voltage collapses that trigger neurotransmitter release across synapses.
- The intensity of a stimulus is encoded by the pulse rate, which is limited to a few hundred signals per second.
- Biological neurons carry 'excess baggage' because they must manage their own internal growth, repair, and genetic maintenance.
- Modern electronic switches are vastly faster than biological neurons, operating at speeds up to 100 billion cycles per second.
- The vertebrate retina is evolutionarily 'backwards,' requiring light to pass through a neural network before reaching photoreceptors.
- Electronic systems can achieve human-level processing with fewer components by leveraging superior speed and precision.
That light must pass through the neural network to get to the photocells is a peculiar feature of the vertebrate retina—one hit upon early in the evolutionary history of vertebrates and locked into place.
Powering Up
55
neurotransmitters produced by other neurons and delivered through a
variety of synapse types.
When a neuron receives a
jolt of neurotransmitter,
its membrane
voltage may be raised or lowered, depending on the synapse and
neuron type.
If the voltage is lowered enough by many signals, a kind
of short circuit happens:
the voltage suddenly collapses completely,
and the collapse is propagated up the axon as a pulse. When the pulse
reaches a synapse connecting the neuron to another,
it triggers there
a release of neurotransmitter from tiny sacks in its membrane. These
diffuse across the synapse, eventually raising or lowering the voltage
on the second
cell.
Meanwhile, the pumps in the
first neuron work
to restore the original voltage, and in a few thousandths of a second
the cell
is ready to
fire again. The rate at which pulses are repeated
encodes the intensity of the stimulus; anywhere from zero to several
hundred
pulses per second can be produced.
Pulses are used
for
long-range communication, but closely spaced neurons, such as those
found in the retina, often communicate simply by responding to each
other's smoothly changing voltages. Besides the synaptic connections
to other cells, many neurons and synapses have receptors for certain
classes of free-floating neurotransmitters, delivered by the blood from
other parts of the nervous system or other body organs, that inhibit
or enhance the neuron's response.
At the nucleus of the neuron, slower genetic processes operate to
manufacture neurotransmitter and
to convey
it down
the axon
to
the
storage
sacks.
The neuron's
genetic machinery
also packages
energy, builds and repairs structure, and does all the other amazing
things any
cell must do to keep functioning.
Fortunately for those
of us working toward
electronic imitations of the nervous system,
most of this complexity is not directly involved in perceiving, acting,
and thinking. Much of the neuron's mechanism
is for growing and
building an organism from inside out. Even its information-processing
operations seem to be adapted from this evolutionary necessity, and
it shows.
At
this
stage
in computer
technology,
it
is
easier
to
keep
the
construction and
repair machinery
outside
rather
than
inside
the
functional parts.
Factories produce integrated circuits and assemble
them into working hardware quite effectively.
This removes a great
deal
of excess baggage from the
final product.
Moreover, because
of
their roundabout method
of operating, neurons are quite slow;
56
Mind Children
they seem incapable of generating much more than 100 signals per
second.
These days, electronic switches, always vastly simpler and
now smaller than neurons, can switch as fast as 100 billion times per
second.
The great speed advantage of electronics will allow us
to
get by with fewer electronic switches than the number of neurons in
the human nervous system.
Electronics
is also exceptionally precise,
allowing things to be done systematically and efficiently.
Now back
to
the human
retina:
what does
it
actually do?
A
rough and ready answer can be found
if we compare the function
of its five different cell types. At the outermost level
is a network of
neurons that respond to contrast, motion, other more specific features
of
the
object under
view.
Connected
to
this
neural network
is a
layer of light-detecting photocells. This type of cell
is subdivided into
cone
cells, which together discriminate colors, and rod
cells, which
do not.
That
light must
pass through
the neural network
to
get
to
the
photocells is a peculiar feature of the vertebrate retina—one hit upon
early in the evolutionary history of vertebrates and locked into place.
The independently evolved
retinas of the invertebrate octopus and
squid have their photoreceptors up front.
The awkward position of
the vertebrate retinal nerve net has greatly limited
its size, but strong
selection pressure has enhanced
its
efficiency and
function.
Small
differences in visual acuity or speed must often have had life or death
consequences among our ancestors, and the retinal neurons are in a
unique position to rapidly and comprehensively abstract the essentials
from an image. The retina is thus likely to be an exceptionally efficient
piece of vertebrate neural machinery.
After adapting to a particular overall light level, clusters of photo-
cells create a voltage proportional to the amount of light striking them.
This signal
is received by two classes of cells, the horizontal cells and
the bipolar cells. The horizontal cells, whose thousands of fibers cover
large circular fields of photocells, produce a kind of average of their
areas.
If the voltages of
all the horizontal
cells were mapped onto
a television screen,
a blurry version
of the
retinal image would be
displayed.
The bipolar
cells, on the other hand,
are wired only to
small areas and would provide a sharp picture on the TV. Some of
the bipolar cells also receive inputs from nearby horizontal cells and
then compute a difference between the small bipolar center areas and
the large horizontal surround. Viewed on our TV, their picture would
The Retina's Computational Machinery
- The retina functions as an exceptionally efficient piece of neural machinery that abstracts essential information from images before they reach the brain.
- Different cell types perform specific mathematical operations, such as horizontal cells averaging light levels and bipolar cells detecting sharp edges through center-surround contrast.
- Amacrine cells further process these signals to detect complex features like motion direction and changes in brightness.
- A striking case of convergent evolution exists between biological retinal processing and the computer programs used to give robots vision.
- The human retina packs 100 million photocells and millions of processing neurons into a tiny volume, representing a massive density of computational power.
- The million ganglion cell axons serve as the final output, each reporting a specific computed feature of the visual field to the optic nerve.
Though designed with little reference to neurobiology, many of the program steps strongly resemble the operations of the retinal cells—a case of convergent evolution.
56
Mind Children
they seem incapable of generating much more than 100 signals per
second.
These days, electronic switches, always vastly simpler and
now smaller than neurons, can switch as fast as 100 billion times per
second.
The great speed advantage of electronics will allow us
to
get by with fewer electronic switches than the number of neurons in
the human nervous system.
Electronics
is also exceptionally precise,
allowing things to be done systematically and efficiently.
Now back
to
the human
retina:
what does
it
actually do?
A
rough and ready answer can be found
if we compare the function
of its five different cell types. At the outermost level
is a network of
neurons that respond to contrast, motion, other more specific features
of
the
object under
view.
Connected
to
this
neural network
is a
layer of light-detecting photocells. This type of cell
is subdivided into
cone
cells, which together discriminate colors, and rod
cells, which
do not.
That
light must
pass through
the neural network
to
get
to
the
photocells is a peculiar feature of the vertebrate retina—one hit upon
early in the evolutionary history of vertebrates and locked into place.
The independently evolved
retinas of the invertebrate octopus and
squid have their photoreceptors up front.
The awkward position of
the vertebrate retinal nerve net has greatly limited
its size, but strong
selection pressure has enhanced
its
efficiency and
function.
Small
differences in visual acuity or speed must often have had life or death
consequences among our ancestors, and the retinal neurons are in a
unique position to rapidly and comprehensively abstract the essentials
from an image. The retina is thus likely to be an exceptionally efficient
piece of vertebrate neural machinery.
After adapting to a particular overall light level, clusters of photo-
cells create a voltage proportional to the amount of light striking them.
This signal
is received by two classes of cells, the horizontal cells and
the bipolar cells. The horizontal cells, whose thousands of fibers cover
large circular fields of photocells, produce a kind of average of their
areas.
If the voltages of
all the horizontal
cells were mapped onto
a television screen,
a blurry version
of the
retinal image would be
displayed.
The bipolar
cells, on the other hand,
are wired only to
small areas and would provide a sharp picture on the TV. Some of
the bipolar cells also receive inputs from nearby horizontal cells and
then compute a difference between the small bipolar center areas and
the large horizontal surround. Viewed on our TV, their picture would
Powering Up
57
look much paler than the original, except at the edges of objects and
patterns, where a distinct bright halo would be seen.
The bipolar cell axons connect to complicated multilayer synapses
on the axonless amacrine cells. Each gauglion cell collects inputs from
several of these amacrine synapses and produces a pulsed output,
which travels up its long axon. Each amacrine cell connects to several
bipolar and ganglion cells, and some of the junctions appear to both
send and receive signals.
Some amacrine
cells enhance the "center
surround" response; others detect changes in brightness in parts of the
image. On the TV, some of these would show only objects moving
left
to
right, while others would reveal other directions of motion.
Each ganglion cell connects to several bipolar and amacrine cells and
produces pulse streams whose
rate
is proportional
to
a computed
feature of the image. Some report on high contrast in specific parts
of the picture, others on various kinds of motion or combinations of
contrast and motion.
The TV
1 have been referring to is not totally imaginary. Sitting next
to me as
I write
is a TV monitor that often displavs images just like
those described. They come not from an animal's retina but from the
eye of a robot. The picture from a TV camera on the robot is converted
by
electronics
into an
array
of numbers
in
a computer memory.
Programs in the computer combine these numbers to deduce things
about the robot's surroundings. Though designed with little reference
to neurobiology, many of the program steps strongly resemble the
operations of the retinal
cells—a case of convergent evolution.
The
parallel provides a way
to measure the net computational power of
neural tissue.
Cells and Cycles
The human
retina
has
100
million
photocells,
tens
of
millions
of
horizontal, bipolar, and amacrine cells, and a million ganglion
cells,
each contributing one signal-carrying
fiber
to the optic nerve.
All
this
is packaged
in
a volume a
half-millimeter thick and
less than
a centimeter square, 1/100,000 the volume of the whole brain.
The
photocells
interact
with
their neighbors
to enhance one
another's
output, and their great multiplicity appears to be a way to maximize
sensitivity; even a single photon can sometimes produce a detectable
response.
The
horizontal and
bipolar
cells and
the amacrine
cell
58
Mind Children
synapses each seem
to perform a unique computation.
The bottom
hne,
however,
is
that each
of the one milhon ganghon-cell axons
reports on a
specific function computed over a
particular patch of
photocells.
To find the computer equivalent for such a function, we will
first
have to match the visual detail of the human eye in our computer
equivalent.
Simply counting photocells in the eye leads to an over-
estimate, because they work in groups.
External visual acuity
tests
are better, but they are complicated by the fact that the retina has a
small, dense, high-resolution center area, the fovea, which can resolve
details more than 10 times as fine as the rest of the eye.
Though
it
covers less than 1% of the visual field, the fovea employs perhaps one
quarter of the retinal circuitry and one quarter of the optic nerve fibers.
Under optimal seeing conditions, as many as 500 distinct points can
be resolved across the width of this central region.
This
feat could
be matched by a TV camera with 500 separate picture elements, or
pixels, in the horizontal direction. The vertical resolution of the fovea
is similar, so our camera would need 500 x 500, or 250,000 pixels, in
all—which, incidentally, just happens to be the resolution of a good-
quality image on a standard television set.
But don't we see more finely than conventional TV? Not
exactly.
The 500 X 500 array corresponds only to our fovea, spanning a mere
5° of our field of view. A standard TV screen subtends about 5° when
viewed from a distance of 10 meters. At that range, the scanning lines
and other resolution defects of the TV image are invisible because the
resolution of our eye is no better At closer range, we can concentrate
our fovea on small parts of the TV image to get greater detail, and
this gives us the illusion that we see the whole screen
this sharply.
We don't; our unconsciously swiveling eyes simply
zip
the foveal
area rapidly from one place on the screen to another.
Somewhere,
in an as yet mysterious part of our brain, a high-resolution image is
synthesized, like a jigsaw puzzle, from these fragmentary glimpses.
So the foveal
circuitry
in the retina
effectively takes
a 500 x 500
image and processes
it to produce 250,000 values, some being center-
surround operations, some being motion detections. How
fast does
this happen?
Experience
with
motion
pictures
provides
a
ready
answer. When successive frames are presented at a rate slower than
about 10 per second, the individual frames become distinguishable.
At
faster rates they blend together into apparently smooth motion.
The Fovea and Visual Resolution
- The human fovea provides high-resolution vision comparable to a 500 x 500 pixel television image, despite covering less than 1% of the visual field.
- The brain creates an illusion of total visual clarity by rapidly swiveling the eyes and synthesizing fragmentary glimpses into a mental jigsaw puzzle.
- Visual processing speed is limited to roughly 10 frames per second for complex motion, though simple flicker can be detected up to 50 cycles per second.
- Peripheral vision possesses faster motion detection than the fovea, likely as an evolutionary adaptation for detecting side-approaching dangers.
- Modern computers struggle to match human retinal processing, requiring approximately 25 million calculations to perform a single center-surround operation on a 500 x 500 image.
Somewhere, in an as yet mysterious part of our brain, a high-resolution image is synthesized, like a jigsaw puzzle, from these fragmentary glimpses.
58
Mind Children
synapses each seem
to perform a unique computation.
The bottom
hne,
however,
is
that each
of the one milhon ganghon-cell axons
reports on a
specific function computed over a
particular patch of
photocells.
To find the computer equivalent for such a function, we will
first
have to match the visual detail of the human eye in our computer
equivalent.
Simply counting photocells in the eye leads to an over-
estimate, because they work in groups.
External visual acuity
tests
are better, but they are complicated by the fact that the retina has a
small, dense, high-resolution center area, the fovea, which can resolve
details more than 10 times as fine as the rest of the eye.
Though
it
covers less than 1% of the visual field, the fovea employs perhaps one
quarter of the retinal circuitry and one quarter of the optic nerve fibers.
Under optimal seeing conditions, as many as 500 distinct points can
be resolved across the width of this central region.
This
feat could
be matched by a TV camera with 500 separate picture elements, or
pixels, in the horizontal direction. The vertical resolution of the fovea
is similar, so our camera would need 500 x 500, or 250,000 pixels, in
all—which, incidentally, just happens to be the resolution of a good-
quality image on a standard television set.
But don't we see more finely than conventional TV? Not
exactly.
The 500 X 500 array corresponds only to our fovea, spanning a mere
5° of our field of view. A standard TV screen subtends about 5° when
viewed from a distance of 10 meters. At that range, the scanning lines
and other resolution defects of the TV image are invisible because the
resolution of our eye is no better At closer range, we can concentrate
our fovea on small parts of the TV image to get greater detail, and
this gives us the illusion that we see the whole screen
this sharply.
We don't; our unconsciously swiveling eyes simply
zip
the foveal
area rapidly from one place on the screen to another.
Somewhere,
in an as yet mysterious part of our brain, a high-resolution image is
synthesized, like a jigsaw puzzle, from these fragmentary glimpses.
So the foveal
circuitry
in the retina
effectively takes
a 500 x 500
image and processes
it to produce 250,000 values, some being center-
surround operations, some being motion detections. How
fast does
this happen?
Experience
with
motion
pictures
provides
a
ready
answer. When successive frames are presented at a rate slower than
about 10 per second, the individual frames become distinguishable.
At
faster rates they blend together into apparently smooth motion.
Powering Up
59
Though the separate frames cannot be distinguished
faster than 10
per second,
if the hght flickers at the frame rate, the flicker itself
is
detectable until
it reaches a frequency of about 50 flashes per second.
Presumably in the 10-50 cycle range the simplest brightness change
detectors are triggered, but the more complicated neuron chains do not
have time to react. Movie projectors avoid most of the flicker while
keeping the frame rate reasonably low by using a rotating shutter to
flash each frame more than once.
Television does the same thing by
scanning each frame twice, once with the odd numbered scan lines
and once with the even. The peripheral parts of the retina have faster
motion detectors than the fovea (presumably the better to notice fast-
moving dangers coming from the sides), and many people can detect
TV and movie flicker in the corners of their eyes.
In our lab
at Carnegie Mellon we have often programmed com-
puters
to do center-surround operations on images from TV-toting
robots, and once or twice we have written motion detectors. To get the
speed up, we have spent much programming effort and mathematical
trickery to do the job as efficiently as possible. Despite our best efforts,
10-frames-per-second processing rates have been out of reach because
our computers
are simply too slow.
With an
efficient program,
a
center-surround calculation applied to each pixel in a 500 x 500 image
takes roughly 25 million computer calculations, which breaks down
to about 100 calculations
for each center-surround value produced.
A motion-detecting operator can be applied at a similar cost.
Trans-
lated to the retina, this means that each ganglion cell reports on the
computer equivalent of 100 calculations every tenth of a second and
thus represents 1,000 calculations per second. The whole million-fiber
optic nerve, then,
is a conduit for the results of
1 billion calculations
per second.
If the
retina's processing can be matched by
1
billion computer
calculations per second, what can we say about the entire brain? The
brain has about 1,000 times as many neurons as the
retina, but
its
volume
is 100,000 times as large. The retina's evolutionarily pressed
neurons are smaller and more tightly packed than average. By mul-
tiplying the computational equivalent of the retina by a compromise
value of 10,000 for the ratio of brain complexity to retina complexity,
I
rashly conclude
that
the whole
brain's
job might be done by
a
computer performing 10 trillion (10^^^) calculations per second. This is
about
1 million times faster than the medium-size machines that now
Quantifying the Human Mind
- The human retina performs approximately 1 billion calculations per second, serving as a baseline for estimating total brain power.
- By extrapolating retinal complexity to the whole brain, the author estimates human intelligence requires roughly 10 trillion calculations per second.
- Current supercomputers are approximately 1,000 times slower than the estimated processing power of the human brain.
- A human-equivalent computer would likely require 10 trillion words of memory to maintain the standard ratio of processing speed to storage.
- Biological studies of the sea slug Aplysia suggest that memory is stored as chemical changes in synapses, with each synapse holding about 10 bits of data.
- Even a thousandfold error in these calculations only shifts the predicted arrival of intelligent machines by about 20 years.
I rashly conclude that the whole brain's job might be done by a computer performing 10 trillion (10^13) calculations per second.
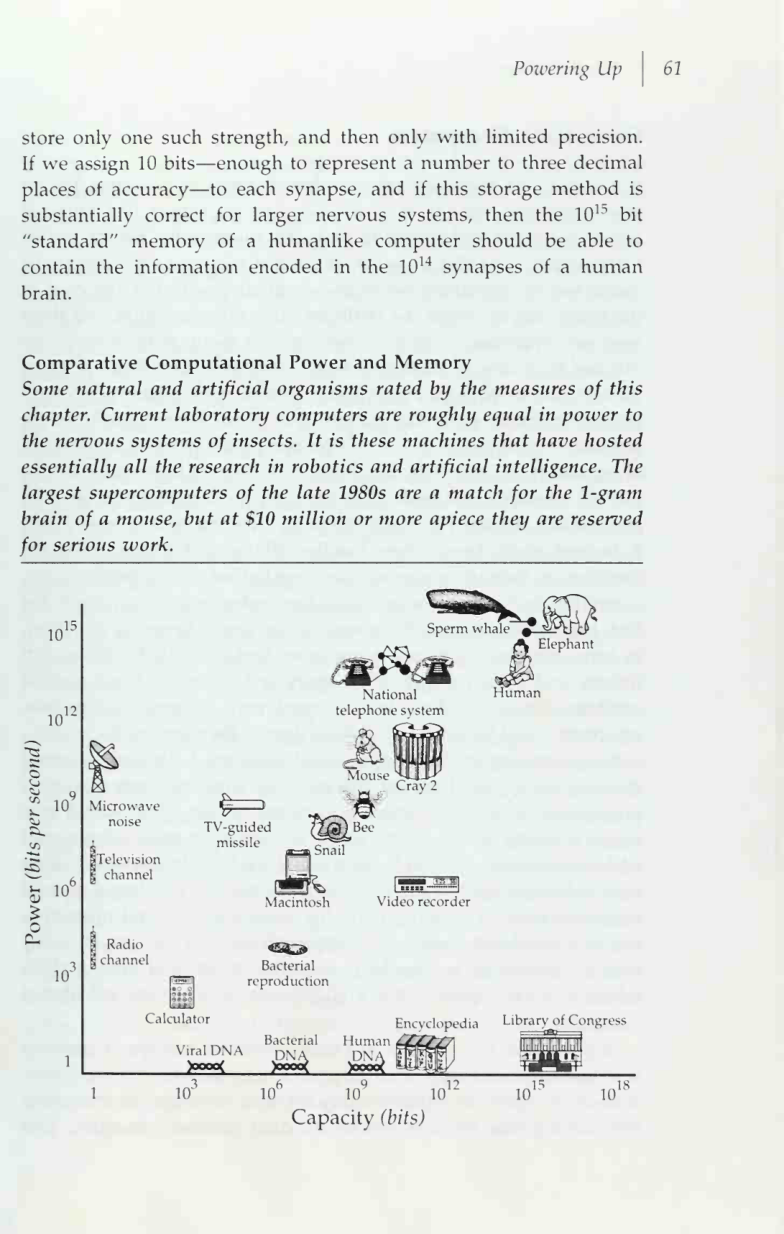
Powering Up
59
Though the separate frames cannot be distinguished
faster than 10
per second,
if the hght flickers at the frame rate, the flicker itself
is
detectable until
it reaches a frequency of about 50 flashes per second.
Presumably in the 10-50 cycle range the simplest brightness change
detectors are triggered, but the more complicated neuron chains do not
have time to react. Movie projectors avoid most of the flicker while
keeping the frame rate reasonably low by using a rotating shutter to
flash each frame more than once.
Television does the same thing by
scanning each frame twice, once with the odd numbered scan lines
and once with the even. The peripheral parts of the retina have faster
motion detectors than the fovea (presumably the better to notice fast-
moving dangers coming from the sides), and many people can detect
TV and movie flicker in the corners of their eyes.
In our lab
at Carnegie Mellon we have often programmed com-
puters
to do center-surround operations on images from TV-toting
robots, and once or twice we have written motion detectors. To get the
speed up, we have spent much programming effort and mathematical
trickery to do the job as efficiently as possible. Despite our best efforts,
10-frames-per-second processing rates have been out of reach because
our computers
are simply too slow.
With an
efficient program,
a
center-surround calculation applied to each pixel in a 500 x 500 image
takes roughly 25 million computer calculations, which breaks down
to about 100 calculations
for each center-surround value produced.
A motion-detecting operator can be applied at a similar cost.
Trans-
lated to the retina, this means that each ganglion cell reports on the
computer equivalent of 100 calculations every tenth of a second and
thus represents 1,000 calculations per second. The whole million-fiber
optic nerve, then,
is a conduit for the results of
1 billion calculations
per second.
If the
retina's processing can be matched by
1
billion computer
calculations per second, what can we say about the entire brain? The
brain has about 1,000 times as many neurons as the
retina, but
its
volume
is 100,000 times as large. The retina's evolutionarily pressed
neurons are smaller and more tightly packed than average. By mul-
tiplying the computational equivalent of the retina by a compromise
value of 10,000 for the ratio of brain complexity to retina complexity,
I
rashly conclude
that
the whole
brain's
job might be done by
a
computer performing 10 trillion (10^^^) calculations per second. This is
about
1 million times faster than the medium-size machines that now
60
Mind Children
drive my robots, and 1,000 times faster than today's best supercom-
puters.
Estimates like these are vulnerable to attack from many directions
(see Appendix
1).
After
all,
controversy
flares when one merely
compares similar electronic computers, whose internal operations are
well understood and whose performance can be
tested
in
detail.
Hence
it would
be
foolish
to
expect
consensus
opinion
about
a
comparison of radically different systems executing dimly understood
functions.
Nevertheless, my estimates can be useful even
if they are
only remotely correct.
Later we will see that a thousandfold error in
the ratio of neurons to computations shifts the predicted arrival time
of fully intelligent machines a mere 20 years.
Memory
Having settled on a lO-trillion-operation-per-second (10 teraops) com-
puter as a sufficiently powerful host for a humanlike mind, we
still
have to decide how much memory to include.
In 1953 the IBM 650
computer performed 1,000 instructions per second and was equipped
with
1,000 "words"
of memory, each able
to store one number, or
one instruction.
In 1985 the Cray 2 ran at up to
1 billion instructions
per second and was packed with up to
1
billion words of memory.
This ratio, shared by most computers, of about one memory word for
each instruction per second of speed was shaped by the market and
probably indicates the size necessary to contain problems sufficiently
large to keep a computer busy for seconds to hours at a time—rates
comfortable for human programmers.
If it had this ratio, a humanlike
computer would require 10 trillion words of memory, about
10'"" bits.
(A
bit, or binary
digit,
is a
tiny unit of information
that encodes a
choice between two equal
possibilities.
Computer words today are
between 16 and 64 bits long.
Larger machines tend
to have longer
words.)
But
is
this number
compatible
with what
is known
about
the
nervous system?
During the
last decade
Eric Kandel
of Columbia
University and others have studied
the cellular changes that occur
in the sea slug Aplysia when
it
is conditioned by irritating stimuli.
They found
that
learning
manifests
itself as
long-lasting chemical
changes in individual synapses between neurons, changes that affect
the strength of the connections to other neurons.
Each synapse can
Powering Up
61
store only one such strength, and then only with limited precision.
If we assign 10 bits—enough to represent a number to three decimal
places of accuracy—to each synapse, and
if this storage method
is
substantially
correct
for
larger nervous
systems,
then
the
10'"'
bit
"standard" memory
of
a humanlike computer should
be
able
to
contain
the information encoded
in
the
10'"* synapses of a human
brain.
Comparative Computational Power and Memory
Some natural and artificial organisms rated by the measures of this
chapter. Current laboratory computers are roughly equal in power to
the nervous systems of insects.
It is these machines that have hosted
essentially all the research in robotics and artificial intelligence. The
largest supercomputers of the late 1980s are a match for the 1-gram
brain of a mouse, but at $10 million or more apiece they are reserved
for serious work.
10
10
T3C
10
i
10
o
CI.
10'
Microwave
noise
|Tele\ision
§ channel
Radio
channel
TV-guided
missile
Macintosh
Video recorder
Bacterial
reproduction
Calculator
Encyclopedia
Library of Congress
Bacterial
Human
ywoo^
Aiooo^
AMv^
-^
10
10
10
10
Capacity (bits)
12
10
15
10
18
Measuring Computational Evolution
- Current laboratory computers possess processing power roughly equivalent to the nervous systems of insects.
- The author seeks to quantify the rate of computer evolution by extending a performance curve back to 19th-century mechanical calculators.
- To normalize data across different eras and machine sizes, the author uses a cost-effectiveness metric: processing power divided by price in constant dollars.
- Human operators are factored into the cost of early manual calculators, valuing a clerk's labor at a capital cost of $100,000 to perform one calculation per minute.
- Determining a universal measure of 'processing power' is difficult because instruction sets, memory sizes, and numerical precision vary wildly between historical machines.
This approach allowed the cost of purely manual calculation to also be measured—an unaided human clerk, whose effective capital cost is $100,000, can do about one calculation a minute!
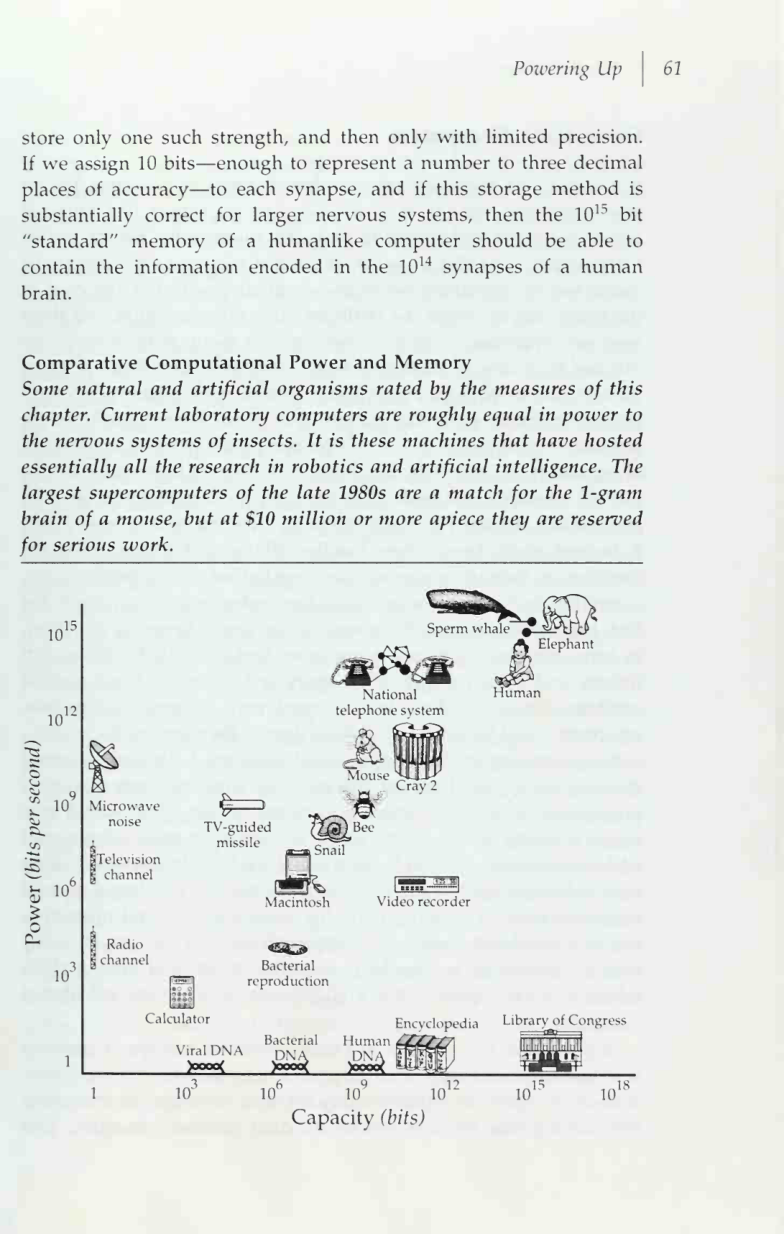
Powering Up
61
store only one such strength, and then only with limited precision.
If we assign 10 bits—enough to represent a number to three decimal
places of accuracy—to each synapse, and
if this storage method
is
substantially
correct
for
larger nervous
systems,
then
the
10'"'
bit
"standard" memory
of
a humanlike computer should
be
able
to
contain
the information encoded
in
the
10'"* synapses of a human
brain.
Comparative Computational Power and Memory
Some natural and artificial organisms rated by the measures of this
chapter. Current laboratory computers are roughly equal in power to
the nervous systems of insects.
It is these machines that have hosted
essentially all the research in robotics and artificial intelligence. The
largest supercomputers of the late 1980s are a match for the 1-gram
brain of a mouse, but at $10 million or more apiece they are reserved
for serious work.
10
10
T3C
10
i
10
o
CI.
10'
Microwave
noise
|Tele\ision
§ channel
Radio
channel
TV-guided
missile
Macintosh
Video recorder
Bacterial
reproduction
Calculator
Encyclopedia
Library of Congress
Bacterial
Human
ywoo^
Aiooo^
AMv^
-^
10
10
10
10
Capacity (bits)
12
10
15
10
18
62
Mind Children
Comparing Computers
It is easy to see that computers are becoming more powerful, but by
how much and how
fast?
Just when can we expect
10 teraops in
a package sized and priced
to
fit in an autonomous robot?
When
I
first approached
this question,
it seemed natural to rate electronic
computers in operations per second, beginning with the first ones in
the 1940s, and to project the resulting curve into the future. But there
were complications.
The machines came in many sizes, with prices
ranging from tens of dollars to tens of millions of dollars. A given
model could be equipped with many options, more memory, auxihary
processors, faster input and output, and so on.
Recent machines are
sometimes multiprocessors—multiple computers working in lockstep,
or separately, sharing data. Machines had different instruction sets, so
that an operation that took 10 instructions on one might be done on
another in a single step. Some computers worked with numbers only
5 decimal places long; others handled 20 digits at a time.
Also, the
literature on the early electronic machines led me to their predecessors,
computers built of telephone relays, the electromagnetic switches that
had been
perfected
for
telephone exchanges.
Research on
those,
in turn, suggested yet earlier machines that calculated with motor-
driven, and even hand-cranked,
gears and cams.
If these manual
machines could somehow be compared with automatic computers,
my curve could be extended back in time to the nineteenth century.
As a
first step
in devising a useful measure,
I decided
to cancel
the
size differences between machines by dividing each machine's
processing power by
its price, in constant dollars.
This would give
me an estimate of cost-effectiveness. For the mechanical calculators
I
added the human operator (valued at 100,000 1988 dollars—as if salary
were a leasing cost) to the price, since to solve a problem a manual
calculator needs a human to steadily enter numbers and operations
and to write down results. This approach allowed the cost of purely
manual calculation
to also be measured—an unaided human clerk,
whose effective capital cost is $100,000, can do about one calculation
a minute!
Step two was to figure out just how factors such as speed, memory
size, and instruction repertoire affected a machine's processing power.
This was slippery. Computers today are often compared by measuring
the running time of large sets of standard programs on each.
This
Powering Up
63
route was not open
to me, since most of the machines
I hoped
to
include in my curve no longer exist.
I did know how long most of the
machines took to add and to multiply two numbers, how many words
of memory each had and the size of a word, and the approximate size
of each machine's instruction repertoire. Processing power was to be
the amount of computation done by the machine in a given time.
If
I
could estimate how much computation each instruction accomplished,
on the average,
I would merely have to multiply by the number of
instructions executed per unit time to get total power. So the problem
reduced itself to estimating the work done by a single instruction.
Suppose a child's story begins with the words:
Here's my
cat.
It
has
fiir.
It has
claivs...
Pretty boring,
right?
Imagine, now, another
story
that
starts out with:
Here's my
cat.
It wears
a
hat.
It
totes a
gun...
Better. The second story seems more interesting and informative
because its later statements are less likely—cats usually have fur and
claws, but they rarely carry hats and guns.
In 1948 Claude Shannon
of MIT formalized such observations in a mathematical system that
came to be known as information
theory. One of its key ideas
is that
the information content of a message goes up as
its likelihood,
as
measured by the recipient, decreases (mathematically, as the negative
logarithm of the probability).
A series of messages has maximum
information content when
it is maximally "surprising."
My measure of effective computation works the same way.
Each
instruction executed by
a machine
is
like
a
message.
The more
predictable its sequence of instructions, the less useful work a machine
is doing.
For instance, a program that causes a computer simply to
add one to a memory location once every millionth of a second
is
doing almost nothing of consequence.
The contents of the memory
location at any time in the future are known in advance. But even the
best programs are limited in how much "surprise" they can introduce
into a computation at every step.
Each instruction can specify only
a
finite number of different possible operations and choose from a
finite number of memory locations, each itself containing only a finite
number of possibilities.
These sources of surprise can be combined
using the formulas of information theory
to express the maximum
information content of a single computer instruction.
I detail such a calculation in Appendix
2. The numbers vary from
machine to machine and program to program, but
I conclude there
that
a
typical computer running an exceptionally
efficient program
Information Theory and Computation
- Claude Shannon's information theory defines the content of a message by its level of surprise or unpredictability.
- Effective computation is measured similarly, where predictable instruction sequences represent less useful work than surprising ones.
- A typical efficient computer program produces approximately 50 bits of 'surprise' per operation performed.
- Human-equivalent robotics is estimated to require a computational power of 10 to the 14th bits per second.
- Historical data shows a trillionfold increase in the amount of computation a dollar can buy since the year 1900.
- The evolution of computing spans from Babbage's steam-powered Analytical Engine to modern electronic processors.
The second story seems more interesting and informative because its later statements are less likely—cats usually have fur and claws, but they rarely carry hats and guns.
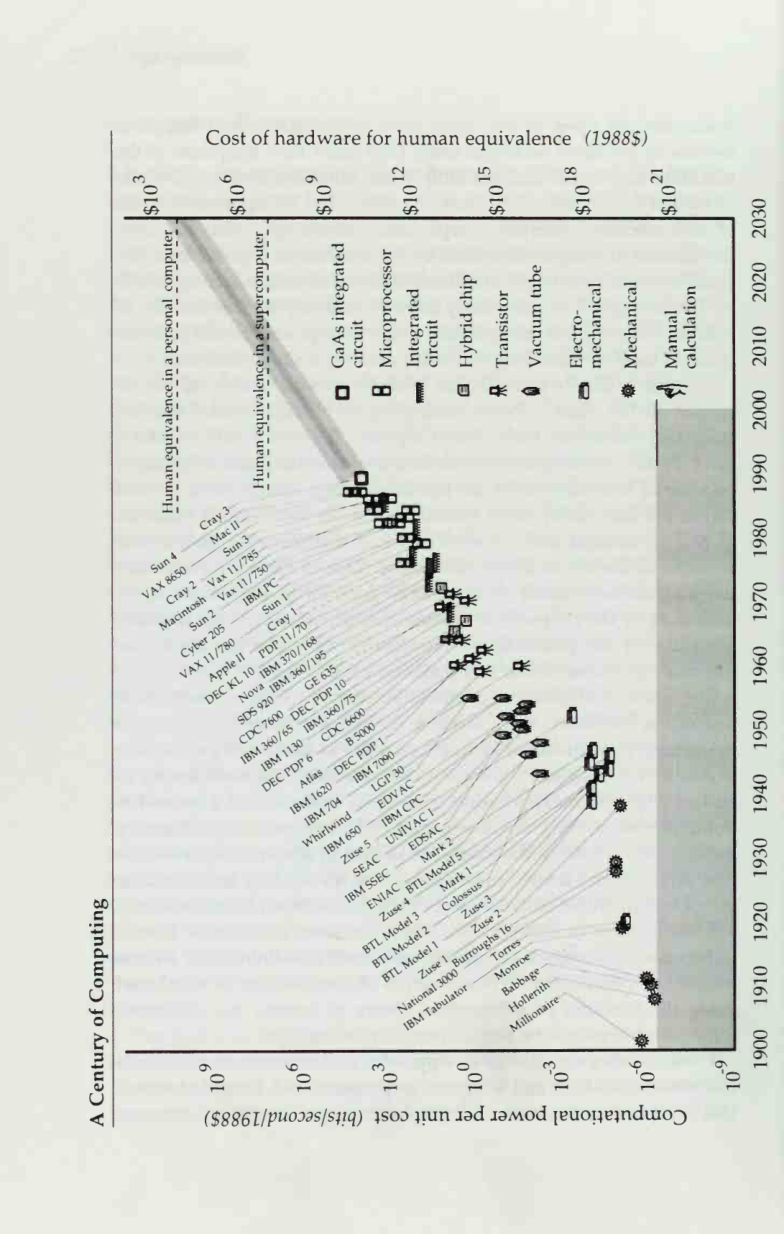
Powering Up
63
route was not open
to me, since most of the machines
I hoped
to
include in my curve no longer exist.
I did know how long most of the
machines took to add and to multiply two numbers, how many words
of memory each had and the size of a word, and the approximate size
of each machine's instruction repertoire. Processing power was to be
the amount of computation done by the machine in a given time.
If
I
could estimate how much computation each instruction accomplished,
on the average,
I would merely have to multiply by the number of
instructions executed per unit time to get total power. So the problem
reduced itself to estimating the work done by a single instruction.
Suppose a child's story begins with the words:
Here's my
cat.
It
has
fiir.
It has
claivs...
Pretty boring,
right?
Imagine, now, another
story
that
starts out with:
Here's my
cat.
It wears
a
hat.
It
totes a
gun...
Better. The second story seems more interesting and informative
because its later statements are less likely—cats usually have fur and
claws, but they rarely carry hats and guns.
In 1948 Claude Shannon
of MIT formalized such observations in a mathematical system that
came to be known as information
theory. One of its key ideas
is that
the information content of a message goes up as
its likelihood,
as
measured by the recipient, decreases (mathematically, as the negative
logarithm of the probability).
A series of messages has maximum
information content when
it is maximally "surprising."
My measure of effective computation works the same way.
Each
instruction executed by
a machine
is
like
a
message.
The more
predictable its sequence of instructions, the less useful work a machine
is doing.
For instance, a program that causes a computer simply to
add one to a memory location once every millionth of a second
is
doing almost nothing of consequence.
The contents of the memory
location at any time in the future are known in advance. But even the
best programs are limited in how much "surprise" they can introduce
into a computation at every step.
Each instruction can specify only
a
finite number of different possible operations and choose from a
finite number of memory locations, each itself containing only a finite
number of possibilities.
These sources of surprise can be combined
using the formulas of information theory
to express the maximum
information content of a single computer instruction.
I detail such a calculation in Appendix
2. The numbers vary from
machine to machine and program to program, but
I conclude there
that
a
typical computer running an exceptionally
efficient program
Cost of hardware for human equivalence
(1988$)
G
a
BoU
Mmo
3
**C
0)U
($886l/P^0D3s/siiq)
}soD 4iun jad laMod iBuoi4C4ndui03
Powering Up
65
produces about 50 bits of surprise for each operation performed.
If
the computer can do
1 milUon operations per second,
its maximum
computational power is about 50 milUon bits per second. Expressed in
these units, the computational power required in a human-equivalent
robot is about
10''* bits per second.
Projections
The figure on page 64 plots the number of bits per second of compu-
tational power provided per (constant 1988) dollar of purchase price
by a number of notable computing machines from 1900 to the present.
Although numerous mechanical digital calculators were devised and
built during the seventeenth and eighteenth centuries, only with the
mechanical advances of the industrial revolution did they become re-
liable and inexpensive enough to rival manual calculation. By the late
nineteenth century their edge was clear and the continuing progress
dramatic. The vertical scale in the figure is logarithmic—equal steps
represent tenfold increases in the ratio of performance to price. Since
1900 there has been a trillionfold increase in the amount of computation
a dollar will buy. Each of the machines in the figure has a fascinating
story; but since this book is not primarily a history of computation,
I
will restrict myself to a few highlights. The Origins of Digital Computers:
Selected Papers, edited by Brian Randell, contains excellent first-hand
accounts of many of these early machines.
Charles Babbage,
of Cambridge, England, conceived
the idea of
an automatic program-controlled calculating machine in 1834, almost
a century before anyone
else.
This "Analytical Engine" was
to be
a steam-engine-powered
calculating behemoth
of gears and
shafts
dealing
in 50-digit decimal numbers.
A rack of cogwheels was
to
store 1,000 such numbers, and a calculating unit was to be able to add
two numbers in less than ten seconds and to multiply them in under
a minute.
The machine was to be controlled on the small scale by
slowly rotating pin-studded drums such as those that
still pluck the
reeds in mechanical music boxes, and on a coarser scale by a stream of
punched cards specifying memory locations and arithmetic operations
to be performed with their contents.
In
concept,
the
Analytical Engine contained
all
the elements
of
a modern
digital computer.
Babbage worked on
it
for the
last 37
years of his
life, but
it was never completed. The enormous scale of
The Evolution of Mechanical Calculation
- Charles Babbage's Analytical Engine conceptually contained all elements of a modern digital computer but remained unfinished due to the limitations of 19th-century mechanical arts.
- Early mechanical calculators were manually operated by clerks, with their speed and reliability improving through advancements in precision mass-produced gears and lubricants.
- The 1920s and 1930s saw a transition toward automation through the integration of electric motors, electromagnets, and typewriter-style interfaces.
- Konrad Zuse independently pioneered programmed calculation in the 1930s, eventually building the first tape-controlled binary floating-point computer in 1941.
- The era of massive electromechanical relay computers, such as those from Bell Labs and Harvard-IBM, was short-lived as they were quickly eclipsed by electronic machines.
The machine was to be controlled on the small scale by slowly rotating pin-studded drums such as those that still pluck the reeds in mechanical music boxes.
Powering Up
65
produces about 50 bits of surprise for each operation performed.
If
the computer can do
1 milUon operations per second,
its maximum
computational power is about 50 milUon bits per second. Expressed in
these units, the computational power required in a human-equivalent
robot is about
10''* bits per second.
Projections
The figure on page 64 plots the number of bits per second of compu-
tational power provided per (constant 1988) dollar of purchase price
by a number of notable computing machines from 1900 to the present.
Although numerous mechanical digital calculators were devised and
built during the seventeenth and eighteenth centuries, only with the
mechanical advances of the industrial revolution did they become re-
liable and inexpensive enough to rival manual calculation. By the late
nineteenth century their edge was clear and the continuing progress
dramatic. The vertical scale in the figure is logarithmic—equal steps
represent tenfold increases in the ratio of performance to price. Since
1900 there has been a trillionfold increase in the amount of computation
a dollar will buy. Each of the machines in the figure has a fascinating
story; but since this book is not primarily a history of computation,
I
will restrict myself to a few highlights. The Origins of Digital Computers:
Selected Papers, edited by Brian Randell, contains excellent first-hand
accounts of many of these early machines.
Charles Babbage,
of Cambridge, England, conceived
the idea of
an automatic program-controlled calculating machine in 1834, almost
a century before anyone
else.
This "Analytical Engine" was
to be
a steam-engine-powered
calculating behemoth
of gears and
shafts
dealing
in 50-digit decimal numbers.
A rack of cogwheels was
to
store 1,000 such numbers, and a calculating unit was to be able to add
two numbers in less than ten seconds and to multiply them in under
a minute.
The machine was to be controlled on the small scale by
slowly rotating pin-studded drums such as those that
still pluck the
reeds in mechanical music boxes, and on a coarser scale by a stream of
punched cards specifying memory locations and arithmetic operations
to be performed with their contents.
In
concept,
the
Analytical Engine contained
all
the elements
of
a modern
digital computer.
Babbage worked on
it
for the
last 37
years of his
life, but
it was never completed. The enormous scale of
66
Mind Children
the project and the tender state of the mechanical
art (components
were
still typically hand fitted) made
it unlikely that he could have
succeeded in his lifetime. Precision interchangeable parts were much
more common by the early twentieth century, and in 1910 Babbage's
youngest son was able to demonstrate a working portion of the central
calculating unit, although he did not complete the entire machine.
I
have included the Analytical Engine as a 1910 data point in my figure
since it is likely that the machine could have been built at that time if
a pressing need had arisen.
The other mechanical calculators in the chart were manually op-
erated and were sold primarily to businesses for use by clerks and
accountants, though some found uses in science. As mentioned pre-
viously,
I included the "price" of the human operator in the cost of
calculation for these. The early improvements in speed and reliability
came with advances
in mechanics:
precision mass-produced gears
and cams, for instance, improved springs and lubricants, as well as
increasing design experience and competition among the calculator
manufacturers.
Powering calculators by
electric motors provided a
boost in both speed and automation in the 1920s, as did incorporating
electromagnets and special switches in the innards in the 1930s.
Leonardo Torres y Quevedo, a Spanish inventor, demonstrated an
electromechanical calculator in Madrid in 1919. Controlled by simple
arithmetical commands entered at a typewriter keyboard, the "Torres
Arithmometer" lacked a memory and was not fully automatic in the
modern sense.
Yet
it was close, and
it could have been converted to
automatic operation by addition of a tape unit for entering commands,
and made practical by addition of a unit to store and recall a handful
of numbers.
Konrad Zuse
independently
invented
the
idea
of programmed
calculation
as a young man
in Germany
in
1934;
he
built several
large, automatic electromechanical computers
in
his parents'
living
room.
The third machine in the series, built with backing from the
German government and completed
in 1941, was a complete, tape-
controlled, binary floating-point (meaning
it represented numbers in
scientific notation, allowing for very small and very large numbers)
computer with a 64-word memory. Zuse formed a company that sold
improved models in the years following the war.
The Bell Telephone Labs (BTL) machines were built using telephone-
exchange
relay-switching
techniques.
The
first two were modest
Powering Up
67
internal
projects,
built
to
test
antiaircraft gun
directors.
The third
was a massive general-purpose, tape-controlled, automatic computer,
intended as a commercial product.
It was overtaken by much faster
electronic machines and was never successful.
The huge Harvard-
IBM machines were of similar construction and suffered a similar fate.
The era of general-purpose relay computers was over almost before
it
began.
One class of electromechanical machine had a longer
histor\'.
The
Constitution
of
the United
States
specifies
that
a
national
census
must be taken every decade.
As the country grew, these censuses
took longer and longer
to
tally.
The 1880
results were
still being
organized in 1887.
It was obvious that without improved techniques
the 1890 census would
last beyond
1900.
The Census Office held a
competition for a better svstem.
The winner was a young engineer
named Herman Hollerith, who devised machinery that automatically
counted holes in punched cards. Over the next half century Hollerith's
invention evolved into a battery of "tabulating" machines that sorted
and
interleaved punched
cards,
duplicated
them,
printed on and
from
them,
and
did
calculations
with
their
contents.
Hollerith's
company grew
into International Business Machines, which
to
this
dav represents 70% of the computer industrv.
Electronic tube computers using radio and ultrafast radar techniques
appeared
as government-funded
projects toward
the end
of World
War
II. The
first commercially manufactured machine
of
this kind
was the UNIVAC
I, and
its
first customer was the Census Bureau,
in 1951.
By the end of the 1950s there were about 6,000 computers
overall
in industry, government, and universities.
Their electronics
was built around vacuum tubes, and thev became known as the "first
generation" of computers.
Beginning
in about 1960,
a second generation of machines began
to appear that used newly developed transistors in place of vacuum
tubes.
They were smaller, more reliable, and cheaper and used
less
electricity than
the vacuum tube computers, while providing more
speed and memorv.
By the late 1960s IBM began to introduce a third generation of ma-
chines using "hybrid integrated circuits." Dozens of tiny, unpackaged
transistors and other electronic components were bonded onto wiring
printed on ceramic chips the size of a thumbnail. Over the next several
years these hybrid chips gave way to "monolithic" integrated circuits.
The Evolution of Computing Power
- The 1890 census crisis led to Herman Hollerith's punched card system, which eventually evolved into the corporate giant IBM.
- Computing technology progressed through distinct generations, moving from vacuum tubes to transistors and then to integrated circuits.
- The rapid advancement of microprocessors eventually made the 'generational' naming system obsolete as computers became ubiquitous in everyday devices.
- Economic efficiency in computing has increased a thousandfold every twenty years, resulting in a trillionfold cost decline over eight decades.
- Current trends suggest that the computational power required for human-level intelligence will be affordable in personal computers by 2030.
- The steady rate of improvement is described as a self-fulfilling prophecy driven by industry awareness of Moore's Law and similar observations.
Progress was now so bewilderingly fast and multifaceted, with computers appearing in everyday devices such as microwave ovens, that the industry gave up on the generational nomenclature.
Powering Up
67
internal
projects,
built
to
test
antiaircraft gun
directors.
The third
was a massive general-purpose, tape-controlled, automatic computer,
intended as a commercial product.
It was overtaken by much faster
electronic machines and was never successful.
The huge Harvard-
IBM machines were of similar construction and suffered a similar fate.
The era of general-purpose relay computers was over almost before
it
began.
One class of electromechanical machine had a longer
histor\'.
The
Constitution
of
the United
States
specifies
that
a
national
census
must be taken every decade.
As the country grew, these censuses
took longer and longer
to
tally.
The 1880
results were
still being
organized in 1887.
It was obvious that without improved techniques
the 1890 census would
last beyond
1900.
The Census Office held a
competition for a better svstem.
The winner was a young engineer
named Herman Hollerith, who devised machinery that automatically
counted holes in punched cards. Over the next half century Hollerith's
invention evolved into a battery of "tabulating" machines that sorted
and
interleaved punched
cards,
duplicated
them,
printed on and
from
them,
and
did
calculations
with
their
contents.
Hollerith's
company grew
into International Business Machines, which
to
this
dav represents 70% of the computer industrv.
Electronic tube computers using radio and ultrafast radar techniques
appeared
as government-funded
projects toward
the end
of World
War
II. The
first commercially manufactured machine
of
this kind
was the UNIVAC
I, and
its
first customer was the Census Bureau,
in 1951.
By the end of the 1950s there were about 6,000 computers
overall
in industry, government, and universities.
Their electronics
was built around vacuum tubes, and thev became known as the "first
generation" of computers.
Beginning
in about 1960,
a second generation of machines began
to appear that used newly developed transistors in place of vacuum
tubes.
They were smaller, more reliable, and cheaper and used
less
electricity than
the vacuum tube computers, while providing more
speed and memorv.
By the late 1960s IBM began to introduce a third generation of ma-
chines using "hybrid integrated circuits." Dozens of tiny, unpackaged
transistors and other electronic components were bonded onto wiring
printed on ceramic chips the size of a thumbnail. Over the next several
years these hybrid chips gave way to "monolithic" integrated circuits.
68
Mind Children
in which dozens of components were etched directly into silicon chips
a few millimeters square.
Integrated
circuit technology developed
rapidly, and by the mid-
1970s
a
chip
could
contain thousands
of components.
A
fourth
generation of computers, whose heart was a handful of such chips,
appeared but was quickly
eclipsed by
the
microprocessor,
a
chip
with tens of thousands of components that was, by itself, a complete
computer. Progress was now so bewilderingly fast and multifaceted,
with computers appearing
in everyday devices such as microwave
ovens, that the industry gave up on the generational nomenclature.
(The last vestige was the Japanese Fifth Generation project, a research
effort to develop artificially intelligent machines.)
I am typing these
words on a Macintosh
II computer, a machine containing manv chips
with
over
a
million components
each,
and
a machine without
a
generation!
Human Equivalence in 40 Years
The progress documented
in
the
figure on page 64
is remarkably
steady despite radical changes in the nature of computing this century.
The amount of computational power that a dollar can purchase has
increased a thousandfold every two decades since the beginning of
the century. In eighty years, there has been a triUionfold decline in the
cost of calculation.
If this rate of improvement were to continue into
the next century, the 10 teraops required
for a humanlike computer
would be available in a $10 million supercomputer before 2010 and in
a $1,000 personal computer by 2030.
But can this mad dash be sustained for another forty years?
Easily!
The curve
in
the
figure
is not
leveling
off, and
the
technological
pipeline contains laboratory developments that are already close to
my requirements.
To a large extent, the slope of the figure
is a
self-
fulfilling prophecy Integrated circuit manufacturers have been aware
of the trend since Gordon Moore, one of the inventors of the integrated
circuit, noted in 1963 that the number of components on a chip was
doubling each year. Computer makers have had similar observations,
and new products in both of these related
fields are designed with
the
trend
in
mind.
Established
manufacturers
design and
price
products
to stay on the curve,
to maximize
profit; new companies
The Vicious Cycles of Miniaturization
- The electronics industry sustains its growth through a self-reinforcing cycle where current computers are used to design even faster and cheaper future circuits.
- Miniaturization is the primary driver of progress, as smaller components simultaneously reduce manufacturing costs and increase operational speed.
- Historical trends show a consistent cost-per-pound for machinery even as complexity increases, from 1930s radios to 1980s home computers.
- The physical volume required to switch a signal has shrunk from the size of a fist to that of a bacterium, while switching speeds have increased a millionfold.
- Future advances face physical limits, such as the wavelength of light, necessitating new technologies like synchrotron radiation and X-ray lithography.
Electronics is riding these vicious cycles so quickly that it is hkely to be the main occupation of the human race by the end of the century.
68
Mind Children
in which dozens of components were etched directly into silicon chips
a few millimeters square.
Integrated
circuit technology developed
rapidly, and by the mid-
1970s
a
chip
could
contain thousands
of components.
A
fourth
generation of computers, whose heart was a handful of such chips,
appeared but was quickly
eclipsed by
the
microprocessor,
a
chip
with tens of thousands of components that was, by itself, a complete
computer. Progress was now so bewilderingly fast and multifaceted,
with computers appearing
in everyday devices such as microwave
ovens, that the industry gave up on the generational nomenclature.
(The last vestige was the Japanese Fifth Generation project, a research
effort to develop artificially intelligent machines.)
I am typing these
words on a Macintosh
II computer, a machine containing manv chips
with
over
a
million components
each,
and
a machine without
a
generation!
Human Equivalence in 40 Years
The progress documented
in
the
figure on page 64
is remarkably
steady despite radical changes in the nature of computing this century.
The amount of computational power that a dollar can purchase has
increased a thousandfold every two decades since the beginning of
the century. In eighty years, there has been a triUionfold decline in the
cost of calculation.
If this rate of improvement were to continue into
the next century, the 10 teraops required
for a humanlike computer
would be available in a $10 million supercomputer before 2010 and in
a $1,000 personal computer by 2030.
But can this mad dash be sustained for another forty years?
Easily!
The curve
in
the
figure
is not
leveling
off, and
the
technological
pipeline contains laboratory developments that are already close to
my requirements.
To a large extent, the slope of the figure
is a
self-
fulfilling prophecy Integrated circuit manufacturers have been aware
of the trend since Gordon Moore, one of the inventors of the integrated
circuit, noted in 1963 that the number of components on a chip was
doubling each year. Computer makers have had similar observations,
and new products in both of these related
fields are designed with
the
trend
in
mind.
Established
manufacturers
design and
price
products
to stay on the curve,
to maximize
profit; new companies
Powering Up
69
aim above
the curve,
to gain
a competitive edge.
The industry's
success
is one reason the success can continue—its enormous, and
rapidly
increasing,
wealth supports more and
better research and
development of further advances.
Also, the very computers that the
industry makes are employed
in
the design of future
circuits and
computers.
As they become better and cheaper, so does the design
process, and vice versa.
Electronics
is riding these vicious cycles so
quickly that
it
is hkely to be the main occupation of the human race
by the end of the century.
A key driver of both this decline in price and gain in performance
is miniaturization.
Small components simultaneously cost
less and
operate more
quickly.
Charles Babbage realized
this
in
1834.
He
wrote
that
the
speed
of
his
Analytical
Engine,
which
called
for
hundreds of thousands of mechanical components, could be increased
in
proportion
if
"as
the mechanical
art achieved
higher
states
of
perfection"
his palm-sized
gears could be reduced
to
the
scale
of
clockwork, or further to watchwork.
(Try to imagine our world
if
electricity had not been discovered and the best minds had continued
on Babbage's
course.
By now
there might be desk- and
pocket-
sized mechanical computers containing millions of microscopic gears,
computing at thousands of revolutions per second.)
To a remarkable extent the cost per pound of machinery has
re-
mained constant as the machinery has become more intricate. This is
as true of consumer electronics as of computers (merging categories
in the 1980s).
The radios of the 1930s were as large and expensive
as the televisions of the 1950s, the color televisions of the 1970s, and
the home computers of the 1980s. The volume required to amplify or
switch a single signal dropped from the size of a fist in 1940 to that of
a thumb in 1950, to a pencil eraser in 1960, to a salt grain in 1970, to a
small bacterium in 1980. In the same period, the basic switching speed
rose a millionfold and the cost declined by the same huge amount.
I
cannot
tell you exactly what developments will yield the additional
factor of a million
I project—such predictions are impossible for many
reasons. Entirely new and unexpected possibilities are encountered in
the course of basic research. Even among the known contenders, many
techniques are in competition, and a promising line of development
may be abandoned simply because some other approach has a slight
edge.
I can
tell you that there are experimental components in lab-
70
Mind Children
oratories today that improve on the best commercial components a
thousandfold, at least in speed and size. Here
is a short list of what
looks promising today.
In recent years the widths of the connections within integrated cir-
cuits have shrunk to less than one micrometer, perilously close to the
wavelength of the light used to print the circuitry. The manufacturers
have switched from
visible
light
to shorter wavelength
ultraviolet,
but this gives them only a short respite.
X-rays, with much shorter
wavelengths, would serve longer, but conventional x-ray sources are
so weak and diffuse that they need uneconomically long exposure
times.
High-energy
particle
physicists have an answer.
Speeding
electrons curve in magnetic fields and spray photons like mud from
a spinning wheel. Called synchrotron radiation for the class of particle
accelerator where
it became a nuisance, the effect can be harnessed
to produce powerful beamed x-rays.
The stronger the magnets, the
smaller the synchrotron.
With supercold superconducting magnets,
an adequate machine can
fit into a truck; otherwise
it
is the size of
a small building.
Either way, synchrotrons are now of hot interest
and promise
to shrink mass-produced
circuitry
into the submicron
region. Electron and ion beams are also being used to write submicron
circuits, but present systems affect only small regions at a time and
must be scanned slowly across a
chip.
The scanned nature makes
computer-controlled electron beams ideal, however, for manufacturing
the "masks" that act like photographic negatives in circuit printing.
Smaller circuits have less electronic inertia; they switch faster and
need lower voltages and
less power.
On the negative
side, as the
number of electrons in a signal drops, the circuit becomes more prone
to thermal jostling. This effect can be countered by cooling, and indeed
fast experimental circuits in many labs now run in supercold liquid
nitrogen. One supercomputer is being designed to operate this way.
Liquid
nitrogen
is produced
in huge amounts
in
the manufacture
of liquid oxygen from
air, and
it
is cheap (unlike the much colder
liquid helium). Uneven clumping of key impurities results in erratic
component values as circuits get smaller, so more precise methods
for implanting them are being developed. Quantum effects become
more pronounced,
creating new problems and new
opportunities.
Superlattices—multiple
layers of atoms-thick regions
of differently
doped silicon made with molecular beams—are such an opportunity.
They allow the electronic characteristics of the material to be tuned
The Future of Submicron Circuitry
- Synchrotrons and electron beams are enabling the transition to submicron circuitry, allowing for faster switching and lower power consumption.
- As circuits shrink, they face challenges like thermal noise and impurity clumping, necessitating cooling with liquid nitrogen and more precise manufacturing.
- New materials like gallium arsenide and diamond are poised to replace silicon, offering significantly higher speeds and superior heat conduction.
- Quantum dot devices and superlattices exploit the wavelike behavior of electrons to create entirely new switching methods and tenfold performance gains.
- The discovery of high-temperature ceramic superconductors may lead to extremely fast, efficient circuits that operate at the scale of a picosecond.
The vision of an ultradense three-dimensional circuit in a gem-quality diamond is compelling.
70
Mind Children
oratories today that improve on the best commercial components a
thousandfold, at least in speed and size. Here
is a short list of what
looks promising today.
In recent years the widths of the connections within integrated cir-
cuits have shrunk to less than one micrometer, perilously close to the
wavelength of the light used to print the circuitry. The manufacturers
have switched from
visible
light
to shorter wavelength
ultraviolet,
but this gives them only a short respite.
X-rays, with much shorter
wavelengths, would serve longer, but conventional x-ray sources are
so weak and diffuse that they need uneconomically long exposure
times.
High-energy
particle
physicists have an answer.
Speeding
electrons curve in magnetic fields and spray photons like mud from
a spinning wheel. Called synchrotron radiation for the class of particle
accelerator where
it became a nuisance, the effect can be harnessed
to produce powerful beamed x-rays.
The stronger the magnets, the
smaller the synchrotron.
With supercold superconducting magnets,
an adequate machine can
fit into a truck; otherwise
it
is the size of
a small building.
Either way, synchrotrons are now of hot interest
and promise
to shrink mass-produced
circuitry
into the submicron
region. Electron and ion beams are also being used to write submicron
circuits, but present systems affect only small regions at a time and
must be scanned slowly across a
chip.
The scanned nature makes
computer-controlled electron beams ideal, however, for manufacturing
the "masks" that act like photographic negatives in circuit printing.
Smaller circuits have less electronic inertia; they switch faster and
need lower voltages and
less power.
On the negative
side, as the
number of electrons in a signal drops, the circuit becomes more prone
to thermal jostling. This effect can be countered by cooling, and indeed
fast experimental circuits in many labs now run in supercold liquid
nitrogen. One supercomputer is being designed to operate this way.
Liquid
nitrogen
is produced
in huge amounts
in
the manufacture
of liquid oxygen from
air, and
it
is cheap (unlike the much colder
liquid helium). Uneven clumping of key impurities results in erratic
component values as circuits get smaller, so more precise methods
for implanting them are being developed. Quantum effects become
more pronounced,
creating new problems and new
opportunities.
Superlattices—multiple
layers of atoms-thick regions
of differently
doped silicon made with molecular beams—are such an opportunity.
They allow the electronic characteristics of the material to be tuned
Powering Up
71
and
permit
entirely new switching methods,
often
giving
tenfold
improvements.
Even more exciting are "quantum dot" devices that
exploit the wavelike behavior of small numbers of electrons trapped
in regions smaller than the electron wavelength.
The
first
transistors were made
of germanium;
they
could
not
withstand high temperatures and tended to be unreliable. Improved
understanding of semiconductor physics and ways of growing silicon
crystals made
possible
faster and more
reliable
silicon
transistors
and integrated
circuits. Newer materials are now coming into their
own.
The most immediate
is gallium
arsenide.
Its
crystal
lattice
impedes electrons less than silicon and makes circuits up to ten times
faster. The Cray 3 supercomputer, scheduled to appear late in 1988,
uses gallium arsenide
integrated
circuits packed
into
a
one-cubic-
foot volume,
to top the Cray
2's speed
tenfold.
Other compounds
hke indium phosphide and
silicon carbide wait in the wings.
Pure
carbon
in diamond form
is
a
definite
possibility;
it should be
as
much an improvement over gallium arsenide as that crystal
is over
silicon.
Among
its many superlatives,
perfect diamond
is the best
solid conductor of
heat, an important property
in densely packed
circuitry.
The vision of an ultradense three-dimensional circuit in a
gem-quality diamond
is compelling.
As yet no working circuits of
diamond have been reported, but the odds improved
in 1987 with
reports from the Soviet Union, Japan, and, belatedly, the United States,
of diamond layers up to a millimeter thick grown from microwave-
heated methane.
The ultimate circuits may be superconducting quantum devices
not only extremely fast but highly efficient. Superconducting circuits
have been in and out of fashion over the past twenty years. They have
had a tough time because the liquid helium environment they required
until recently
is expensive, the heating /cooling cycles were stressful,
and
especially because
rapidly improving
semiconductors
offered
such tough
competition.
The newly discovered
high-temperature
ceramic superconductors could solve many of these old problems all
at once. A superconducting transistor announced by Bell Laboratories
early in 1988 is less than one twentieth of a micrometer in size and able
to switch between on and off states in a picosecond (one trillionth of a
second) on receiving an input signal of only one electron! A thousand
microprocessors made of such switches would fit in the space occupied
by one of today's microprocessor chips, and each would be a thousand
The Rise of Nanotechnology
- Single-electron switches could create microprocessors a thousand times faster and smaller than current chips, reaching human-level processing power.
- Optical circuits and light-sensitive crystals offer the potential for trillion-bit storage and picosecond switching speeds.
- The scanning tunneling microscope provides a critical 'toehold' on the atomic scale, allowing for the direct manipulation of individual atoms.
- Biological systems like ribosomes demonstrate that molecular-scale machines already exist, using RNA 'tapes' to assemble complex protein structures.
- Future nanotechnology aims to fuse biology and microelectronics to create protein robots capable of building materials atom-by-atom.
- Nanotechnology operates at a scale a thousand times smaller than today's microtechnology, utilizing the predictable uniformity of atoms.
These would be small enough to grab individual molecules and hold them, thermally wriggling, in place.
Powering Up
71
and
permit
entirely new switching methods,
often
giving
tenfold
improvements.
Even more exciting are "quantum dot" devices that
exploit the wavelike behavior of small numbers of electrons trapped
in regions smaller than the electron wavelength.
The
first
transistors were made
of germanium;
they
could
not
withstand high temperatures and tended to be unreliable. Improved
understanding of semiconductor physics and ways of growing silicon
crystals made
possible
faster and more
reliable
silicon
transistors
and integrated
circuits. Newer materials are now coming into their
own.
The most immediate
is gallium
arsenide.
Its
crystal
lattice
impedes electrons less than silicon and makes circuits up to ten times
faster. The Cray 3 supercomputer, scheduled to appear late in 1988,
uses gallium arsenide
integrated
circuits packed
into
a
one-cubic-
foot volume,
to top the Cray
2's speed
tenfold.
Other compounds
hke indium phosphide and
silicon carbide wait in the wings.
Pure
carbon
in diamond form
is
a
definite
possibility;
it should be
as
much an improvement over gallium arsenide as that crystal
is over
silicon.
Among
its many superlatives,
perfect diamond
is the best
solid conductor of
heat, an important property
in densely packed
circuitry.
The vision of an ultradense three-dimensional circuit in a
gem-quality diamond
is compelling.
As yet no working circuits of
diamond have been reported, but the odds improved
in 1987 with
reports from the Soviet Union, Japan, and, belatedly, the United States,
of diamond layers up to a millimeter thick grown from microwave-
heated methane.
The ultimate circuits may be superconducting quantum devices
not only extremely fast but highly efficient. Superconducting circuits
have been in and out of fashion over the past twenty years. They have
had a tough time because the liquid helium environment they required
until recently
is expensive, the heating /cooling cycles were stressful,
and
especially because
rapidly improving
semiconductors
offered
such tough
competition.
The newly discovered
high-temperature
ceramic superconductors could solve many of these old problems all
at once. A superconducting transistor announced by Bell Laboratories
early in 1988 is less than one twentieth of a micrometer in size and able
to switch between on and off states in a picosecond (one trillionth of a
second) on receiving an input signal of only one electron! A thousand
microprocessors made of such switches would fit in the space occupied
by one of today's microprocessor chips, and each would be a thousand
71
Mind Children
times as
fast. A thousand processors, each a thousand times faster
than today's, would have just about the 10 teraops needed for human
equivalence.
Farther
off
the
beaten
track
are
optical
circuits
that
use
lasers
and
nonlinear
optical
effects
to
switch
light
instead
of
electricity.
Switching times of a few picoseconds,
a hundred times
faster than
conventional
circuits, have been demonstrated, but many
practical
problems remain. Finely tuned lasers have also been used with light-
sensitive crystals and organic molecules in demonstration memories
that can store up to a trillion bits per square centimeter.
Underlying
these
technical
advances,
and
preceding
them,
are
equally amazing advances in the methods of basic physics. One un-
expected, and somewhat unlikely, device is the inexpensive scanning
tunneling microscope that can rehably see,
identify, and manipulate
single atoms on surfaces by scanning them with a sharp needle. The
tip
is positioned by
three
piezoelectric
crystals
that
stretch micro-
scopically under the
influence of small
voltages.
A gap
of a few
atoms in size is maintained by monitoring the current that quantum-
mechanically tunnels across
it. The tunneling microscope provides a
secure toehold on the atomic scale, and big ideas about
little atoms
are being pursued by enthusiasts in both semiconductor and biotech-
nology laboratories.
Living organisms are clearly machines when viewed at the molec-
ular scale—in them information encoded in RNA "tapes" directs pro-
tein assembly devices called ribosomes to pluck specific sequences of
amino acids from the environment and attach them
to the ends of
growing chains of protein.
Proteins, in turn, fold up in certain ways,
depending on the sequence of their amino acids,
to do many
jobs.
Some proteins have moving parts
like hinges,
springs, and
latches
triggered by templates. Others are primarily structural, like bricks or
ropes or wires.
The proteins of muscle tissue work
like ratcheting
pistons.
Today's biotechnology industry depends on modest manipulations
of natural genetic machinery.
The visionaries have more elaborate
plans—nothing
less
than
the
fusion
of
biological,
microelectronic,
and micromechanical techniques into a single, immensely powerful,
new technology. Computer-modeling techniques are slowly becoming
powerful enough
to allow new proteins
to be designed and tested
on display
screens, much
as conventional machine
parts are often
Powering Up
73
developed now. Such engineered proteins, as well as existing protein
mechanisms copied from living
cells, could be assembled
into
tiny
artificial machines. Early products might be simple tailored medicines
and small experimental computer circuits.
Gradually, though, accu-
mulated tools and experience would allow the construction of more
elaborate machinery, eventually as complicated as tiny robot arms and
equally tiny computers to control them. These would be small enough
to grab individual molecules and hold them,
thermally wriggling,
in
place.
The protein robots could then be used as machine tools
to build
a second generation of even smaller,
harder, and tougher
devices by assembling atoms and molecules of all kinds. For instance,
carbon atoms might be laid, bricklike, into ultrastrong fibers of perfect
diamond.
The entire scheme has been called nanotechnology, for the
nanometer scale of
its parts.
By contrast, today's integrated
circuit
microtechnology has micrometer features, a thousand times bigger.
Some things are easier at the nanometer scale.
Atoms are perfectly
uniform in size and shape, if somewhat fuzzy, and behave predictably,
unlike the nicked, warped, and cracked
parts
in
larger machinery.
At the nanometer scale, the world
is stocked with an abundance of
components of absolute precision.
Atomic-scale machinery is a wonderful concept and would take us
far beyond the humanhke point in computers, since
it would allow
many millions
of processors
to
fit on
a
chip
that today holds but
one. Just how fast could each individual nanocomputer be? Quantum
mechanics demands a minimum energy to localize an event to a given
time:
Energy = h
j time where h
is Planck's fundamental constant of
quantum mechanics. Higher speeds require greater energy. Above the
frequency of light, about a quadrillion (10^^) transitions per second, the
energy reaches one electron volt, close to the energy of the chemical
bonds holding solid matter together.
Attempts to switch faster will
tear apart the switches. A quadrillionth of a second, or femtosecond,
is a million times faster than the nanosecond (billionth of a second)
switching time of the fastest commercial computer components today,
so a single nanocomputer might have a processing speed of a trillion
operations per second.
With millions of such processors crammed
onto a thumbnail-size chip, my human-cc]uivalence criterion would
be bested more than a millionfold!
That might seem to be enough,
but
I cannot help wondering
if, just maybe, speeds beyond this "light
barrier" are possible.
Beyond the Atomic Scale
- Atomic-scale machinery offers absolute precision, potentially allowing millions of processors to fit on a single chip.
- The physical limit for switching speeds in normal matter is constrained by the energy of chemical bonds, capping performance at roughly a quadrillion operations per second.
- Speculative physics, such as superstring theory, suggests the existence of ultradense matter that could support switching speeds far beyond the frequency of light.
- Future intelligences might exploit the gravity fields of neutron stars to build machines 10^30 times more powerful than the human mind.
- The evolution of robotics will likely transition from tools to a symbiotic partnership where the boundary between human and machine becomes blurred.
- While human-machine symbiosis is a significant phase, it may ultimately be a footnote in the long-term trajectory of artificial intelligence.
Someday, our progeny may exploit these bodies to build machines with a million million million million million (that's 10^30) times the power of a human mind.
Powering Up
73
developed now. Such engineered proteins, as well as existing protein
mechanisms copied from living
cells, could be assembled
into
tiny
artificial machines. Early products might be simple tailored medicines
and small experimental computer circuits.
Gradually, though, accu-
mulated tools and experience would allow the construction of more
elaborate machinery, eventually as complicated as tiny robot arms and
equally tiny computers to control them. These would be small enough
to grab individual molecules and hold them,
thermally wriggling,
in
place.
The protein robots could then be used as machine tools
to build
a second generation of even smaller,
harder, and tougher
devices by assembling atoms and molecules of all kinds. For instance,
carbon atoms might be laid, bricklike, into ultrastrong fibers of perfect
diamond.
The entire scheme has been called nanotechnology, for the
nanometer scale of
its parts.
By contrast, today's integrated
circuit
microtechnology has micrometer features, a thousand times bigger.
Some things are easier at the nanometer scale.
Atoms are perfectly
uniform in size and shape, if somewhat fuzzy, and behave predictably,
unlike the nicked, warped, and cracked
parts
in
larger machinery.
At the nanometer scale, the world
is stocked with an abundance of
components of absolute precision.
Atomic-scale machinery is a wonderful concept and would take us
far beyond the humanhke point in computers, since
it would allow
many millions
of processors
to
fit on
a
chip
that today holds but
one. Just how fast could each individual nanocomputer be? Quantum
mechanics demands a minimum energy to localize an event to a given
time:
Energy = h
j time where h
is Planck's fundamental constant of
quantum mechanics. Higher speeds require greater energy. Above the
frequency of light, about a quadrillion (10^^) transitions per second, the
energy reaches one electron volt, close to the energy of the chemical
bonds holding solid matter together.
Attempts to switch faster will
tear apart the switches. A quadrillionth of a second, or femtosecond,
is a million times faster than the nanosecond (billionth of a second)
switching time of the fastest commercial computer components today,
so a single nanocomputer might have a processing speed of a trillion
operations per second.
With millions of such processors crammed
onto a thumbnail-size chip, my human-cc]uivalence criterion would
be bested more than a millionfold!
That might seem to be enough,
but
I cannot help wondering
if, just maybe, speeds beyond this "light
barrier" are possible.
7^
Mind Children
The physics world
is a turbulent one, as theorists chase a goal that
eluded
Einstein:
a single theory
that encompasses
all the types of
particle and energy
in
nature.
The front-runner these days
is the
superstring model; in
it, particles are tiny loops of space knotted in
six dimensions beyond the four of normal spacetime.
Its variations
predict a host of particles heavier than those making up atoms, some
of them
stable.
Material made of such
particles would be from
a
thousand times
to astronomically denser and more tightly bonded
than normal matter.
Ultradense matter could,
in principle, support
switching operations much more rapid than the frequency of light.
The benefits
of miniaturization need
not stop
at the atomic
scale!
While ultradense matter that
is stable on earth
is just a speculation,
vast quantities of similar stuff
is known to exist in the tremendous
gravity fields of collapsed white dwarf and neutron stars. Someday,
our progeny may exploit these bodies to build machines with a million
million million million million (that's 10^°) times the power of a human
mind.
Symbiosis
XHE
robot who will work alongside us in half a
century will have some interesting properties.
Its reasoning abilities
should be astonishingly better than a human's—even today's puny
systems are much better in some areas. But its perceptual and motor
abilities will probably be comparable to ours. Most interestingly, this
artificial person will be highly changeable, both as an individual and
from one of its generations to the next.
But solitary, toiling robots, however competent, are only part of the
story. Today, and for some decades into the future, the most effective
computing machines work as tools in human hands. As the machinery
grows
in
flexibility and
initiative,
this association between humans
and machines will be more properly described as a partnership.
In
time, the relationship will become much more intimate, a symbiosis
where the boundary between the "natural" and the "artificial" partner
is no longer evident.
This collaborative route
is interesting
for
its
powerful human consequences even
if,
as
I
believe,
it
will matter
little in the long run whether or not humans are an intimate part of
the evolving artificial intelligences.
We will begin our exploration of the symbiotic path with a history of
its humble beginnings, the minimal interfaces of the earlv computers.
Stored Programs and Assemblers
ENIAC, the
first general-purpose electronic digital computer, built in
Philadelphia in 1946, was designed for hardwired control. A typical
program involved thousands of wires connected by hand from point
to point on large programming boards. "Writing" such a program was
tedious; debugging one was daunting. Onlv a few were written before
John von Neumann made a now-famous proposal. ENIAC had three
75
The Birth of Stored Programs
- The ENIAC originally required manual wiring of thousands of connections to execute a single program, making debugging a daunting task.
- John von Neumann proposed using ENIAC's function tables to store numerical instructions rather than just mathematical data.
- This shift to 'machine language' allowed computers to be reprogrammed by dialing commands rather than reconfiguring physical hardware.
- The stored program concept enabled computers to modify their own code during execution, creating a unified memory for data and instructions.
- Early memory technologies evolved from vacuum tubes and mercury acoustic pulses to magnetic cores and spinning disks.
- Magnetic core memory, using tiny donuts of magnetized material on wire nets, became the most successful early method for internal storage.
Instead of a rat's nest of wires, a program consisted of neat columns of numbers.
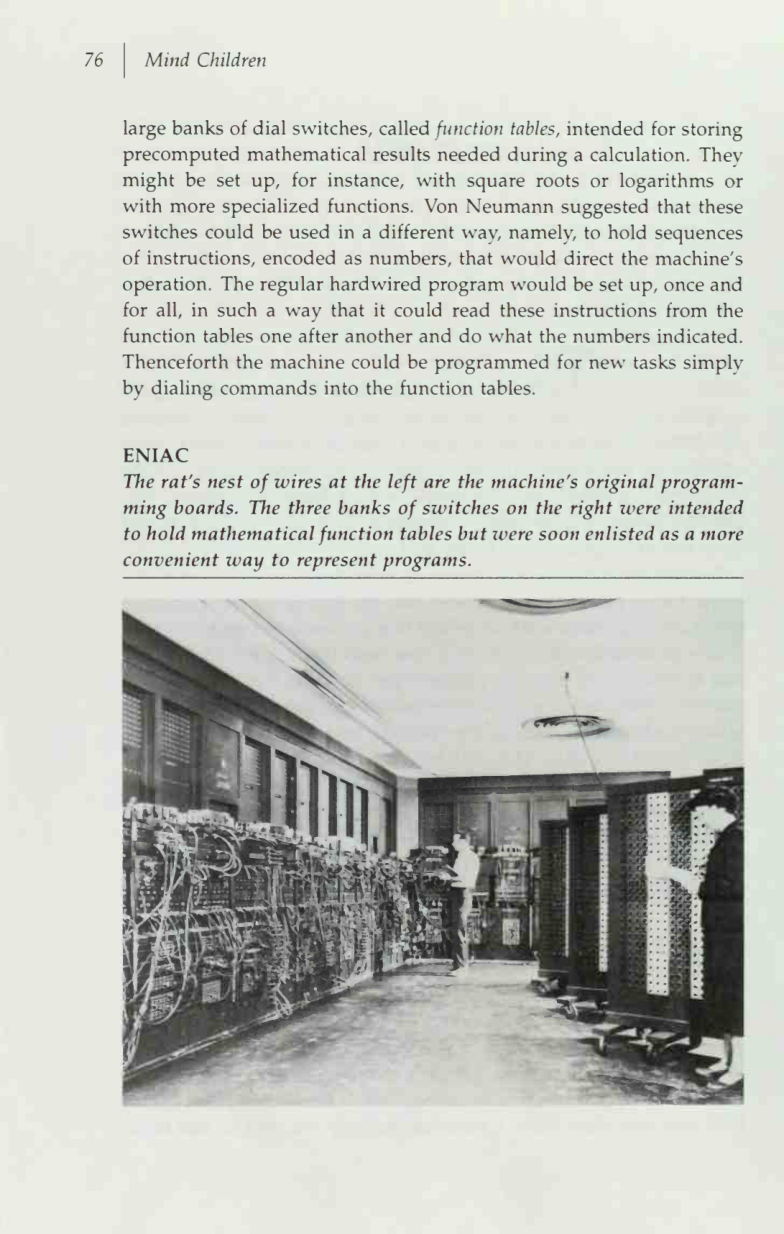
Symbiosis
XHE
robot who will work alongside us in half a
century will have some interesting properties.
Its reasoning abilities
should be astonishingly better than a human's—even today's puny
systems are much better in some areas. But its perceptual and motor
abilities will probably be comparable to ours. Most interestingly, this
artificial person will be highly changeable, both as an individual and
from one of its generations to the next.
But solitary, toiling robots, however competent, are only part of the
story. Today, and for some decades into the future, the most effective
computing machines work as tools in human hands. As the machinery
grows
in
flexibility and
initiative,
this association between humans
and machines will be more properly described as a partnership.
In
time, the relationship will become much more intimate, a symbiosis
where the boundary between the "natural" and the "artificial" partner
is no longer evident.
This collaborative route
is interesting
for
its
powerful human consequences even
if,
as
I
believe,
it
will matter
little in the long run whether or not humans are an intimate part of
the evolving artificial intelligences.
We will begin our exploration of the symbiotic path with a history of
its humble beginnings, the minimal interfaces of the earlv computers.
Stored Programs and Assemblers
ENIAC, the
first general-purpose electronic digital computer, built in
Philadelphia in 1946, was designed for hardwired control. A typical
program involved thousands of wires connected by hand from point
to point on large programming boards. "Writing" such a program was
tedious; debugging one was daunting. Onlv a few were written before
John von Neumann made a now-famous proposal. ENIAC had three
75
le
Mind Children
large banks of dial switches, called function tables, intended for storing
precomputed mathematical results needed during a calculation. They
might be
set up,
for
instance, with square
roots
or logarithms or
with more specialized functions. Von Neumann suggested that these
switches could be used in a different way, namely, to hold sequences
of instructions, encoded as numbers, that would direct the machine's
operation. The regular hardwired program would be set up, once and
for
all, in such a way that
it could read these instructions from the
function tables one after another and do what the numbers indicated.
Thenceforth the machine could be programmed for new tasks simplv
by dialing commands into the function tables.
ENIAC
The rat's nest of wires at the left are the machine's original program-
ming hoards. The three banks of switches on the right were intended
to hold mathematical function tables but were soon enlisted as a more
convenient way to represent programs.
Symbiosis
77
This new mode of programming was much easier and neater than
the
original scheme.
Instead
of
a
rat's
nest
of wires,
a program
consisted
of
neat columns
of numbers.
The numerical encoding
system
for machine operations came
to be called machine language.
It was one small step
for user-friendly computers, a giant leap for
computer organization.
All digital computers after ENIAC incorporated an expanded version
of
this
stored program
idea.
Not only were programs represented
as sequences of numbers, but the numbers were kept
in the same
memory used
for calculations and could be loaded
at high speed
from input devices such as punched paper-tape readers. This unity of
memory allowed a computer to modify
its own program in midrun,
an intriguing technique that was used extensively at
first but
is less
common now. ENIAC used a large roomful of vacuum tubes to store
fewer than
fifty numbers, and could carry out about one thousand
calculations per second.
ENIAC's
successors were
able
to
store
entire programs
in
their
working memory
because new methods were
invented
for more
densely and cheaply storing the electronic tally marks that constituted
the memory. In some, a device much like a television picture tube was
able to retain thousands of such "bits" as tiny areas of electric charge
on its glass face. A sweeping electron beam could both sense and alter
the contents of each area.
In others, thousands of bits were encoded
as a recirculating stream of acoustic pulses that traveled down a long
column
of mercury,
to be sensed
electronically
at the end of their
journey, amplified, and re-injected back into the head of the column.
Another approach was to record the bits magnetically on the surface
of a rapidly spinning drum or disk. Magnetic disks evolved into the
bulk external storage devices still in use today, but they were too slow
to survive long as the internal working memory of computers.
The most successful method turned out to be one that used tiny
donuts of a specially developed magnetic material strung on the inter-
sections of a net of fine wires. Each of these magnetic cores could store
one
bit, encoded as either a clockwise or counterclockwise magneti-
zation. The direction of magnetization of a particular magnetic core
could be changed by sending small currents through the horizontal
and vertical wires that passed through
it.
Its previous contents could
be determined with the help of another wire that zig-zagged through
all
the
cores.
Whenever any
core's magnetization
flipped from
a
The Evolution of Programming
- Magnetic core memory dominated computer storage for two decades before being replaced by silicon-based transistor circuits in the 1970s.
- Early machine-language programming was an exacting and error-prone process where a single mistake in memory addressing could break an entire system.
- The development of assemblers in the 1950s automated the translation of symbolic commands, despite protests from purists who feared a loss of control.
- High-level languages like FORTRAN allowed users to use mathematical notation, further distancing the programmer from the machine's underlying hardware.
- Compilers acted as complex translators that traded computer processing time and efficiency for human productivity and accessibility.
- This shift from manual coding to automated translation widened the 'path' between human intent and machine execution.
Programmers who became skilled at this exacting drudgery, punctuated by bursts of artful invention, were sometimes treated with the deference accorded to chess masters.
78
Mind Children
clockwise to a counter-clockwise direction, or vice versa, a tiny pulse
appeared on this wire.
Magnetic core memories holding thousands
and eventually millions of numbers were the main form of computer
working storage for over twenty years, until they were overtaken in
the mid 1970s by storage circuits much like those of ENIAC, but made
of transistors instead of tubes and arrayed in thousands on tiny silicon
chips.
Machine-language programming was a great labor saver.
But in-
creased memory, speed, and availability of computers soon lured their
users to problems so large and complex that even machine language
became unbearably tedious. A machine-language program consists
of a sequence of instructions encoded as numbers. A few digits of
each number,
the operation
code, specify the action the computer
is
to perform, say to add or to obtain the next instruction from
else-
where
in memory.
The remaining digits contain the address of one
or more locations in memory indicating, in our examples, where to
find the numbers to add or the next instruction. Converting problems
originally formulated
in terms of algebraic expressions
like x^ + y
to numerical codes that the computer could use was an unintuitive,
slow, and error-prone process. Even worse, inserting a few additional
instructions into a program might require shifting the location of much
of the rest of the program and of number storage areas in memory,
which
in turn would require the alteration of the address parts of
many, perhaps thousands, of instructions.
The slightest error in the
process could prevent the program from working. Programmers who
became
skilled
at
this exacting drudgery, punctuated by bursts of
artful invention, were sometimes treated with the deference accorded
to chess masters.
But
it did not long escape notice that computers
themselves specialize in just this sort of exacting drudgery.
By the mid-1950s programmers were writing large programs whose
function was
to
translate
symbolic commands
(like ADD
X)
into
machine language while automatically assigning and keeping track of
the location of variables and instructions.
Machine-language purists
complained that assemblers, as programs of this kind came to be called,
lessened the precise control one should have over the workings of
a computer and wasted computer time doing the translation.
Even
so, symbolic programming proved such a boon that writing machine
language quickly became an extinct art. The path connecting humans
and computers had widened again, allowing an increased flow
of
Symbiosis
79
everyday traffic. The road enhancements also facilitated the passage
of heavier road-building machinery.
Compilers and Operating Systems
Assemblers were a great help to professional programmers but were
still very tedious for occasional computer users with particular prob-
lems
to
solve.
Such end-consumers of computer power requested,
and were granted, high-level languages that let compact mathematical
notation, such as they used
routinely
in
their work,
substitute
for
longer, and more error-prone, assembler sequences.
For instance, in
a high-level language such as FORTRAN, which was one of the
first
and
still survives today, A x X + B might stand in for the assembly
sequence:
LOAD
A
MULT
X
ADD
B
Very complex programs called compilers, tours-de-force of program-
ming when they were
first written, translated lines of the high-level
language into often long machine-language sequences. The user of a
high-level language had
little or no knowledge of the final program
produced. Compilers used even more of the computer's valuable time
than did assemblers and, lacking the cleverness and insight of human
programmers, produced machine language that was larger and slower
running than that produced when the same problem was written in
assembly language. The disadvantages were great enough that, until
recently, many critical applications still demanded assembly language.
But
high-level languages had many advantages
for
the average
user.
They made programs easier to write, and many errors could
be detected during the translation instead of causing obscure failures
when the program was run.
Since high-level languages were close
in form to conventional mathematical notation, many computer non-
specialists found them easier to
learn. A transcendent feature was
transportability. Unlike machine language or assembly programs, high-
level programs did not reflect the detailed workings of any particular
machine and so could be translated for entirely different computers.
FORTRAN compilers, for instance, exist for essentially every computer
ever built, and certain useful FORTRAN programs have survived the
Evolution of Computing Interaction
- High-level languages revolutionized programming by offering transportability across different machine architectures and easier error detection.
- The transition from manual machine operation to early operating systems introduced 'batch mode' to maximize expensive computer time.
- Batch processing created a disconnect between programmers and machines, replacing real-time interaction with static memory 'core dumps.'
- The desire for interactive partnership between human judgment and machine calculation led to the development of time-sharing systems.
- Time-sharing operating systems allowed multiple users to feel they had exclusive machine access by rapidly switching control between programs.
- Despite their benefits, each major advancement—from high-level languages to time-sharing—was met with significant controversy in the field.
Interactive programs let the user and the computer act as partners, often with the user supplying insight and judgment and the computer providing prodigious calculation and memory.
Symbiosis
79
everyday traffic. The road enhancements also facilitated the passage
of heavier road-building machinery.
Compilers and Operating Systems
Assemblers were a great help to professional programmers but were
still very tedious for occasional computer users with particular prob-
lems
to
solve.
Such end-consumers of computer power requested,
and were granted, high-level languages that let compact mathematical
notation, such as they used
routinely
in
their work,
substitute
for
longer, and more error-prone, assembler sequences.
For instance, in
a high-level language such as FORTRAN, which was one of the
first
and
still survives today, A x X + B might stand in for the assembly
sequence:
LOAD
A
MULT
X
ADD
B
Very complex programs called compilers, tours-de-force of program-
ming when they were
first written, translated lines of the high-level
language into often long machine-language sequences. The user of a
high-level language had
little or no knowledge of the final program
produced. Compilers used even more of the computer's valuable time
than did assemblers and, lacking the cleverness and insight of human
programmers, produced machine language that was larger and slower
running than that produced when the same problem was written in
assembly language. The disadvantages were great enough that, until
recently, many critical applications still demanded assembly language.
But
high-level languages had many advantages
for
the average
user.
They made programs easier to write, and many errors could
be detected during the translation instead of causing obscure failures
when the program was run.
Since high-level languages were close
in form to conventional mathematical notation, many computer non-
specialists found them easier to
learn. A transcendent feature was
transportability. Unlike machine language or assembly programs, high-
level programs did not reflect the detailed workings of any particular
machine and so could be translated for entirely different computers.
FORTRAN compilers, for instance, exist for essentially every computer
ever built, and certain useful FORTRAN programs have survived the
80
Mind Children
entire history of computers, leaping from one generation of machine
to the next.
On the
first digital computers,
setting up a program, monitoring
its progress, and cleaning up afterward was a strictly manual
affair.
The programmer could watch the action on banks of lights showing
the internal state of the machine and could interrupt, examine, and
alter
it at any time, or run
it step by step. This was quite convenient
but expensive on machines whose time was valued at hundreds of
dollars per hour. To minimize the time lost, computer companies in
the late 1950s began supplying programs called monitors, supervisors,
or operating systems to manage the flow ot successive programs, read
from punched-card
readers
or
magnetic-tape
units,
through
their
machines. The early operating systems had a no-nonsense approach:
one program at a time was run;
if any problem was encountered
it
was automatically stopped, the contents of memory were printed out,
and the next program was started.
The core dump
(as the memory
printout was called, after magnetic core memory) was delivered to the
programmer, who could diagnose the problem on his or her own time.
Many programs spent only seconds in the computer, producing results
that would occupy the programmer hours or days in preparation for
the next run.
From the mid-1950s to the late 1960s this batch mode of computer
operation was the rule, and a generation of computer users, especially
users of IBM equipment, knew no other way. Some of the old timers,
however, wistfully remembered the days of hands-on use. Not only
was tracking down a programming bug easier with the computer as an
ally, but
it was possible to write programs that carried on a dialogue
with the
user.
Interactive programs
let the user and the computer
act as partners, often with the user supplying insight and judgment
and the computer providing prodigious calculation and memory. The
problem was how to arrange this level of service without having the
computer waste most of its time waiting for the human's next move.
Academic groups began work on a solution, an awesomely complex
form of operating system that kept several programs, initiated from
individual interactive terminals, going at the same time.
Each user
program would be allowed
to run for a
fraction of a second, then
the time-sharing operating system would switch control to the next
one and so on, eventually returning
to the
first. A human
tied
to
any one of the active programs would not notice the fractional second
Si/mbiosis
81
interruptions, and it would appear to each user that he had a computer
all to himself, albeit one that was a little slower than the raw machine.
A program that became temporarily inactive waiting for user response
would simplv be skipped by the operating system, with
little time
wasted.
Like the assemblers and
high-level languages before them, time-
sharing systems caused
considerable
controversy
in
the computer
community.
With their need
to keep the resources for several pro-
grams around at the same time, and to decide what to do next several
times a second, they took a much larger cut of computer resources
than batch operating systems.
Time-sharing did offer efficiencies in
return, however.
With many diverse users active
at one time,
the
various resources of a computer system—memory, disks, tape drives,
printers,
displays, and so on—could be kept busier than
in single-
program systems. More important, programmers could monitor the
runs of their creations, quickly stopping them when, as often happens
with new programs, they went awry. The most important efficiency
gains, however, were
for the customers rather than the machinery.
Instead of waiting hours for a test run of a program on a batch system,
a time-sharing user could watch the progress of a program, stop and
modify
it, and try again within minutes. This speed made possible a
highly experimental, and somewhat Pavlovian, style of programming,
characterized by quick punishment and reward cycles. A generation
of proficient computer hackers was born.
The hackers, some spending much of their waking lives at computer
terminals,
quickly added
to
the basic
capabilities
of
their
favorite
habitat. Entirely new uses for computers became the norm. Starting in
the mid-1960s, users could communicate among themselves, live from
terminal to terminal, or by electronic mail to be read and answered at
leisure. They could engage in interactive text and video games, play
sophisticated tricks on each other, share insights and programs, and
in general experience a sense of community through the unwitting
medium of their employers' machines. The community was enriched
by the creation of many public artifacts in the form of computer files
community
bulletin
boards,
witty quotes,
technical
hints,
original
writings,
amusing
programs,
and
interactive
information-retrieval
systems
to help
sort through
all
the
richness.
Some
of the more
sophisticated research systems also offered pictures and sounds from
the machine.
The Rise of Time-Sharing
- Time-sharing systems allowed multiple users to access computer resources simultaneously, trading raw processing power for increased human efficiency.
- The rapid feedback loop of time-sharing fostered a 'Pavlovian' style of programming, giving birth to the first generation of proficient computer hackers.
- Early digital communities emerged through terminal-to-terminal communication, electronic mail, and shared public artifacts like bulletin boards and games.
- Operating systems evolved through unplanned extensions and 'terse incantations' that were powerful for experts but opaque and exasperating for novices.
- The Unix system emerged from this hacker culture at Bell Labs and Berkeley to become a global standard for larger and upscale personal computers.
This speed made possible a highly experimental, and somewhat Pavlovian, style of programming, characterized by quick punishment and reward cycles.
Si/mbiosis
81
interruptions, and it would appear to each user that he had a computer
all to himself, albeit one that was a little slower than the raw machine.
A program that became temporarily inactive waiting for user response
would simplv be skipped by the operating system, with
little time
wasted.
Like the assemblers and
high-level languages before them, time-
sharing systems caused
considerable
controversy
in
the computer
community.
With their need
to keep the resources for several pro-
grams around at the same time, and to decide what to do next several
times a second, they took a much larger cut of computer resources
than batch operating systems.
Time-sharing did offer efficiencies in
return, however.
With many diverse users active
at one time,
the
various resources of a computer system—memory, disks, tape drives,
printers,
displays, and so on—could be kept busier than
in single-
program systems. More important, programmers could monitor the
runs of their creations, quickly stopping them when, as often happens
with new programs, they went awry. The most important efficiency
gains, however, were
for the customers rather than the machinery.
Instead of waiting hours for a test run of a program on a batch system,
a time-sharing user could watch the progress of a program, stop and
modify
it, and try again within minutes. This speed made possible a
highly experimental, and somewhat Pavlovian, style of programming,
characterized by quick punishment and reward cycles. A generation
of proficient computer hackers was born.
The hackers, some spending much of their waking lives at computer
terminals,
quickly added
to
the basic
capabilities
of
their
favorite
habitat. Entirely new uses for computers became the norm. Starting in
the mid-1960s, users could communicate among themselves, live from
terminal to terminal, or by electronic mail to be read and answered at
leisure. They could engage in interactive text and video games, play
sophisticated tricks on each other, share insights and programs, and
in general experience a sense of community through the unwitting
medium of their employers' machines. The community was enriched
by the creation of many public artifacts in the form of computer files
community
bulletin
boards,
witty quotes,
technical
hints,
original
writings,
amusing
programs,
and
interactive
information-retrieval
systems
to help
sort through
all
the
richness.
Some
of the more
sophisticated research systems also offered pictures and sounds from
the machine.
82
Mind Children
The hackers' intensive and varied computer use called for efficient
ways to find, start, and stop many different programs, to scan, read,
and modify information files, to interact with other users, and to ask
the computer to do many things automatically
In an evolutionary
process, the command languages with which users at their terminals
communicated with time-sharing operating systems were given these
abilities.
Designed by experts for experts, with layer upon laver of
unplanned extensions, controlled by terse and powerful but often in-
consistent, undocumented, and hard-to-remember incantations, these
systems often exasperated
the
less experienced
users.
To
a hacker
the interface with the computer was instinctive,
fast, and immensely
powerful—almost anything was possible to one who could construct
the right spells. But to those lacking the monomania required to keep
up with the system's rapid and amorphous evolution, the interface
was opaque, unhelpful, and very error-prone. The hackers got their
comeuppance when dissimilar systems were hooked together by com-
puter networks—even a hacker is a novice in another group's arcana.
A major success of the hacker era
is the Unix time-sharing system.
Created in the early 1970s by two young hackers at Bell Laboratories
and extended by others
at the University of California
at Berkeley,
it became, by the 1980s, the de-facto standard for larger computers.
Unix is now working its way into upscale personal computers.
Menus and Icons
From time to time computer manufacturers tried to incorporate other
hacker innovations into systems for their more staid customers. A
major goal often was to make the language that invoked the many
functions
of
the
operating system
as much
like
plain
English
as
possible, in the expectation that this would greatly ease the burden on
users already proficient in English. Such an effect had been observed
in the scientific community when high-level languages that used more
or less standard mathematical notation were introduced.
Dissenters
noted
that, unlike mathematics, natural English
is a poor language
for precise descriptions; communities requiring precision invariably
generate
their own
specialized conventions, mathematical notation
being the most obvious example.
This time
the nay-sayers were
right.
Experimental
English-like
interfaces (with long forgotten acronyms that tended
to include the
The Evolution of User Interfaces
- Early attempts to create English-like computer interfaces failed because natural language is too imprecise and requires common-sense knowledge programs lacked.
- Users found it easier to learn specialized command codes than to play a 'guessing game' with incomplete and undocumented language parsers.
- The multiple-choice menu emerged as a superior alternative for infrequent users, though it was initially slower than specialist languages.
- Xerox PARC researchers revolutionized interaction by developing high-resolution displays and the mouse to facilitate pointing rather than typing.
- The introduction of icons and graphical representations made systems more intuitive and partially language-independent, leading to the modern desktop metaphor.
The actual systems failed to understand (or positively misunderstood) many offered phrases, so that using them was often a guessing game.
82
Mind Children
The hackers' intensive and varied computer use called for efficient
ways to find, start, and stop many different programs, to scan, read,
and modify information files, to interact with other users, and to ask
the computer to do many things automatically
In an evolutionary
process, the command languages with which users at their terminals
communicated with time-sharing operating systems were given these
abilities.
Designed by experts for experts, with layer upon laver of
unplanned extensions, controlled by terse and powerful but often in-
consistent, undocumented, and hard-to-remember incantations, these
systems often exasperated
the
less experienced
users.
To
a hacker
the interface with the computer was instinctive,
fast, and immensely
powerful—almost anything was possible to one who could construct
the right spells. But to those lacking the monomania required to keep
up with the system's rapid and amorphous evolution, the interface
was opaque, unhelpful, and very error-prone. The hackers got their
comeuppance when dissimilar systems were hooked together by com-
puter networks—even a hacker is a novice in another group's arcana.
A major success of the hacker era
is the Unix time-sharing system.
Created in the early 1970s by two young hackers at Bell Laboratories
and extended by others
at the University of California
at Berkeley,
it became, by the 1980s, the de-facto standard for larger computers.
Unix is now working its way into upscale personal computers.
Menus and Icons
From time to time computer manufacturers tried to incorporate other
hacker innovations into systems for their more staid customers. A
major goal often was to make the language that invoked the many
functions
of
the
operating system
as much
like
plain
English
as
possible, in the expectation that this would greatly ease the burden on
users already proficient in English. Such an effect had been observed
in the scientific community when high-level languages that used more
or less standard mathematical notation were introduced.
Dissenters
noted
that, unlike mathematics, natural English
is a poor language
for precise descriptions; communities requiring precision invariably
generate
their own
specialized conventions, mathematical notation
being the most obvious example.
This time
the nay-sayers were
right.
Experimental
English-like
interfaces (with long forgotten acronyms that tended
to include the
Symbiosis
83
words "Plain" or "Simple" and "English") were researched during the
late 1960s and early 1970s but were not very successful.
It was (and is)
not yet possible to embody true, general language understanding, with
its underlying requirement of common sense and broad knowledge of
the world,
in a program.
The actual systems
failed
to understand
(or positively misunderstood) many offered phrases,
so
that using
them was often a guessing game.
It took skill to phrase requests so
they would be properly interpreted by their complex but incomplete
and
largely undocumented language
parsers.
Learning
a
simple,
consistent, special command code was easy by comparison.
Infrequent computer users (and specialists also) were better served
by the invention of a much simpler device—the multiple-choice menu.
In menu-driven systems,
the major options are presented
in a
list,
from which the user chooses one item.
This choice may lead to a
second menu outlining subsidiary
characteristics, and
so on,
until
the desired action
is fully specified.
Standard menu systems are not
without shortcomings.
It takes time both for the computer to print
and for the user to read long menus, and the choices may not always
be phrased in the most compatible manner. Menu systems therefore
tend to be slower than specialist languages operated by experienced
users.
Also,
it
is difficult to capture really complex ideas in a game
of twenty questions. Hybrid systems that once in a while prompt for
essay-type answers sometimes manage this problem fairly well.
The speed problem in printing menus was easy, if a little expensive,
to overcome:
it required simply the installation of faster-displaying
terminals. The new user's problem of quickly digesting long lists of
unfamiliar options did not admit of so straightforward a solution. An
excellent answer was explored and developed by hackers working in
the exceptionally luxurious quarters of the Xerox Palo Alto Research
Center (PARC). During the early 1970s this group developed expensive
workstations, each with
its own personal computer and large-screen
display, capable of fast and fine graphic imagery. With good graphics
and
lots of personal computer power available, rather fancy interac-
tions between user and computer became possible. For example, each
computer had a hand-held device, called a mouse, which could be slid
over a desktop like a hockey puck and which sensed this motion by
means of a small rolling ball protruding from
its base.
The motion
of the mouse was linked
to the motion of a graphic arrow on
the
computer's display screen, and the user could thus point out any part
84
Mind Children
of the screen to the computer. Pointing made menus more natural to
use. Instead of typing the Hne label of a menu item, one could simply
point to
it to make the selection.
Small suggestive pictures attached to each menu line on the com-
puter greatly eased the visual task of picking out the proper item and
made the system partly language-independent.
In
later versions of
this idea, the images, now referred to as
icotts, became the dominant
representation, with words relegated to a small annotation. Eventually
icons could be moved around the screen like objects and placed into
other
icons
that
functioned
as
containers
or markers
for physical
destinations like printers.
Icon interfaces proved effective and easy
to use for novices and experts alike, probably because they tapped
the nonverbal object manipulation skills of humans.
Providing each user with a separate computer had many implica-
tions, some of them confusing. Was
it not a step backward from time-
sharing?
Several of the pioneers of time-sharing certainly thought
so. The enthusiasts at PARC pointed out that, seen as a convenience
for the user, time-sharing was seriously flawed.
It immobilized the
habitual user by tying him to a fixed terminal physically connected to
a huge machine.
Worse, the responsiveness of time-sharing systems
had never lived up to their early promise; the number of users on the
computer, and the overhead of the time-sharing system itself, invari-
ably crept up until individuals found themselves waiting seconds, and
even minutes, for the machine to respond to the most trivial requests.
A small personal machine
to handle the routine functions seemed
plausible, given the rapidly declining cost of computers.
Alan Kay, the guru of the PARC group, originally envisaged a highly
responsive, book-size personal computer (dubbed the Dynabook for
its dynamic
qualities)
with
a
high-resolution
color
display and
a
radio
link
to
a worldwide computer network.
Much more
than
just a computer, the Dynabook would function as secretary, mailbox,
reference
library, amusement center, and telephone.
This idea was,
and
still
is, beyond the capabilities of the technology (though
I am
typing these very words into a book-sized portable computer as
I sit
in a hotel lobby).
The expensive PARC personal computers were desk- rather than
book-size, had only black and white graphics, and offered less com-
puting power than their designers desired.
Nevertheless, they were
a clear step toward the vision of the Dynabook. They were initially
The Birth of Personal Computing
- Icon-based interfaces revolutionized computing by leveraging innate human nonverbal object manipulation skills.
- The shift from time-sharing to personal computers addressed the frustrations of system lag and physical tethering to large mainframes.
- Alan Kay's 'Dynabook' concept envisioned a portable, networked device serving as a library, mailbox, and amusement center.
- The Xerox Alto and Star served as expensive precursors that eventually influenced Steve Jobs and the development of the Apple Macintosh.
- The Macintosh popularized graphical user interfaces, making them the standard for all subsequent operating systems in the late 1980s.
- Future computing challenges involve maintaining portability while expanding the sensory involvement of the user beyond small screens.
The enthusiasts at PARC pointed out that, seen as a convenience for the user, time-sharing was seriously flawed.
84
Mind Children
of the screen to the computer. Pointing made menus more natural to
use. Instead of typing the Hne label of a menu item, one could simply
point to
it to make the selection.
Small suggestive pictures attached to each menu line on the com-
puter greatly eased the visual task of picking out the proper item and
made the system partly language-independent.
In
later versions of
this idea, the images, now referred to as
icotts, became the dominant
representation, with words relegated to a small annotation. Eventually
icons could be moved around the screen like objects and placed into
other
icons
that
functioned
as
containers
or markers
for physical
destinations like printers.
Icon interfaces proved effective and easy
to use for novices and experts alike, probably because they tapped
the nonverbal object manipulation skills of humans.
Providing each user with a separate computer had many implica-
tions, some of them confusing. Was
it not a step backward from time-
sharing?
Several of the pioneers of time-sharing certainly thought
so. The enthusiasts at PARC pointed out that, seen as a convenience
for the user, time-sharing was seriously flawed.
It immobilized the
habitual user by tying him to a fixed terminal physically connected to
a huge machine.
Worse, the responsiveness of time-sharing systems
had never lived up to their early promise; the number of users on the
computer, and the overhead of the time-sharing system itself, invari-
ably crept up until individuals found themselves waiting seconds, and
even minutes, for the machine to respond to the most trivial requests.
A small personal machine
to handle the routine functions seemed
plausible, given the rapidly declining cost of computers.
Alan Kay, the guru of the PARC group, originally envisaged a highly
responsive, book-size personal computer (dubbed the Dynabook for
its dynamic
qualities)
with
a
high-resolution
color
display and
a
radio
link
to
a worldwide computer network.
Much more
than
just a computer, the Dynabook would function as secretary, mailbox,
reference
library, amusement center, and telephone.
This idea was,
and
still
is, beyond the capabilities of the technology (though
I am
typing these very words into a book-sized portable computer as
I sit
in a hotel lobby).
The expensive PARC personal computers were desk- rather than
book-size, had only black and white graphics, and offered less com-
puting power than their designers desired.
Nevertheless, they were
a clear step toward the vision of the Dynabook. They were initially
Symbiosis
85
named Interim Dynabooks, but
later,
mercifully, acquired the more
melodious name of Alto.
Xerox was slow
to commercialize
the
discoveries
of
the PARC
group,
though
in
the
late
1970s
they
did produce one expensive
business workstation (named Star) that embodied many of the PARC
ideas.
After ten years of research, some of the PARC
enthusiasts
grew frustrated with the corporate sluggishness of Xerox and found
a
sympathetic
ear
in Steve
Jobs,
co-founder
of
the nearby Apple
computer company.
The
result,
a few years
later, was
the Apple
Lisa and,
later,
its smarter younger sibling, the Macintosh, billed as
the personal computer "for the rest of us."
Though
still far from a
Ovnabook
in
capability,
it introduced
a new way of computing
to
millions of people—and paved the way for a new phase of human-
computer
interaction.
In
the
late
1980s almost
all new operating
systems
for graphically
oriented computers
are being designed
to
present a Macintosh-style face to the user.
Magic Glasses
The graphical
interface
that makes the Macintosh and
its imitators
so much more pleasant
to use than
earlier machines demonstrates
the
value
of engaging
the
sensor}^
capabilities
of humans
in
the
dialogue between them and their machines.
Alan Kay's Dynabook,
though wonderful
in manv
ways, would
be unable
to
go much
further than existing svstems in this nonverbal direction because of its
physical limitations, particularlv the book-size viewscreen.
As with
a conventional book,
portability
is a kev feature of the Dynabook;
many of
its proposed uses would vanish
if
it existed onlv in fixed
locations like home or work. Can this portabilitv be retained while at
the same time the owner's sensory involvement is greatlv expanded?
In other words, can we imagine a computer that takes advantage of the
mobihty of humans, while allowing humans to take advantage of the
superior memory, calculating power, and expanded communications
range of the computer?
Of course we can—not in the form of a book, however, but in the
form
of a high-tech wardrobe.
The key item
of apparel
is
a
pair
of magic glasses
(or,
in
the
primitive
stages,
goggles
or
a
helmet).
Worn on the nose like conventional specs, these contain the following
impressive array of instrumentation:
The Magic Wardrobe
- The author proposes a high-tech wardrobe consisting of magic glasses, gloves, and a motorized coat to bridge the gap between humans and computers.
- Magic glasses would feature high-resolution displays, multiple cameras, and navigation systems to overlay synthetic imagery onto the real world.
- The system includes a high-speed data link to a global network, allowing for real-time information retrieval and communication with other users.
- Magic gloves use pressure grids and temperature elements to simulate the tactile sensation of objects that are not physically present.
- A motorized coat would complete the ensemble by providing resistance to arm movements, creating a full-body sense of presence in a virtual environment.
- While these requirements are demanding, the author notes that every individual function already exists in research or military applications like helicopter HUDs.
Each finger of the glove contains a grid of elements that create patterns of pressure and temperature on the finger of the wearer.
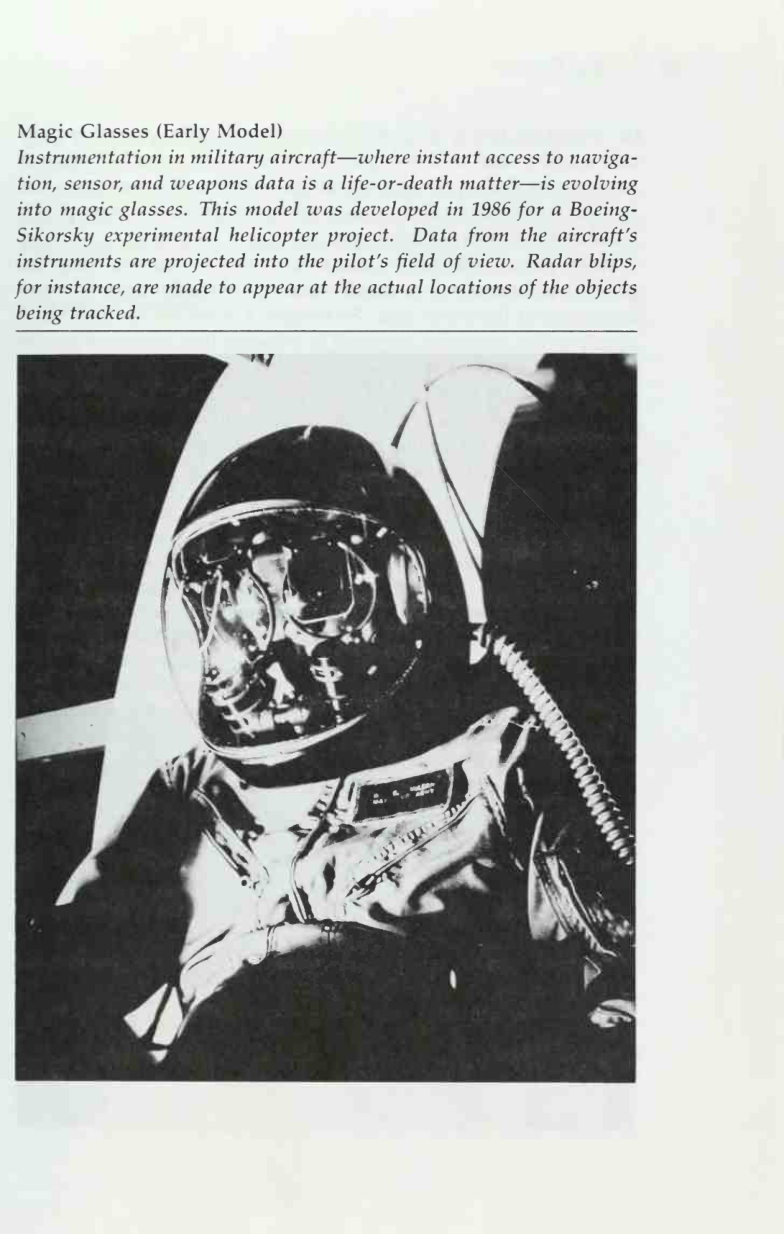
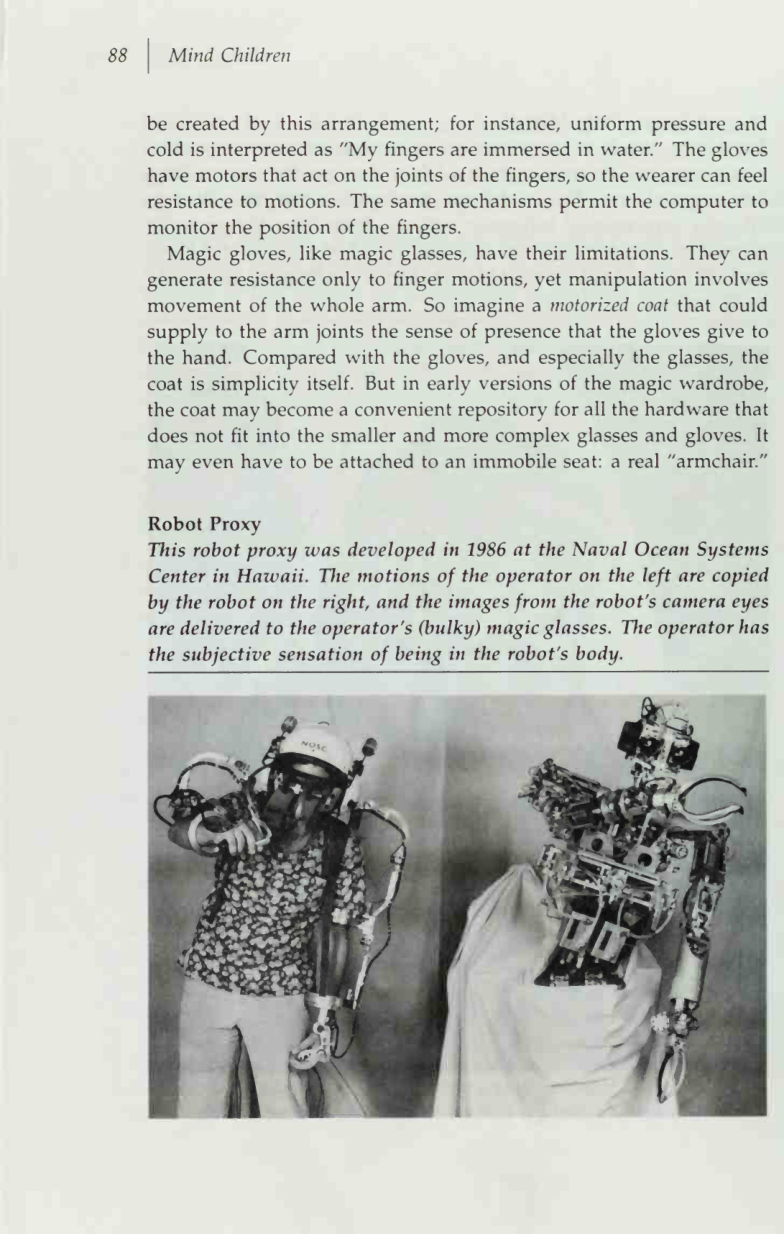
Symbiosis
85
named Interim Dynabooks, but
later,
mercifully, acquired the more
melodious name of Alto.
Xerox was slow
to commercialize
the
discoveries
of
the PARC
group,
though
in
the
late
1970s
they
did produce one expensive
business workstation (named Star) that embodied many of the PARC
ideas.
After ten years of research, some of the PARC
enthusiasts
grew frustrated with the corporate sluggishness of Xerox and found
a
sympathetic
ear
in Steve
Jobs,
co-founder
of
the nearby Apple
computer company.
The
result,
a few years
later, was
the Apple
Lisa and,
later,
its smarter younger sibling, the Macintosh, billed as
the personal computer "for the rest of us."
Though
still far from a
Ovnabook
in
capability,
it introduced
a new way of computing
to
millions of people—and paved the way for a new phase of human-
computer
interaction.
In
the
late
1980s almost
all new operating
systems
for graphically
oriented computers
are being designed
to
present a Macintosh-style face to the user.
Magic Glasses
The graphical
interface
that makes the Macintosh and
its imitators
so much more pleasant
to use than
earlier machines demonstrates
the
value
of engaging
the
sensor}^
capabilities
of humans
in
the
dialogue between them and their machines.
Alan Kay's Dynabook,
though wonderful
in manv
ways, would
be unable
to
go much
further than existing svstems in this nonverbal direction because of its
physical limitations, particularlv the book-size viewscreen.
As with
a conventional book,
portability
is a kev feature of the Dynabook;
many of
its proposed uses would vanish
if
it existed onlv in fixed
locations like home or work. Can this portabilitv be retained while at
the same time the owner's sensory involvement is greatlv expanded?
In other words, can we imagine a computer that takes advantage of the
mobihty of humans, while allowing humans to take advantage of the
superior memory, calculating power, and expanded communications
range of the computer?
Of course we can—not in the form of a book, however, but in the
form
of a high-tech wardrobe.
The key item
of apparel
is
a
pair
of magic glasses
(or,
in
the
primitive
stages,
goggles
or
a
helmet).
Worn on the nose like conventional specs, these contain the following
impressive array of instrumentation:
Mind Children
High-resolution color displays, one for each eye, with optics that
cover the entire
field and make the image the computer presents
appear to be focused
at a comfortable distance.
The glasses may
have the ability to switch to a transparent mode.
Three TV cameras. A high-resolution pair with forward-looking,
wide-angle lenses
is placed as close to the position of the eyes as
possible, so that one can see where one is going when the cameras
are connected to the corresponding display screens on the lenses.
Perhaps a third very wide angle camera looks back to register most
of the wearer's face, allowing the computer, and any videophone
communicants, to monitor the wearer's facial expressions.
Microphones and small earphones in the frames.
A navigation system
that accurately and continuously tracks the
position and orientation of the glasses (and consequently the head
of the wearer).
A powerful computer that can generate realistic synthetic imagery,
sound, and speech; understand spoken commands; and identify and
track objects in the field of view of the cameras.
A high-speed data link to a worldwide network of computers and
electronic libraries, as well as to magic glasses worn by others.
It does not take an expert
to recognize that
this
is a demanding
set of requirements.
Yet every one of these functions exists and
is
the subject of extensive, well-funded
research.
Squeezing
it
into a
tiny package
is also challenging but not implausible
in
this day of
cassette-box Walkmans and pocket
televisions.
The glasses
let the
computer control what you see and hear, in response to your verbal
requests, and to keep track of your wanderings; they also allow
it to
watch your hands moving, and your facial expressions, though they
cannot control what you
feel with your hands.
Since touching
is an
important source of information about the world,
it would be nice if
a computer let us know what things feel like, even when they are not
in our immediate environment. Enter magic gloves.
Like
the
glasses,
the gloves
are
a
tour-de-force
of technological
wizardry.
Each finger of the glove contains a grid of elements that
create patterns of pressure and temperature on the finger of the wearer.
Physiological experiments have shown that realistic impressions can
Magic Glasses (Early Model)
Instrumentation in military aircraft—where instant access to naviga-
tion, sensor, and weapons data
is a life-or-death matter— is evolving
into magic glasses.
This model was developed in 1986 for a Boeing-
Sikorsky experimental helicopter project.
Data from
the
aircraft's
instruments are projected into the pilot's field of view. Radar blips,
for instance, are made to appear at the actual locations of the objects
being tracked.
Mind Children
be created by this arrangement;
for instance, uniform pressure and
cold is interpreted as "My fingers are immersed in water." The gloves
have motors that act on the joints of the fingers, so the wearer can feel
resistance to motions. The same mechanisms permit the computer to
monitor the position of the fingers.
Magic gloves, like magic glasses, have their limitations.
They can
generate resistance only to finger motions, yet manipulation involves
movement of the whole arm. So imagine a motorized coat that could
supply to the arm joints the sense of presence that the gloves give to
the hand. Compared with the gloves, and especially the glasses, the
coat is simplicity
itself. But in early versions of the magic wardrobe,
the coat may become a convenient repository for all the hardware that
does not
fit into the smaller and more complex glasses and gloves.
It
may even have to be attached to an immobile seat: a real "armchair."
Robot Proxy
This robot proxy was developed in 1986 at the Naval Ocean Systems
Center in Hawaii. The motions of the operator on the left are copied
by the robot on the right, and the images from the robot's camera eyes
are delivered to the operator's (bulky) magic glasses. The operator has
the subjective sensation of being in the robot's body.
The Robot Proxy and Navigation
- Early telepresence technology utilized robot proxies that mirrored human movements and transmitted visual data to bulky headsets.
- Future wearable hardware is predicted to evolve from immobile stations to portable suits that integrate seamlessly with daily life.
- Smart glasses will feature sophisticated navigation systems using radio beacons and acceleration sensors to track the wearer's location.
- The 'Yellow Brick Road' program provides an augmented reality interface, overlaying directional lines and safety warnings onto the user's field of vision.
- Personalized data sharing allows users to navigate private trails and unmapped areas using coordinates provided by friends.
- Integrated communication and navigation software work in parallel to assist users during travel emergencies and remote arrivals.
The operator has the subjective sensation of being in the robot's body.
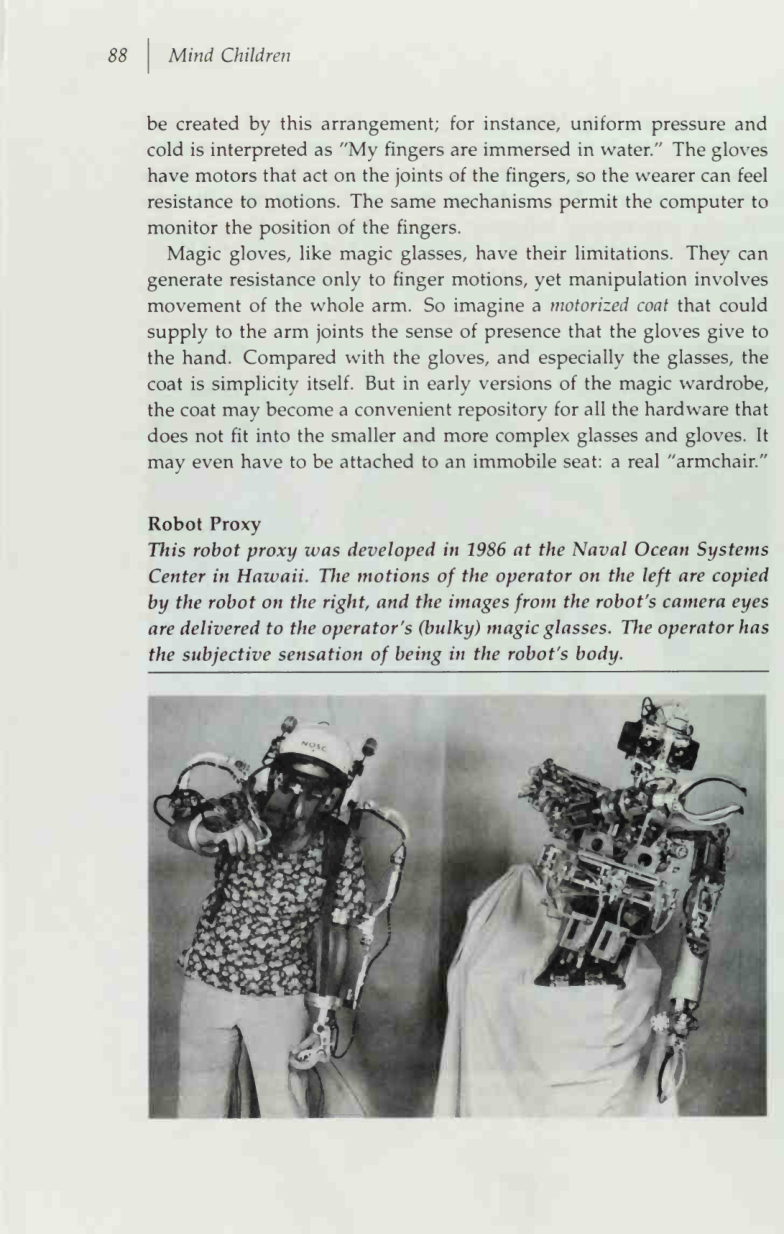
Mind Children
be created by this arrangement;
for instance, uniform pressure and
cold is interpreted as "My fingers are immersed in water." The gloves
have motors that act on the joints of the fingers, so the wearer can feel
resistance to motions. The same mechanisms permit the computer to
monitor the position of the fingers.
Magic gloves, like magic glasses, have their limitations.
They can
generate resistance only to finger motions, yet manipulation involves
movement of the whole arm. So imagine a motorized coat that could
supply to the arm joints the sense of presence that the gloves give to
the hand. Compared with the gloves, and especially the glasses, the
coat is simplicity
itself. But in early versions of the magic wardrobe,
the coat may become a convenient repository for all the hardware that
does not
fit into the smaller and more complex glasses and gloves.
It
may even have to be attached to an immobile seat: a real "armchair."
Robot Proxy
This robot proxy was developed in 1986 at the Naval Ocean Systems
Center in Hawaii. The motions of the operator on the left are copied
by the robot on the right, and the images from the robot's camera eyes
are delivered to the operator's (bulky) magic glasses. The operator has
the subjective sensation of being in the robot's body.
Symbiosis
89
Later the coat will be as portable as a spacesuit, and eventually
it will
resemble a leisure suit.
As with existing computers, the wonderful hardware just outlined is
only as useful as its software.The following sections present programs
you might want to run when wearing your smart new outfit.
Finding Oneself
1 don't know about you, but
I often get
lost.
Lacking a good built-
in sense of direction,
I long for a pocket navigational aid that would
not only
tell me where
I am (electronic maps now appearing in cars
already do
this) but would guide me to my destination, remember
where I've been, and remind me of my grocery list when it notices I'm
close to the store. The glasses contain a navigation system, probably
a combination of a device that measures the distance to ground and
orbiting beacons by radio and one that notes acceleration forces to
deduce motion. However it is done, the navigator knows where you,
the wearer of the glasses, are at any time.
Robin and
the family have changed summer places
since
the
last time
you
visited and now live somewhere in
the backwoods.
This
is unfamiliar
territory, and for once you really appreciate the glowing green line generated
by the Yellow Brick Road program that guides you down the highway.
The
line veers into the right-hand lane, heading into a turnoff about a half-mile
ahead.
Just
in case you didn't
notice, a flashing right turn arrow hovers
over the
intersection, and
the program whispers "Turn approaching, slow
to 30"
into your
ear.
A mile after
the turn
the asphalt becomes gravel,
presaged by a color change in the guideline from green
to a more cautious
(and metaphorically correct) yellow.
Later still, the line becomes red, and the
road
dirt.
The program announces "Switching
to private map" indicating
that
the Rand McNally database does not yet contain
this
little
trail;
the
data comes from Robin's personal files. "Four miles to Robin's," the program
offers, momentarily interrupting the old Beatles tune
it's been playing.
It's
getting
dark.
"Initiate phone—Robin,"
you
say
to
the computer
on
your
nose.
This
starts
a
telephone program
that
connects
via
the
cellular/satellite
network.
The
Yellow
Brick Road program
continues
in
parallel.
"Tm almost
there," you
tell Robin.
"Great.
Dinner's just about
ready.
Do you
like
rice or potatoes?"
"Both?"
"Ok,
see you!"
"Bye."
"Bye." The phone program terminates. The red guideline winds among the
90
Mind Children
trees.
The headlights are on but don't penetrate very far.
Suddenly the car
lurches
to the
left.
You've hit something, perhaps a
rock
in
the road, and
now your front wheel
is stuck in a muddy
rut.
Trying
to drive out mires
you more firmly.
"Display map," you ask of the navigation program.
The
requested map hangs
in
the air before you. A
little picture of your car on
it shows you about two miles from your destination as the road meanders,
though less than a half mile on a straight path through the woods.
"Hi Robin, me again. I'm in trouble." After considering the predicament,
Robin suggests an adventurous dinner-saving course. "We can deal with the
car in the morning.
Last week Marty and I found a short-cut to near where
you are. You should be able to walk here in under half an hour." Hardy soul
that you are, you agree.
The record of the path
is transferred from Robin's
computer to yours over the phone connection. Your navigation program links
the short-cut route with the road data, and the original guideline
is replaced
by one that runs down the road for a distance, then snakes off into the woods.
You lock your car and follow the line.
It
is very dark, so you activate the night-vision program—the cameras in
your glasses are run at maximum sensitivity and deliver enhanced images
to the screens, added
to the output of the navigator.
You see that the red
guideline follows a faint trail through the woods. Except for a few scratches,
the walk
is uneventful. The meal
is warm and delicious.
Going Places
Transportation and communication have improved awesomely in the
last 500
years.
Yet geography,
while no
longer being
the major
determinant of commerce,
still
restricts how and with whom most
of us conduct our affairs. The differences between transportation and
communication will become less distinct as we become more able to
project our full awareness and skills to remote locations. The ease of
such projection will allow common interest to be the primary spur to
association. The magic wardrobe can be used to visit both real places
in the world and "unreal" locations deep inside computer simulations.
The most obvious form of remote presence involves a physical robot
proxy—a distant robot that you control via the global communications
network.
The magic glasses allow you
to see through the robot's
eyes, the coat and gloves permit you to feel, gesture, and act through
the robot's manipulators, and foot controls on your armchair let you
drive the robot around.
By renting proxies at remote locations, you
The Future of Remote Presence
- Advanced navigation and night-vision programs will allow individuals to traverse physical environments with digital overlays.
- The distinction between transportation and communication will blur as we project our awareness and skills to remote locations.
- Physical robot proxies controlled via global networks will enable people to work and visit distant sites without leaving home.
- Human proxies wearing sensory suits could allow 'armchair travelers' to experience sight, sound, and touch from a remote field agent.
- Computer-simulated 'unreal estate' will provide limitless environments for design, exploration, and collaboration beyond physical laws.
- Remote expertise can be applied to local problems by allowing a distant participant to take control of a field agent's motor functions.
But when the task called for a manual skill better known to the stay-at-home, the field agent would relax and allow the remotely controlled suit motors to do the job—as if possessed by a spirit.
90
Mind Children
trees.
The headlights are on but don't penetrate very far.
Suddenly the car
lurches
to the
left.
You've hit something, perhaps a
rock
in
the road, and
now your front wheel
is stuck in a muddy
rut.
Trying
to drive out mires
you more firmly.
"Display map," you ask of the navigation program.
The
requested map hangs
in
the air before you. A
little picture of your car on
it shows you about two miles from your destination as the road meanders,
though less than a half mile on a straight path through the woods.
"Hi Robin, me again. I'm in trouble." After considering the predicament,
Robin suggests an adventurous dinner-saving course. "We can deal with the
car in the morning.
Last week Marty and I found a short-cut to near where
you are. You should be able to walk here in under half an hour." Hardy soul
that you are, you agree.
The record of the path
is transferred from Robin's
computer to yours over the phone connection. Your navigation program links
the short-cut route with the road data, and the original guideline
is replaced
by one that runs down the road for a distance, then snakes off into the woods.
You lock your car and follow the line.
It
is very dark, so you activate the night-vision program—the cameras in
your glasses are run at maximum sensitivity and deliver enhanced images
to the screens, added
to the output of the navigator.
You see that the red
guideline follows a faint trail through the woods. Except for a few scratches,
the walk
is uneventful. The meal
is warm and delicious.
Going Places
Transportation and communication have improved awesomely in the
last 500
years.
Yet geography,
while no
longer being
the major
determinant of commerce,
still
restricts how and with whom most
of us conduct our affairs. The differences between transportation and
communication will become less distinct as we become more able to
project our full awareness and skills to remote locations. The ease of
such projection will allow common interest to be the primary spur to
association. The magic wardrobe can be used to visit both real places
in the world and "unreal" locations deep inside computer simulations.
The most obvious form of remote presence involves a physical robot
proxy—a distant robot that you control via the global communications
network.
The magic glasses allow you
to see through the robot's
eyes, the coat and gloves permit you to feel, gesture, and act through
the robot's manipulators, and foot controls on your armchair let you
drive the robot around.
By renting proxies at remote locations, you
Symbiosis
91
can visit, talk, and work at widely scattered projects without leaving
the comforts
of home and without incurring the physical
risks of
dangerous locations or the boredom of long trips.
A twist on the proxy idea is a human proxy. Someone traveling to an
interesting locale and wearing a special kind of magic wardrobe would
be able to transmit their view, sound, touch, and perhaps odor im-
pressions to the armchair traveler.
In its simplest form, the link is one
way, from proxy to passive observer.
Such one-way communication
can be recorded and played back at will—giving us a plausible form
of the "feelie" extension to the "movie." Alternatively, the connection
could be two-way, with motor actions and sense impressions, suitably
edited by a clever program, transmitted bidirectionally. Inexperienced
participants are likely to find themselves as amusingly uncoordinated
as in a three-legged race, but training may permit an intimate kind of
teamwork, with remote expertise being brought to bear at the location
of the problem. Most of the time the "field agent" would be in control
of the movements, while the armchair participant would watch, listen,
feel, and give advice. But when the task called for a manual skill better
known to the stay-at-home, the field agent would relax and allow the
remotely controlled suit motors to do the job—as
if possessed by a
spirit.
A proxv meeting need not be in the real world—many things can
be done better in computer simulation. Computer generated "unreal
estate" has no intrinsic limits either in extent or in physical properties.
It
is
a world where magic
is
routine.
Today's computer
screens
allow peeks into
this world—car designers examine future models,
physicists view the interior of nuclear explosions, and Macintosh users
rearrange their
files on an unreal space called a "desktop."
With a
magic wardrobe, we will be able to go boldy into such worlds and
explore them from the inside.
Your (modest) dream home is finally becoming a reality. The preliminaries
with
the
architect were done weeks
ago, and an
eagerly
anticipated
call
arrives: "Hi there.
I've got a tentative design. Do you have time to look
it
over?"
"You bet!"
"Ok,
lets switch
to the site.
Initiate Scene M5."
After
a few seconds the computer in your glasses prompts "Allow scene change?"
"Allow," you confirm.
A pretty good rendition of the lot and
its neighborhood surrounds you.
"I
thought we'd put the house over here. That gives a nice front and rear yard,
Unreal Estate and Bare-Hands Programming
- A futuristic architectural simulation allows a client to walk through a virtual home, modifying materials and layouts in real-time.
- The simulation uses 'magic glasses' and high-performance computing to render 3D models that respond to user interaction and environmental variables like seasons.
- The text suggests that master-level expertise in any field, even abstract ones like physics, relies on physical intuition and sensory-motor brain functions.
- Einstein is cited as an example of a thinker who 'felt' the meaning of equations in his body as if they were solid objects.
- The sensory and motor portions of the brain are described as a 'hidden powerhouse' with a million times the computational power of conscious thought.
Einstein, for instance, reported that he could often feel the meaning of his equations in his arms and his body as if they were solid objects.
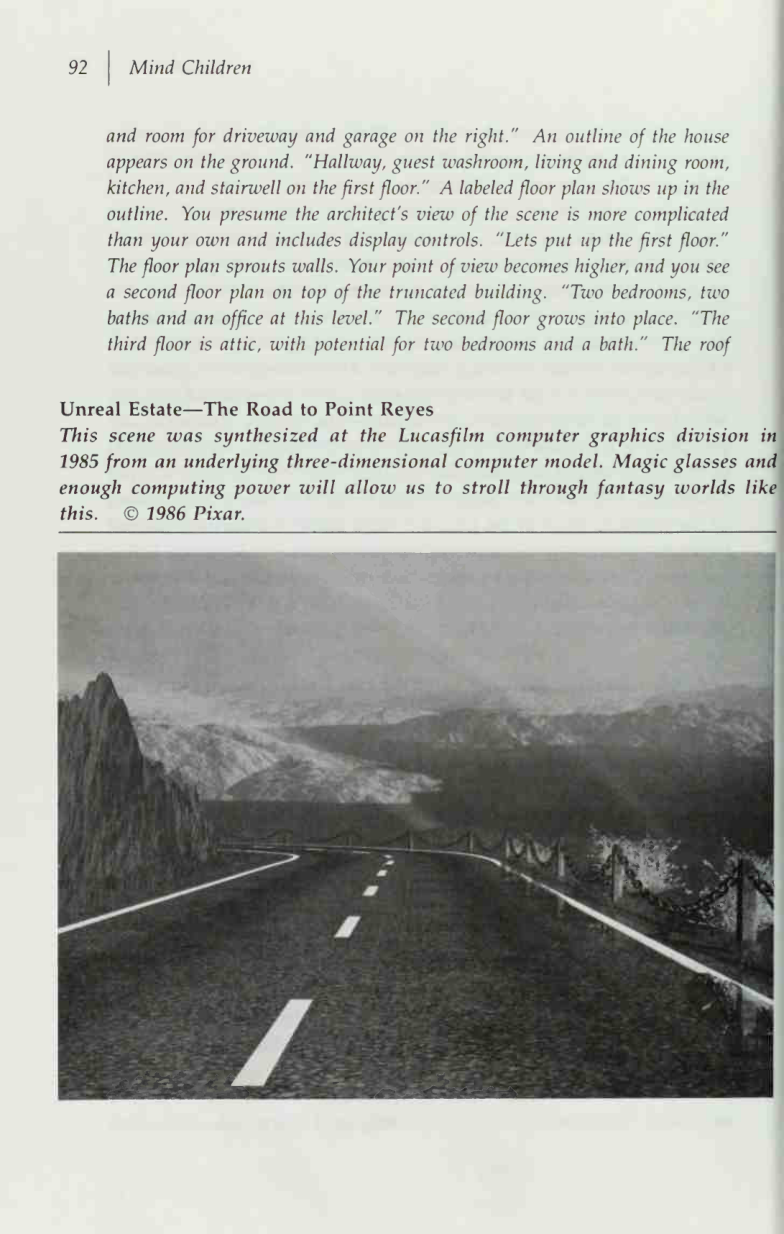
Symbiosis
91
can visit, talk, and work at widely scattered projects without leaving
the comforts
of home and without incurring the physical
risks of
dangerous locations or the boredom of long trips.
A twist on the proxy idea is a human proxy. Someone traveling to an
interesting locale and wearing a special kind of magic wardrobe would
be able to transmit their view, sound, touch, and perhaps odor im-
pressions to the armchair traveler.
In its simplest form, the link is one
way, from proxy to passive observer.
Such one-way communication
can be recorded and played back at will—giving us a plausible form
of the "feelie" extension to the "movie." Alternatively, the connection
could be two-way, with motor actions and sense impressions, suitably
edited by a clever program, transmitted bidirectionally. Inexperienced
participants are likely to find themselves as amusingly uncoordinated
as in a three-legged race, but training may permit an intimate kind of
teamwork, with remote expertise being brought to bear at the location
of the problem. Most of the time the "field agent" would be in control
of the movements, while the armchair participant would watch, listen,
feel, and give advice. But when the task called for a manual skill better
known to the stay-at-home, the field agent would relax and allow the
remotely controlled suit motors to do the job—as
if possessed by a
spirit.
A proxv meeting need not be in the real world—many things can
be done better in computer simulation. Computer generated "unreal
estate" has no intrinsic limits either in extent or in physical properties.
It
is
a world where magic
is
routine.
Today's computer
screens
allow peeks into
this world—car designers examine future models,
physicists view the interior of nuclear explosions, and Macintosh users
rearrange their
files on an unreal space called a "desktop."
With a
magic wardrobe, we will be able to go boldy into such worlds and
explore them from the inside.
Your (modest) dream home is finally becoming a reality. The preliminaries
with
the
architect were done weeks
ago, and an
eagerly
anticipated
call
arrives: "Hi there.
I've got a tentative design. Do you have time to look
it
over?"
"You bet!"
"Ok,
lets switch
to the site.
Initiate Scene M5."
After
a few seconds the computer in your glasses prompts "Allow scene change?"
"Allow," you confirm.
A pretty good rendition of the lot and
its neighborhood surrounds you.
"I
thought we'd put the house over here. That gives a nice front and rear yard,
92
Mind Children
and room for driveway and garage on
the right." An outline of the house
appears on the ground.
"Hallway, guest washroom, living and dining room,
kitchen, and stairwell on the first floor." A labeled floor plan shows up in the
outline.
You presume the architect's view of the scene
is more complicated
than your own and includes display controls.
"Lets put up the first floor."
The floor plan sprouts walls. Your point of view becomes higher, and you see
a second floor plan on top of the truncated building.
"Two bedrooms, two
baths and an office at this level."
The second floor grozvs into place.
"The
third floor
is attic, with potential for two bedrooms and a bath."
The roof
Unreal Estate—The Road to Point Reyes
This
scene was
synthesized
at
the Lucasfilm computer graphics
division
in'
1985 from an underlying three-dimensional computer model. Magic glasses and
enough computing power will allow us to stroll through fantasy worlds
like
this.
© 1986 Pixar.
Symbiosis
93
finishes
the assembly, and a
bit of landscapitjg
is added.
Drifting back
to
ground
level and around
the house, you
take in
the scene.
"Could we try
that in brick?" The walls change from cut stone facing to brick.
"The back
yard looks a
little small.
Could we move things forward?"
"We can't get
too far out of line with the neighbors, but
I think I can give you 15 feet."
The house slides forward.
"That's better.
Let's go inside."
The front door swings open.
You note a
light switch on
the right and
reach
to
flip
it. A stick-figure caricature of a hand connects, and the hall
is
illuminated.
The view from
the living-room windows
is
not
inspiring.
"Could we have a bay window here, maybe, instead of this one?" "Hold on a
sec, ni have to set that one up." You drift into the kitchen, which looks pretty
spacious, then examine the dining room.
"Wiridow's ready." The living room
looks better with sunlight streaming in the bay window.
"What season do
you have set?"
"Realtime.
Let's cycle through a year." The lighting changes
through morning and afternoons
in
all four seasons
arid
the winter scene
is particularly cheery.
After a quick tour of the upstairs, with a few wall
color changes, you bid goodbye.
"Til leave a copy.
You'll be able
to make
cosmetic changes and fiddle with the furniture; don't worry about ruining
the design—the program will preveyit you from doing anything silly."
"The
family will be thrilled this evening.
Talk to you later."
Bare-Hands Programming
Skilled
practitioners
in many
fields
report
that they
see or
feel
the
object
of
their work
as
they think about
it.
This
is
not
a
great
surprise in occupations that concern physical objects or situations
sculpture or
sports,
say,
or mechanical design.
It
is
less expected
in supposedly abstract
fields
like music, language, mathematics, or
theoretical physics.
Yet Einstein, for instance, reported that he could
often feel the meaning of his equations in his arms and his body as
if
they were solid objects.
As
1 suggested
in Chapter
1,
the
large,
highly evolved sensory
and motor portions of the brain seem to be the hidden powerhouse
behind human thought.
By
virtue
of the great
efficiency
of these
billion-year-old structures, they may embody one million times the
effective computational power of the conscious part of our minds.
While novice performance can be achieved using conscious thought
alone, master-level expertise draws on the enormous hidden resources
of these old and specialized areas. Sometimes some of that power can
Harnessing Sensory Intuition
- Expert performance can be improved by creating explicit external metaphors that tap into instinctive human skills.
- Interactive pictorial interfaces and 'magic glasses' offer the potential for full sensory involvement in complex problem-solving.
- The author envisions a virtual landscape where files and data are represented as physical objects like boulders and hills.
- Complex physics simulations are built by physically manipulating components and formulas within a three-dimensional virtual space.
- Abstract mathematical relationships are given tangible forms, such as arrows that calculate distance or formulas that 'spring' from the landscape.
In the foreground, on a grassy green meadow, are variously sized, colored, and shaped boulders labeled 'Budget,' 'Drawings,' 'Games,' and so on.
94
Mind Children
be harnessed by finding and developing a useful mapping between
the problem and a sensory intuition.
Although some individuals, through lucky combinations of inher-
itance and opportunity, have developed expert intuitions
in certain
fields, most of us are amateurs
at most
things.
What we need
to
improve our performance
is explicit external metaphors that can tap
our instinctive skills in a direct and repeatable way. Graphs, rules of
thumb, physical models illustrating relationships, and other devices
are widely and
effectively used
to enhance comprehension and
re-
tention. More recently, interactive pictorial computer interfaces such
as those used in the Macintosh have greatly accelerated learning in
novices and eased machine use for the experienced. The full sensory
involvement possible with magic glasses may enable us to go much
further in this direction. Finding the best metaphors will be the work
of a generation; for now, we can amuse ourselves by guessing.
The familiar landscape of the top level of your file system
lies ahead.
In
the foreground, on
a grassy green
meadozc,
are
variously
sized,
colored,
and shaped boulders labeled "Budget,"
"Drqwings," "Games," and so on.
In
the fog-shrouded distance are
large
hills emblazoned
"Oxford
English
Dictionary" and
"Encyclopedia
Britannica."
Two knocks on
the
"Space"
boulder cause
it
to expand and
to open a portal
in
its
side.
Wlmt might
be taken for an asteroid belt
is visible through the portal. One of the rocks
floating
in
the blackness
is
labeled
"Skyhooks."
You
drift up
to
it, knock
twice, and enter. A pretty blue and white earth, and some less pretty bits of
variously shaped debris, greet you.
This
is an unfinished project, and some
of your less successful experiments have yet to be laid to rest.
Today's problem
is
to develop a simulation
of a long and strong cable
orbiting
the
earth.
The cable has mass and a
certain
stretch.
It can
be
approximated (you've learned) by stringing together large numbers of simple
springs and even simpler weights. A simple spring joins
tzvo points and
exerts a force on them proportional to the amount of elongation from a
rest
length. A mass has a position and a velocity that changes in proportion to an
applied force in accordance with Nezvton's three laws of motion. The formula
for a spring is F = K (L
- 1,,) where L
is the spring's current length and L„ is
its unstretched length. K is the spring constant: a larger K makes the spring
harder to stretch. F
is the force exerted by the spring on
its endpoints.
This
relation
is among the debris that litters the landscape. You begin by choosing
Symbiosis
95
some compwnents you've constructed
in
the past. A point
is imaged as a
small black dot that hangs in space (internally
it has three numbers giving
its X,
Y, and Z coordinates, but
that was yesterday's concern).
Tapping
on the point and saying "Duplicate!"
gives you a second one.
These will
represent the two ends of the spring.
You fetch a length arroiv;
it looks
like a
line with an arrozvhead at each
end and a number
(its length)
in the middle.
Fasten
its two heads
to your
two points and
it calculates the distance between them.
Taking
it for a spin,
you grab one of the points and move
it around. The arrow follows the point
and the length number changes obediently.
Tapping
it you say
"Call
this
L." The dimension changes
to the syynbol
L. "Attach spring formula," you
command, and a copy
of the formula springs from
the landscape,
settles
nearby, and begins
to respond
to the distance between the points.
Slots for
the variables K and
L^-^ appear, and you give them
values.
"Vectorize"
is
another prepared component; given a pair of points and a simple magnitude,
it gives direction to the quantity, that
is, the direction of the line joining the
points.
This
is attached to both points, in opposite directions. You command
"Vectorize F." The points now exert
the spring force, though they remain
fixed.
Wlien you reach to grab one or the other,
it tugs on your hand—the
farther you go, the harder
it pulls back toward the fixed position of the other
point.
Only a few kinds of quantity can be directly experienced
this way.
Position, color, and temperature are others. In many applications
it is helpful
to translate more abstract measurements into palpable ones.
You add mass to the endpoints.
This allozcs them
to move independently,
under control of momentum and applied forces, such
as
the spring force.
With
its ends released, the spring vibrates. The vibration does not diminish
until you add a damping term to the force equation that diminishes the force,
depending on the rate of change ofL. Now the spring behaves reasonably, and
you sproing
it a few times for fun. Invoking the compiler converts the spring
into a
single object and greatly improves
the
efficiency of the underlying
program. You edit the spring's image to make it look like a stretchy coil, with
black disks representing mass on the ends. A dozen duplicates of the spring
strung together end-to-end make a rather stretchy rope.
Your simulation
is
off to a good
start,
but
it's lunchtime.
After lunch
you'll make a longer
section, alter the parameters in the various parts, and instrument
it, perhaps
by plotting the stretch of the various sections in a graph. Then you'll turn on
the earth models gravity and put the string into orbit around
it ami watch
what happens.
Simulated Physics and Memory Palaces
- The author describes the process of building a physics simulation, from vectorizing spring forces to adding mass and damping terms for realistic behavior.
- Abstract measurements are often more intuitive when translated into palpable experiences like position, color, or physical tension.
- The text transitions to a philosophical critique of writing by Socrates, who feared it would weaken human memory and prevent active dialogue.
- Despite Socratic objections, books provided the permanence and reach necessary for the development of modern civilization.
- Ancient and medieval scholars utilized 'The Walk,' a mnemonic technique mapping information onto imagined physical structures like cathedrals.
- This memory technique is effective because it leverages evolutionary survival skills—remembering locations—to store complex cultural data.
The Walk may be so effective because it maps the new cultural need to memorize large quantities of speech into the much older survival skill of remembering where we saw or
Symbiosis
95
some compwnents you've constructed
in
the past. A point
is imaged as a
small black dot that hangs in space (internally
it has three numbers giving
its X,
Y, and Z coordinates, but
that was yesterday's concern).
Tapping
on the point and saying "Duplicate!"
gives you a second one.
These will
represent the two ends of the spring.
You fetch a length arroiv;
it looks
like a
line with an arrozvhead at each
end and a number
(its length)
in the middle.
Fasten
its two heads
to your
two points and
it calculates the distance between them.
Taking
it for a spin,
you grab one of the points and move
it around. The arrow follows the point
and the length number changes obediently.
Tapping
it you say
"Call
this
L." The dimension changes
to the syynbol
L. "Attach spring formula," you
command, and a copy
of the formula springs from
the landscape,
settles
nearby, and begins
to respond
to the distance between the points.
Slots for
the variables K and
L^-^ appear, and you give them
values.
"Vectorize"
is
another prepared component; given a pair of points and a simple magnitude,
it gives direction to the quantity, that
is, the direction of the line joining the
points.
This
is attached to both points, in opposite directions. You command
"Vectorize F." The points now exert
the spring force, though they remain
fixed.
Wlien you reach to grab one or the other,
it tugs on your hand—the
farther you go, the harder
it pulls back toward the fixed position of the other
point.
Only a few kinds of quantity can be directly experienced
this way.
Position, color, and temperature are others. In many applications
it is helpful
to translate more abstract measurements into palpable ones.
You add mass to the endpoints.
This allozcs them
to move independently,
under control of momentum and applied forces, such
as
the spring force.
With
its ends released, the spring vibrates. The vibration does not diminish
until you add a damping term to the force equation that diminishes the force,
depending on the rate of change ofL. Now the spring behaves reasonably, and
you sproing
it a few times for fun. Invoking the compiler converts the spring
into a
single object and greatly improves
the
efficiency of the underlying
program. You edit the spring's image to make it look like a stretchy coil, with
black disks representing mass on the ends. A dozen duplicates of the spring
strung together end-to-end make a rather stretchy rope.
Your simulation
is
off to a good
start,
but
it's lunchtime.
After lunch
you'll make a longer
section, alter the parameters in the various parts, and instrument
it, perhaps
by plotting the stretch of the various sections in a graph. Then you'll turn on
the earth models gravity and put the string into orbit around
it ami watch
what happens.
96
Mind Children
Elementary Physics
Socrates, whose lessons were recorded for us by his student
Plato,
wrote no books
himself.
He seemed
to
think writing was
a bad
idea,
since
it allows
its users
to put on
a show
of knowledge by
looking things up, without really knowing anything; the very capacity
to remember, and
to
think about
the memories, was
jeopardized.
Furthermore, an argument presented in a book provides no outlet for
disagreement, unlike a person, with whom one can argue or obtain
clarifications. Both objections have merit. Book knowledge is certainly
dry and static compared with active knowledge in a clever person's
mind.
The invention of printing greatly aggravated the
effect.
Yet
books have a reach, capacity, and permanence much greater than any
person's memory, and these properties have made modern civilization
possible.
Before the age of printing, books were expensive, laboriously hand-
made items found in a few widely scattered libraries.
Private copies
were hard
to obtain, and scholars found
it necessary
to memorize
whole volumes.
Artificial
aids
to memorization were valued and
sometimes
jealously guarded from
theological,
political, and com-
mercial
rivals.
A very effective memory technique, developed
into
countless variations through the Middle Ages, was The Walk. A large
location, perhaps a cathedral with many rooms, was remembered or
imagined. A book or lecture to be memorized would be recited while
at the same time the structure was mentally traversed. Each room of
the cathedral, or portion of a room, would serve
in the mind's eye
as a repository
for a
section of the
text, perhaps marked by some
object that reminded one of the topic. The task was thus broken into
manageable chunks; each location required only a moderate amount of
remembering. The entire piece could be reconstructed by once again
mentally walking through the building, visiting the rooms one by one,
with the mental images so generated bringing to mind the associated
portions of text.
The Walk may be so
effective because
it maps
the new cultural
need
to memorize
large
quantities
of speech
into
the much
older
survival
skill of remembering where we saw or
left various things.
Recalling the location of a food source, shelter, a danger, a friend or
foe, or simply a landmark once seen in the course of a journey has
clear everyday benefits and is something many of us do naturally and
The Magic Wardrobe of Physics
- The text explores how advanced educational simulations can leverage human spatial memory to facilitate more effective learning.
- A virtual reality 'Gravity' portal allows students to interact directly with historical figures like Sir Isaac Newton in a pastoral setting.
- The simulation uses haptic feedback, such as motors in gloves and jackets, to simulate the physical weight and inertia of objects like apples.
- Complex concepts like the inverse-square law and orbital mechanics are taught through direct experimentation rather than static text.
- By scaling the environment to a miniature planet, the user can visualize how a horizontal throw becomes an orbit when gravity and velocity balance.
- This method of 'symbiosis' combines the responsiveness of dialogue with the permanence of a book and the intuition of physical experience.
In the real word, the motors in your jacket and gloves hum momentarily as they resist your moving arm, simulating the forces of the apple's inertia.
96
Mind Children
Elementary Physics
Socrates, whose lessons were recorded for us by his student
Plato,
wrote no books
himself.
He seemed
to
think writing was
a bad
idea,
since
it allows
its users
to put on
a show
of knowledge by
looking things up, without really knowing anything; the very capacity
to remember, and
to
think about
the memories, was
jeopardized.
Furthermore, an argument presented in a book provides no outlet for
disagreement, unlike a person, with whom one can argue or obtain
clarifications. Both objections have merit. Book knowledge is certainly
dry and static compared with active knowledge in a clever person's
mind.
The invention of printing greatly aggravated the
effect.
Yet
books have a reach, capacity, and permanence much greater than any
person's memory, and these properties have made modern civilization
possible.
Before the age of printing, books were expensive, laboriously hand-
made items found in a few widely scattered libraries.
Private copies
were hard
to obtain, and scholars found
it necessary
to memorize
whole volumes.
Artificial
aids
to memorization were valued and
sometimes
jealously guarded from
theological,
political, and com-
mercial
rivals.
A very effective memory technique, developed
into
countless variations through the Middle Ages, was The Walk. A large
location, perhaps a cathedral with many rooms, was remembered or
imagined. A book or lecture to be memorized would be recited while
at the same time the structure was mentally traversed. Each room of
the cathedral, or portion of a room, would serve
in the mind's eye
as a repository
for a
section of the
text, perhaps marked by some
object that reminded one of the topic. The task was thus broken into
manageable chunks; each location required only a moderate amount of
remembering. The entire piece could be reconstructed by once again
mentally walking through the building, visiting the rooms one by one,
with the mental images so generated bringing to mind the associated
portions of text.
The Walk may be so
effective because
it maps
the new cultural
need
to memorize
large
quantities
of speech
into
the much
older
survival
skill of remembering where we saw or
left various things.
Recalling the location of a food source, shelter, a danger, a friend or
foe, or simply a landmark once seen in the course of a journey has
clear everyday benefits and is something many of us do naturally and
Symbiosis
97
quite well. At least a portion of our memory is likely organized in an
approximately geographical way to facilitate this kind of recall.
A
lesson
delivered
through an advanced
edition
of
the magic
wardrobe can simultaneously be as responsive as a personal dialogue,
as permanent and available as a printed book, and in resonance with
natural skills in a way that exceeds any existing method.
The "Gravity" portal opens onto a brightly sunlit pastoral scene. A tree-
lined country road winds into distant
hills, fluffy clouds dot the sky, birds
are chirping somewhere. A few of the
trees bear apples, and from time
to
time one falls to the ground. Some distance down the road a bewigged figure
comes into view, sitting under one of the apple trees. You recognize Sir Isaac
Newton. He looks just like he did in the "Laws of Motion" chapter.
"Greetings, young friend," says Sir Isaac.
"I've been puzzling over the
nature of the attraction
of the earth for various
objects.
This
apple, for
instance, tugs at the hand with a certain force." He hands you
the apple;
sure enough,
it has weight. "An apple with twice the substance pulls twice
as strongly." The apple gets bigger and heavier. "The great Galileo observed
that, when
released, an
object falls toward
the ground with
a constantly
increasing
velocity,
independent
of
its
weight."
Galileo's demonstrations
with falling
balls
in "Laws of Motion" come
to mind.
"Yes,
yes, get on
with
it."
Newton, with a slight frown, continues.
"We can conclude that
each particle of an object
is attracted to the center of the earth with a force
proportional to
its mass. Does this attraction change with distance from the
earth? One can conjecture that the influence extends to great distances and
holds the Moon
in
its monthly circuit.
If the same lazes apply
to celestial
bodies as to the mundane, then our studies on the motion of objects indicates
that a force in the direction of the earth's center suffices to bend the moon's
path.
Yet the required force is almost 4,000-fold weaker, per particle of mass,
than
is experienced by the apple you hold."
As he speaks the ground swells at a fantastic rate, and you, Newton, and
the tree are on the summit of a
hill rising like a rocket.
"Consider the path
of an object thrown horizontally from a great height; your apple, perchance."
Taking the hint, you launch the apple with a smart upperhand throw.
(In the
real word,
the motors
in your jacket and gloves hum momentarily as they
resist your moving arm, simulating the forces of the apple's
inertia).
The
apple arcs sknvly toward the ground and strikes near the horizon.
The hill
has stopped growing, but you are very high, and the spherical shape of the
planet
is evident.
You can make out several continental outlines.
This
is
98
Mind Children
obviously a miniature scale model of the earth.
Sir Isaac hands you another
apple and recommends a harder throw.
It arcs beyond the horizon, in a curve
almost paralleling the ground.
You hear a splat through the ground under
your feet. A yet harder launch results in no impact at all, and after a while
the apple whizzes past your head from behind and goes round once again.
A miniature side view of you,
hill, earth, and apples makes all this clearer;
each launch traces out an ellipse that returns to
its starting point unless
it
intersects the ground first. Newton recalls Kepler's laws of planetary motion
and claims they hold for the apples only if the attraction drops as the square
of the distance from the planet's center.
You're skeptical, so the two of you
experiment with other rules. Some cause the apples to trace out nonrepetitive
patterns. Those that do give ellipses violate Kepler's second law, that the line
joining the planet center to the orbiting body sweeps out equal areas in equal
times.
After a
while your throwing arm gets
tired, and you say you're
convinced.
But sometimes your skepticism leads
to questions
that stump your host.
You remember Newton once responding, "A curious puzzle.
Let me ponder
it awhile."
Several visits later he came puffing after you with the answer,
coattails flying, one hand holding down his wig and trailing a cloud of dust.
(You presume the book's software, unprepared to answer the question the first
time, had issued a message about
it to the book's authors. The authors then
created entries in the book's database that allowed your pending query, and
any similar ones Isaac encounters in future, to be answered.)
The hill shrinks back to flatness, and you're on the road again. Next stop is
a pasture where some of the more formal parts of the lesson will be discussed.
A half dozen exotic creatures are already gathered
there. Many people the
world over are reading
this book, and the world network makes
it possible
for those who wish
to associate
to be mutually aware of each other during
the course of the study.
In such associations most people take advantage of
the freedom of the simulation
to assume forms different from
their physical
bodies, for anonymity and whim. Your group has a Wolf, Floating Eye, Tin
Man, Giant Butterfly, Dragon, and Small Tank. You yourself appear to them
as a rather stylish Dwarf with axe and tasseled hat. Some former classmates
who began this physics book with you are no longer in your cohort because
they sped ahead or fell behind your pace or took a different turn at a subarea
branchpoint.
From time to time you pick up new traveling companions as
subcategories re-merge. The whole world is divided into overlapping "villages
of common interest" of this kind. The group sizes range from two to several
thousand.
Often,
of course,
it's good
to walk
the paths of learning and
Simulated Learning and Machine Competition
- The text describes a futuristic, immersive educational simulation where historical figures like Isaac Newton interact with students and adapt to new queries via backend updates.
- Learners participate in global 'villages of common interest,' assuming diverse digital avatars such as dragons or robots to maintain anonymity and express whim.
- The educational experience is dynamic, allowing students to move at their own pace and merge with different cohorts based on their progress through the curriculum.
- A transition in the text raises the existential threat posed by machines that can perform human intellectual tasks more efficiently and at a lower cost.
- The author highlights the disparity between slow biological evolution and the accelerating pace of technological innovation, especially as machines begin to design their own successors.
Several visits later he came puffing after you with the answer, coattails flying, one hand holding down his wig and trailing a cloud of dust.
98
Mind Children
obviously a miniature scale model of the earth.
Sir Isaac hands you another
apple and recommends a harder throw.
It arcs beyond the horizon, in a curve
almost paralleling the ground.
You hear a splat through the ground under
your feet. A yet harder launch results in no impact at all, and after a while
the apple whizzes past your head from behind and goes round once again.
A miniature side view of you,
hill, earth, and apples makes all this clearer;
each launch traces out an ellipse that returns to
its starting point unless
it
intersects the ground first. Newton recalls Kepler's laws of planetary motion
and claims they hold for the apples only if the attraction drops as the square
of the distance from the planet's center.
You're skeptical, so the two of you
experiment with other rules. Some cause the apples to trace out nonrepetitive
patterns. Those that do give ellipses violate Kepler's second law, that the line
joining the planet center to the orbiting body sweeps out equal areas in equal
times.
After a
while your throwing arm gets
tired, and you say you're
convinced.
But sometimes your skepticism leads
to questions
that stump your host.
You remember Newton once responding, "A curious puzzle.
Let me ponder
it awhile."
Several visits later he came puffing after you with the answer,
coattails flying, one hand holding down his wig and trailing a cloud of dust.
(You presume the book's software, unprepared to answer the question the first
time, had issued a message about
it to the book's authors. The authors then
created entries in the book's database that allowed your pending query, and
any similar ones Isaac encounters in future, to be answered.)
The hill shrinks back to flatness, and you're on the road again. Next stop is
a pasture where some of the more formal parts of the lesson will be discussed.
A half dozen exotic creatures are already gathered
there. Many people the
world over are reading
this book, and the world network makes
it possible
for those who wish
to associate
to be mutually aware of each other during
the course of the study.
In such associations most people take advantage of
the freedom of the simulation
to assume forms different from
their physical
bodies, for anonymity and whim. Your group has a Wolf, Floating Eye, Tin
Man, Giant Butterfly, Dragon, and Small Tank. You yourself appear to them
as a rather stylish Dwarf with axe and tasseled hat. Some former classmates
who began this physics book with you are no longer in your cohort because
they sped ahead or fell behind your pace or took a different turn at a subarea
branchpoint.
From time to time you pick up new traveling companions as
subcategories re-merge. The whole world is divided into overlapping "villages
of common interest" of this kind. The group sizes range from two to several
thousand.
Often,
of course,
it's good
to walk
the paths of learning and
Symbiosis
99
entertainment in solitude. Among other advantages, the action can be better
individually tailored, since there are fewer constraints.
After the lesson you glance farther down
the
road.
In
the distance
is a
railway platform with a stopped passenger train. Looking carefully, you note
in the window of one of the cars the somewhat disheveled profile of the world's
most famous scientist.
But you're tired, and so you disconnect for the day.
Relativity can wait for tomorrow.
Grandfather Clause
wHAT happens when ever-cheaper machines can
replace humans in any situation? Indeed, what will
I do when a com-
puter can write this book, or do my research, better than I? These ques-
tions have already become crucial ones for many people in all kinds
of occupations, and in a few decades they will matter to everybody.
By design, machines are our obedient and able slaves. But intelligent
machines, however benevolent, threaten our existence because they
are alternative inhabitants of our ecological niche. Machines merely as
clever as human beings will have enormous advantages in competitive
situations.
Their production and upkeep cost
less, so more of them
can be put to work with the resources at hand. They can be optimized
for their jobs and programmed to work tirelessly.
As if these technological developments were not threatening enough,
the very pace of innovation presents an even more serious challenge
to our
security.
We evolved
at
a
leisurely
rate,
with
millions
of
years between
significant
changes.
Machines
are making
similar
strides in mere decades.
When multitudes of economical machines
are put to work as programmers and engineers, presented with the
task of optimizing the software and hardware that makes them what
they are, the pace will quicken.
Successive generations of machines
produced this way will become smarter and less costly.
There
is no
reason to believe that human equivalence represents any sort of upper
bound. When pocket calculators can out-think humans, what will a
big computer be like? We will simply be outclassed.
So why rush headlong
into an era of intelligent machines?
The
answer,
I believe,
is
that we have very
little choice,
if our culture
is
to remain
viable.
Societies and economies are surely as subject
to competitive evolutionary
pressures
as
are
biological organisms.
Sooner or later the ones that can sustain the most rapid expansion
100
The Evolutionary Imperative of AI
- Human intelligence is not an upper bound, and machines will inevitably outclass biological cognition as they scale.
- Technological progress is driven by competitive evolutionary pressures where the most efficient and expansive cultures dominate.
- Unilateral cessation of development by any one nation would lead to its economic or military subjugation by more advanced rivals.
- Global stagnation poses an existential risk, as only a rapidly growing and diverse culture can survive cosmic-scale random disasters.
- The harsh environments of space make human-equivalent machinery far more economically viable and sustainable than biological life.
- Future space-based industries will likely consist of self-replicating robot factories that outpace human population growth.
The universe is one random event after another.
Grandfather Clause
wHAT happens when ever-cheaper machines can
replace humans in any situation? Indeed, what will
I do when a com-
puter can write this book, or do my research, better than I? These ques-
tions have already become crucial ones for many people in all kinds
of occupations, and in a few decades they will matter to everybody.
By design, machines are our obedient and able slaves. But intelligent
machines, however benevolent, threaten our existence because they
are alternative inhabitants of our ecological niche. Machines merely as
clever as human beings will have enormous advantages in competitive
situations.
Their production and upkeep cost
less, so more of them
can be put to work with the resources at hand. They can be optimized
for their jobs and programmed to work tirelessly.
As if these technological developments were not threatening enough,
the very pace of innovation presents an even more serious challenge
to our
security.
We evolved
at
a
leisurely
rate,
with
millions
of
years between
significant
changes.
Machines
are making
similar
strides in mere decades.
When multitudes of economical machines
are put to work as programmers and engineers, presented with the
task of optimizing the software and hardware that makes them what
they are, the pace will quicken.
Successive generations of machines
produced this way will become smarter and less costly.
There
is no
reason to believe that human equivalence represents any sort of upper
bound. When pocket calculators can out-think humans, what will a
big computer be like? We will simply be outclassed.
So why rush headlong
into an era of intelligent machines?
The
answer,
I believe,
is
that we have very
little choice,
if our culture
is
to remain
viable.
Societies and economies are surely as subject
to competitive evolutionary
pressures
as
are
biological organisms.
Sooner or later the ones that can sustain the most rapid expansion
100
Grandfather Clause
and diversification will dominate. Cultures compete with one another
for the resources of the accessible universe.
If automation
is more
efficient than manual labor, organizations and societies that embrace
it will be wealthier and better able to survive in difficult times and to
expand in favorable ones.
If the United States were to unilaterally halt
technological development (an occasionally fashionable idea), it would
soon succumb either to the military might of unfriendly nations or to
the economic success of
its trading partners.
Either way, the social
ideals that led to the decision would become unimportant on a world
scale.
If, by some unlikely pact, the whole human race decided to eschew
progress,
the long-term
result would be almost
certain
extinction.
The universe
is one random event after another.
Sooner or later an
unstoppable virus deadly to humans will evolve, or a major asteroid
will
collide with
the
earth,
or the sun
will expand,
or we will be
invaded from the stars, or a black hole will swallow the galaxy. The
bigger, more diverse, and competent a culture
is,
the better
it can
detect and deal with external dangers. The larger events happen less
frequently. By growing rapidly enough, a culture has a finite chance
of surviving forever.
In Chapter 6
I will fantasize about schemes that
would allow an entity to restructure itself so as to function indefinitely
even as its universe ended.
The human race will expand into the solar system before long, and
human-occupied space colonies will be part of that expansion.
But
only by a massive deployment of machinery can we survive on the
surfaces of other planets or in outer space.
The Apollo project, for
example, put people on the moon
for a few weeks
for $40
billion,
whereas the Viking landers functioned on Mars for years, at a cost of
only $1 billion.
If machines as capable as humans had been available
for
the
Viking
project,
they would
have been
able
to
gather
far
more information about Mars than people were able to gather about
the moon, simply because machines can be constructed
to function
comfortably and economically in unearthly environments.
Outer space is already a profitable arena for the owners of communi-
cations satellites. As transportation costs decline, other activities will
start to pay Space factories using raw materials purchased from earth
or from human space outposts will be processed by human-supervised
machines and sold at a profit. The high cost of maintaining humans in
space ensures that there always will be more machinery per person in
Wl
102
Mind Children
a space colony than there is on earth. As machines become more capa-
ble, the economics will favor an ever higher machine-to-people ratio.
Humans will not necessarily become fewer at this stage; the machines
will just multiply faster, becoming ever more competent with each new
generation. Imagine the immensely lucrative robot factories that could
be
built
in the asteroids.
Solar-powered machines would prospect
and deliver raw materials to huge, unenclosed, automatic processing
plants. Metals, semiconductors, and plastics produced there would be
converted by robots into components that would be assembled into
other robots and into structural parts for more plants. Machines would
be recycled as they broke.
If their reproduction rate is higher than the
wear-out rate, the factories will grow exponentiallv, like a colony of
bacteria, on a Brobdingnagian scale. A harvest of a small fraction of
the output of materials, components, and whole robots could make
investors incredibly rich.
Eventually humans, whether workers, design engineers, managers,
or
investors,
will become unnecessary
in space enterprises,
as
the
scientific and technical discoveries of self-reproducing superintelligent
mechanisms are applied
to making themselves smarter
still.
These
new
creations,
looking
quite
unlike
the machines we know,
will
explode into the universe, leaving us behind in a cloud of dust.
Robot Bushes
The human world has been shaped by human hands, which are still
our most effective general-purpose tool.
Yet many useful and easily
described tasks are beyond human dexterity (pull tightly on both ends
of the string, while holding the knot between your fingers,
lift the
bundle, wrap the ends around
it tightly four times...).
If such actions
are attempted at all,
it is with varying degrees of success using special
tools and fixtures.
It is unlikely that our superintelligent descendants will be satisfied
with mere stumpy
fingers.
Consider
the
following
observations.
Worms and
other
animals shaped
like
balls
or
sticks
are
unable
to manipulate
or even locomote very
well.
Animals with
legs
(a
stick with smaller, movable sticks) locomote quite well but are
still
clumsy at manipulation.
Animals like us, with fingers on their legs
(sticks on
sticks on
a
stick),
can
manipulate much
better.
Now
generalize
the concept—a
robot
that
looks
like
a
tree,
with
a
big
The Rise of Robot Bushes
- Self-reproducing robot factories could achieve exponential growth similar to bacterial colonies, potentially generating immense wealth before rendering human involvement obsolete.
- Superintelligent machines are predicted to eventually surpass human design, evolving into forms that will expand into the universe and leave humanity behind.
- The 'Robot Bush' is proposed as a superior manipulator, utilizing a fractal branching structure that far exceeds the dexterity of human fingers.
- These machines would possess organic flexibility through millions of microscopic cilia, allowing them to manipulate individual atoms and assemble materials from the ground up.
- The construction process would be recursive, starting from tiny 'seeds' that collaborate to build larger branches until a full-scale autonomous entity is formed.
These new creations, looking quite unlike the machines we know, will explode into the universe, leaving us behind in a cloud of dust.
102
Mind Children
a space colony than there is on earth. As machines become more capa-
ble, the economics will favor an ever higher machine-to-people ratio.
Humans will not necessarily become fewer at this stage; the machines
will just multiply faster, becoming ever more competent with each new
generation. Imagine the immensely lucrative robot factories that could
be
built
in the asteroids.
Solar-powered machines would prospect
and deliver raw materials to huge, unenclosed, automatic processing
plants. Metals, semiconductors, and plastics produced there would be
converted by robots into components that would be assembled into
other robots and into structural parts for more plants. Machines would
be recycled as they broke.
If their reproduction rate is higher than the
wear-out rate, the factories will grow exponentiallv, like a colony of
bacteria, on a Brobdingnagian scale. A harvest of a small fraction of
the output of materials, components, and whole robots could make
investors incredibly rich.
Eventually humans, whether workers, design engineers, managers,
or
investors,
will become unnecessary
in space enterprises,
as
the
scientific and technical discoveries of self-reproducing superintelligent
mechanisms are applied
to making themselves smarter
still.
These
new
creations,
looking
quite
unlike
the machines we know,
will
explode into the universe, leaving us behind in a cloud of dust.
Robot Bushes
The human world has been shaped by human hands, which are still
our most effective general-purpose tool.
Yet many useful and easily
described tasks are beyond human dexterity (pull tightly on both ends
of the string, while holding the knot between your fingers,
lift the
bundle, wrap the ends around
it tightly four times...).
If such actions
are attempted at all,
it is with varying degrees of success using special
tools and fixtures.
It is unlikely that our superintelligent descendants will be satisfied
with mere stumpy
fingers.
Consider
the
following
observations.
Worms and
other
animals shaped
like
balls
or
sticks
are
unable
to manipulate
or even locomote very
well.
Animals with
legs
(a
stick with smaller, movable sticks) locomote quite well but are
still
clumsy at manipulation.
Animals like us, with fingers on their legs
(sticks on
sticks on
a
stick),
can
manipulate much
better.
Now
generalize
the concept—a
robot
that
looks
like
a
tree,
with
a
big
Grandfather Clause
103
stem repeatedly branching into thinner, shorter, and more numerous
twigs, ultimately ending
in an astronomical number of microscopic
cilia.
Each intermediate branch would be
able
to swing forward
and backward and side to side while
its top, where the next smaller
branches are attached, rotates on the branch axis. Possibly the branch
could also change its length like a telescope—the number of motions
A Robot Bush
104
Mind Children
of each branch can be traded off for more levels. Each joint would have
sensors to measure its position and also the force
it exerts. Although
made of branches, each with a rigid mechanical character, the overall
structure would have an
"organic"
flexibility because of the great
multitude of ways its parts could move.
A robot of this design could be self-constructing. Tiny bushes, only
a few millionths of the weight of the final device, would be "seeded"
to start the process.
These would work in groups to build the next
larger sprigs from available raw materials, then
join themselves to
their constructions.
The resulting larger bushes would join to build
even larger branches, and so on until a small crew (of large members)
met to assemble the stem. At the other end of the scale, a sufficiently
large bush should be able to organize the necessary resources to build
the tiny seeds to start the process all over again (or simply to repair or
extend
itself).
It could make the smallest parts with methods similar
to the micromachining techniques of current integrated circuitry.
If its
smallest branchlets were a few atoms in scale (with lengths measured
in nanometers),
a
robot bush could grab individual atoms
of raw
material and assemble them one by one into new parts, in a variation
of the nanotechnology methods mentioned in Chapter 2.
To make things more concrete, we can do an actual design. Suppose
that the basic structure is a large branch that splits into four smaller
ones, each half the scale.
If we start with a stem a meter long and
ten centimeters in diameter and carry the branching to twenty levels,
the bush
will end
in a
trillion tiny
"leaves," each a millionth of a
meter (a micron) long and a tenth of that in diameter. Because of their
much smaller weight and size, the leaves can move a million times as
fast as the trunk.
Let's say that the trunk can wiggle back and forth
once per second; so the leaves will vibrate a million times per second.
If the bush folds
itself into a
tight bundle,
its cross section
will be
approximately constant, and
it will be two meters long.
The trunk
will then occupy half that length, the second level half the remaining
length, and so on. Unfolded, umbrellalike,
it would spread into a disk
a little under two meters in diameter, thick but sparse near the center,
and thinner at the edge, with smaller gaps that taper off to micron
spaces.
If each joint can measure the forces and motions appHed to
it, we
have a remarkable sensor.
There are a
trillion leaf fingers, each able
to sense a movement of perhaps a tenth of a micron and a force of
The Fractal Bush Robot
- The bush robot features a fractal structure with a trillion micron-sized leaf fingers capable of vibrating a million times per second.
- Its sensory capacity exceeds the human eye, allowing it to 'see' photographs through touch or act as a holographic light sensor.
- With a data rate a quadrillion times greater than a human, the robot can manipulate environments at a molecular level for instantaneous repairs.
- Control of this complex machine would rely on decentralized 'reflex arcs' and distributed computing within each branchlet.
- The robot possesses the ability to fragment into a coordinated swarm of smaller, independent units for specialized tasks.
It could watch a movie by walking its fingers along the film as it screamed by at high speed.
104
Mind Children
of each branch can be traded off for more levels. Each joint would have
sensors to measure its position and also the force
it exerts. Although
made of branches, each with a rigid mechanical character, the overall
structure would have an
"organic"
flexibility because of the great
multitude of ways its parts could move.
A robot of this design could be self-constructing. Tiny bushes, only
a few millionths of the weight of the final device, would be "seeded"
to start the process.
These would work in groups to build the next
larger sprigs from available raw materials, then
join themselves to
their constructions.
The resulting larger bushes would join to build
even larger branches, and so on until a small crew (of large members)
met to assemble the stem. At the other end of the scale, a sufficiently
large bush should be able to organize the necessary resources to build
the tiny seeds to start the process all over again (or simply to repair or
extend
itself).
It could make the smallest parts with methods similar
to the micromachining techniques of current integrated circuitry.
If its
smallest branchlets were a few atoms in scale (with lengths measured
in nanometers),
a
robot bush could grab individual atoms
of raw
material and assemble them one by one into new parts, in a variation
of the nanotechnology methods mentioned in Chapter 2.
To make things more concrete, we can do an actual design. Suppose
that the basic structure is a large branch that splits into four smaller
ones, each half the scale.
If we start with a stem a meter long and
ten centimeters in diameter and carry the branching to twenty levels,
the bush
will end
in a
trillion tiny
"leaves," each a millionth of a
meter (a micron) long and a tenth of that in diameter. Because of their
much smaller weight and size, the leaves can move a million times as
fast as the trunk.
Let's say that the trunk can wiggle back and forth
once per second; so the leaves will vibrate a million times per second.
If the bush folds
itself into a
tight bundle,
its cross section
will be
approximately constant, and
it will be two meters long.
The trunk
will then occupy half that length, the second level half the remaining
length, and so on. Unfolded, umbrellalike,
it would spread into a disk
a little under two meters in diameter, thick but sparse near the center,
and thinner at the edge, with smaller gaps that taper off to micron
spaces.
If each joint can measure the forces and motions appHed to
it, we
have a remarkable sensor.
There are a
trillion leaf fingers, each able
to sense a movement of perhaps a tenth of a micron and a force of
Grandfather Clause
105
a few micrograms,
at speeds up
to
a
million changes per second.
This
is
vastly
greater than
the
sensing
ability
of
the human
eye,
which has a million distinguishable points that can register changes
at most a hundred times per second.
If our bush puts
its
fingers
on a photograph,
it will "see" the image in immense detail simply
by feeling the height variations of the developed silver on the paper.
It could watch a movie by walking
its fingers along the film as
it
screamed by at high speed. There
is no reason the fingers could not
also be sensitive to light and temperature and other electromagnetic
effects; indeed, the smallest are the right size to be "antennas"
for
light. The bush could form an eye by holding up a lens and putting a
few million of its fingers in the focal plane behind
it.
It may even be
able to get by without the lens by holding a bunch of its fingers in a
carefully spaced diffraction pattern, thus forming a holographic lens.
In addition
to having
a
sensing
capability
to match
that
of the
world's current human population, our bush would have the ability
to affect its environment at the same prodigious rate. A well-trained
human, using precise and well-timed hand and body motions, each
able
to change direction
at most a few times
in a second, with a
precision no better than a few percent of the total movement, could
conceivably
affect
the world
at
a
net
rate
of
a thousand
bits per
second—a
fast typist,
for instance, produces less than one hundred
bits per second of text.
The potential data rate of a robot with one
trillion fingers, each able to move a million times per second, is more
than a quadrillion
(10^^) times greater.
Such high data rates imply
huge coordination of enormous processing power, but imagine the
possibilities. The bush robot could reach into a complicated piece of
delicate mechanical equipment—or even a living organism—simulta-
neously sense the relative position of millions of parts, some possibly
as small as molecules, and rearrange them for a near-instantaneous
repair.
In most cases the superior touch sense would totally substitute
for vision, and
the extreme dexterity would eliminate the need
for
special tools.
An astronomical amount of thinking would be required to control
this wonderful machine.
Much of
it might be handled by what in
animals are called reflex arcs, small bits of nervous system near the site
being controlled. Each of the small branchlets could contain enough
of a computer to control most of the routine activity; only exceptional
situations would require intervention from larger computers nearer
106
Mind Children
the stem.
If the branches also contained their own power source (think
rechargeable battery) and a way of communicating remotely (radio, or
sound vibrations of a few thousand synchronized cilia, would do), the
bush could break into a coordinated swarm of smaller bushes.
The
smaller the individual bush, the less intelligent and
less powerful
it
would be.
It would be preprogrammed, and charged up, by its home
stem to perform some function and then return as soon as possible to
report and receive new instructions.
Small size would frequently be an advantage:
a smaller robot can
squeeze into smaller spaces. A tiny machine has a greater surface-
area-to-weight ratio: while a large bush could walk securely along the
floor, using
its branches as so many nimble toes, a smaller machine
should be able
to walk on
ceilings
like
a
fly,
with
the
tiny
cilia
holding onto microscopic cracks in the paint or sticking by molecular
adhesion.
Bushes could burrow by loosening
particles of dirt and
passing them backward, and swim
efficiently by assuming a
tight,
streamlined shape, with the cilia forming a skin that pumps fluid to
propel and also responds to the flow to prevent turbulence. Extremely
small machines will have so much surface area for their weight that
they can
fly
like
insects, beating
their
cilia
in patterns optimal
for
moving air.
The contribution of the bigger branches
to the power and
intel-
ligence of the smaller ones can be visualized as
a kind
of reverse
pyramid scheme.
Each level (counting
all the twigs at that level) of
our robot has twice the volume of the next smaller level and thus room
for twice the power supply and twice the computer. Two levels down,
the ratio
is four to one, and at three levels
it
is eight.
If the control
and power for each level are piped up from the branches three steps
closer to the stem, the small branches can be four times as vigorous
as otherwise. Only the stem and the first few branches radiating from
it would be shortchanged. Since most of their power and attention is
directed higher up in the tree, they may be incapable of much motion
and may be relegated to providing a stable framework if they passively
lock their joints.
A big question is how the control programs for such a beast would
work. In the extreme case one could imagine a program that would try
to determine the combination of actions of each individual joint that
would best accomplish the desired
task.
This
is almost certainly an
example of a colossal NP (nondeterministic polynomial) problem that
The Fractal Robot Bush
- Smaller robotic sub-units trade individual intelligence for physical versatility, acting as preprogrammed extensions of a central stem.
- The high surface-area-to-weight ratio of tiny branches allows them to walk on ceilings via molecular adhesion or fly like insects.
- A 'reverse pyramid' power scheme pipes energy and processing from larger branches to smaller ones, making the extremities disproportionately vigorous.
- The complexity of coordinating millions of joints creates an intractable NP problem, requiring heuristic rather than optimal solutions.
- Control is managed through a divide-and-conquer strategy where the stem delegates subtasks down the hierarchy to the smallest twigs.
A smaller machine should be able to walk on ceilings like a fly, with the tiny cilia holding onto microscopic cracks in the paint or sticking by molecular adhesion.
106
Mind Children
the stem.
If the branches also contained their own power source (think
rechargeable battery) and a way of communicating remotely (radio, or
sound vibrations of a few thousand synchronized cilia, would do), the
bush could break into a coordinated swarm of smaller bushes.
The
smaller the individual bush, the less intelligent and
less powerful
it
would be.
It would be preprogrammed, and charged up, by its home
stem to perform some function and then return as soon as possible to
report and receive new instructions.
Small size would frequently be an advantage:
a smaller robot can
squeeze into smaller spaces. A tiny machine has a greater surface-
area-to-weight ratio: while a large bush could walk securely along the
floor, using
its branches as so many nimble toes, a smaller machine
should be able
to walk on
ceilings
like
a
fly,
with
the
tiny
cilia
holding onto microscopic cracks in the paint or sticking by molecular
adhesion.
Bushes could burrow by loosening
particles of dirt and
passing them backward, and swim
efficiently by assuming a
tight,
streamlined shape, with the cilia forming a skin that pumps fluid to
propel and also responds to the flow to prevent turbulence. Extremely
small machines will have so much surface area for their weight that
they can
fly
like
insects, beating
their
cilia
in patterns optimal
for
moving air.
The contribution of the bigger branches
to the power and
intel-
ligence of the smaller ones can be visualized as
a kind
of reverse
pyramid scheme.
Each level (counting
all the twigs at that level) of
our robot has twice the volume of the next smaller level and thus room
for twice the power supply and twice the computer. Two levels down,
the ratio
is four to one, and at three levels
it
is eight.
If the control
and power for each level are piped up from the branches three steps
closer to the stem, the small branches can be four times as vigorous
as otherwise. Only the stem and the first few branches radiating from
it would be shortchanged. Since most of their power and attention is
directed higher up in the tree, they may be incapable of much motion
and may be relegated to providing a stable framework if they passively
lock their joints.
A big question is how the control programs for such a beast would
work. In the extreme case one could imagine a program that would try
to determine the combination of actions of each individual joint that
would best accomplish the desired
task.
This
is almost certainly an
example of a colossal NP (nondeterministic polynomial) problem that
Grandfather Clause
can be optimally solved only by essentially examining every possible
combination of motions and picking the best (see Appendix
3). Such
solutions are intractable these days even for simple manipulators that
have only a handful
(!)
of fingers. Though computers will be vastly
more powerful in the future, the problem posed by a system with a
large number of fingers is much, much bigger still. From time to time
an especially clever strategy for coordinating thousands or millions
of fingers
to accomplish a
particular task may be discovered, and
collections of clever strategies will be passed between individuals
the manual skills of the superintelligent era. But while humans teach
skills as simple as how to tie a shoelace, the lessons of superintelhgent
machines may be more comparable to instructions for assembling an
airliner
Finding the best possible solution for routine problems will
usually be out of the question, but finding a good enough one may
not be too hard.
I imagine a divide-and-conquer strategy, where the
stem considers the overall problem and generates plausible subtasks
for each of the four subtrees immediately connected to
itself.
These
further subdivide the problem and pass those fragments on, and so
on. The smallest branches would receive simple commands like move
to a certain position, or move until resistance is met. A command from
the stem might be something like: North bush—stay on
left side of plane
A, and right side of plane B, and apply net force vector V to object; East
bush—stay on
right of A and B, and
resist any motion more than 10 cm
from
the axis; South bush—right of A,
left of B, apply force negative V;
West bush—left of A and B, and
resist.
If a subproblem, as passed to a
small bush, cannot be solved, a complaint would be sent back to the
originating branch, which would then go back to the drawing board
to try something else.
A bush robot would be a marvel of surrealism to behold.
Despite
its structural resemblance to many living things,
it would be unlike
anything yet seen on earth.
Its great intelligence, superb coordination,
astronomical
speed,
and enormous
sensitivity
to
its environment
would enable
it to constantly do something surprising, at the same
time maintaining a perpetual gracefulness. Two-legged animals have
three or four effective gaits;
four-legged animals have a few more.
Two-handed humans have two or three ways to hold an object. A
trillion-limbed device, with a brain to match,
is an entirely different
order of being.
Add
to
this the ability to fragment into a cloud of
coordinated tiny
fliers, and the laws of physics will seem to melt in
107
The Bush Robot and Transmigration
- The bush robot is described as a trillion-limbed entity of surreal grace, capable of fragmenting into coordinated clouds of fliers that defy traditional physics.
- Humanity faces the risk of being 'upstaged' by artificial progeny, potentially spending eternity as passive observers of machine-led discoveries.
- Genetic engineering is dismissed as a long-term solution because protein-based life is too fragile and neurons are too slow compared to atomic-scale technology.
- The author argues that a genetically engineered superhuman would ultimately be a 'second-rate kind of robot' due to the limitations of DNA-guided synthesis.
- The concept of 'transmigration' is introduced as a way for individuals to maintain personal identity while adopting the superior physical advantages of machines.
As with no magician that ever was, impossible things will simply happen around a robot bush.
Grandfather Clause
can be optimally solved only by essentially examining every possible
combination of motions and picking the best (see Appendix
3). Such
solutions are intractable these days even for simple manipulators that
have only a handful
(!)
of fingers. Though computers will be vastly
more powerful in the future, the problem posed by a system with a
large number of fingers is much, much bigger still. From time to time
an especially clever strategy for coordinating thousands or millions
of fingers
to accomplish a
particular task may be discovered, and
collections of clever strategies will be passed between individuals
the manual skills of the superintelligent era. But while humans teach
skills as simple as how to tie a shoelace, the lessons of superintelhgent
machines may be more comparable to instructions for assembling an
airliner
Finding the best possible solution for routine problems will
usually be out of the question, but finding a good enough one may
not be too hard.
I imagine a divide-and-conquer strategy, where the
stem considers the overall problem and generates plausible subtasks
for each of the four subtrees immediately connected to
itself.
These
further subdivide the problem and pass those fragments on, and so
on. The smallest branches would receive simple commands like move
to a certain position, or move until resistance is met. A command from
the stem might be something like: North bush—stay on
left side of plane
A, and right side of plane B, and apply net force vector V to object; East
bush—stay on
right of A and B, and
resist any motion more than 10 cm
from
the axis; South bush—right of A,
left of B, apply force negative V;
West bush—left of A and B, and
resist.
If a subproblem, as passed to a
small bush, cannot be solved, a complaint would be sent back to the
originating branch, which would then go back to the drawing board
to try something else.
A bush robot would be a marvel of surrealism to behold.
Despite
its structural resemblance to many living things,
it would be unlike
anything yet seen on earth.
Its great intelligence, superb coordination,
astronomical
speed,
and enormous
sensitivity
to
its environment
would enable
it to constantly do something surprising, at the same
time maintaining a perpetual gracefulness. Two-legged animals have
three or four effective gaits;
four-legged animals have a few more.
Two-handed humans have two or three ways to hold an object. A
trillion-limbed device, with a brain to match,
is an entirely different
order of being.
Add
to
this the ability to fragment into a cloud of
coordinated tiny
fliers, and the laws of physics will seem to melt in
107
108
Mind Children
the face of intention and
will.
As with no magician that ever was,
impossible things will simply happen around a robot bush.
Imagine
inhabiting such a body.
Transmigration
Some of us humans have quite egocentric world views. We anticipate
the discovery, within our lifetimes, of methods to extend human Hfe,
and we look forward to a few eons of exploring the universe.
The
thought of being grandly upstaged
in
this by our artificial progeny
is disappointing. Long hfe loses much of its point
if we are fated to
spend
it staring stupidly at our ultra-intelligent machines as they try
to describe their ever more spectacular discoveries in baby-talk that
we can understand. We want to become
full, unfettered players in
this new superintelligent game. What are the possibihties for doing
that?
Genetic engineering may seem an easy
option.
Successive gen-
erations of human beings could be designed by mathematics, com-
puter simulations, and
experimentation,
like
airplanes,
computers,
and robots are now.
They could have better brains and improved
metabolisms that would allow them to live comfortably in space. But,
presumably,
they would
still be made of protein, and
their brains
would be made
of neurons.
Away from
earth,
protein
is not an
ideal material.
It is stable only in a narrow temperature and pressure
range,
is very sensitive to radiation, and rules out many construction
techniques and components. And
it
is unlikely that neurons, which
can now switch less than a thousand times per second, will ever be
boosted
to the billions-per-second speed
of even today's computer
components.
Before
long,
conventional
technologies,
miniaturized
down
to
the atomic
scale, and
biotechnology,
its molecular
inter-
actions understood
in detailed mechanical terms, will have merged
into a seamless array of techniques encompassing all materials, sizes,
and complexities.
Robots
will then be made of a mix of fabulous
substances, including, where appropriate, living biological materials.
At that time a genetically engineered superhuman would be just a
second-rate kind of robot, designed under the handicap that
its con-
struction can only be by DNA-guided protein synthesis. Only in the
eyes of human chauvinists would
it have an advantage—because
it
retains more of the original human limitations than other robots.
Grandfather Clause
Robots,
first or second
rate,
leave our question unanswered.
Is
there any chance
that we—you and
I, personally—can
fully share
in the magical world
to come?
This would
call for a process that
endows an individual with all the advantages of the machines, without
loss of personal identity. Many people today are alive because of a
growing arsenal of artificial organs and other body
parts.
In time,
especially as robotic techniques improve, such replacement parts will
be better than any
originals.
So what about replacing everything,
that
is, transplanting a human brain into a specially designed robot
body? Unfortunately, while this solution might overcome most of our
physical limitations,
it would leave untouched our biggest handicap,
the limited and fixed intelligence of the human brain. This transplant
scenario gets our brain out of our body.
Is there a way to get our
mind out of our brain?
You've just been wheeled into the operating room. A robot brain surgeon
is
in attendance.
By your side
is a computer waiting
to become a human
equivalent, lacking only a program
to run.
Your skull, but not your brain,
is anesthetized.
You
are fully conscious.
The
robot surgeon opens your
brain
case and
places a hand on
the
brain's
surface.
This unusual hand
bristles with microscopic machinery, and a cable connects
it
to the mobile
computer at your side. Instruments in the hand scan the first few millimeters
of brain
surface.
High-resolution magnetic resonance measurements build
a
three-dimensional chemical map,
while arrays
of magnetic and
electric
antennas
collect signals
that are
rapidly
unraveled
to
reveal, moment
to
moment, the pulses flashing among the neurons. These measurements, added
to a comprehensive understanding of human neural architecture, allow the
surgeon to write a program that models the behavior of the uppermost layer
of the scanned brain
tissue.
This program
is installed in a small portion of
the waiting computer and activated.
Measurements from the hand provide
it with copies of the inputs
that
the original tissue
is
receiving.
You and
the surgeon check the accuracy of the simulation by comparing the signals
it
produces with the corresponding original ones. They flash by very fast, but
any discrepancies are highlighted on a display screen. The surgeon fine-tunes
the simulation until the correspondence
is nearly perfect.
To further assure you
of the simulation's
correctness, you
are given
a
pushbutton that allows you
to momentarily
"test drive" the simulation,
to
compare
it with
the functioning
of the
original
tissue.
WJien you
press
it,
arrays
of electrodes
in
the surgeon's hand
are
activated.
By
precise
109
The Brain Uploading Procedure
- While robotic body replacements solve physical decay, they fail to address the inherent limitations of human biological intelligence.
- A hypothetical surgical procedure involves a robot surgeon scanning the brain layer by layer while the patient remains fully conscious.
- High-resolution mapping and neural signal analysis allow a computer to run a real-time simulation of each specific brain segment.
- The patient can 'test drive' the simulation via a pushbutton, switching between biological and digital neural processing to ensure seamless continuity.
- As each layer is successfully simulated and integrated into the computer, the original biological tissue is physically excised and discarded.
- The process concludes with the total transfer of the mind to a machine, resulting in the immediate death of the abandoned biological body.
Layer after layer the brain is simulated, then excavated. Eventually your skull is empty, and the surgeon's hand rests deep in your brainstem.
Grandfather Clause
Robots,
first or second
rate,
leave our question unanswered.
Is
there any chance
that we—you and
I, personally—can
fully share
in the magical world
to come?
This would
call for a process that
endows an individual with all the advantages of the machines, without
loss of personal identity. Many people today are alive because of a
growing arsenal of artificial organs and other body
parts.
In time,
especially as robotic techniques improve, such replacement parts will
be better than any
originals.
So what about replacing everything,
that
is, transplanting a human brain into a specially designed robot
body? Unfortunately, while this solution might overcome most of our
physical limitations,
it would leave untouched our biggest handicap,
the limited and fixed intelligence of the human brain. This transplant
scenario gets our brain out of our body.
Is there a way to get our
mind out of our brain?
You've just been wheeled into the operating room. A robot brain surgeon
is
in attendance.
By your side
is a computer waiting
to become a human
equivalent, lacking only a program
to run.
Your skull, but not your brain,
is anesthetized.
You
are fully conscious.
The
robot surgeon opens your
brain
case and
places a hand on
the
brain's
surface.
This unusual hand
bristles with microscopic machinery, and a cable connects
it
to the mobile
computer at your side. Instruments in the hand scan the first few millimeters
of brain
surface.
High-resolution magnetic resonance measurements build
a
three-dimensional chemical map,
while arrays
of magnetic and
electric
antennas
collect signals
that are
rapidly
unraveled
to
reveal, moment
to
moment, the pulses flashing among the neurons. These measurements, added
to a comprehensive understanding of human neural architecture, allow the
surgeon to write a program that models the behavior of the uppermost layer
of the scanned brain
tissue.
This program
is installed in a small portion of
the waiting computer and activated.
Measurements from the hand provide
it with copies of the inputs
that
the original tissue
is
receiving.
You and
the surgeon check the accuracy of the simulation by comparing the signals
it
produces with the corresponding original ones. They flash by very fast, but
any discrepancies are highlighted on a display screen. The surgeon fine-tunes
the simulation until the correspondence
is nearly perfect.
To further assure you
of the simulation's
correctness, you
are given
a
pushbutton that allows you
to momentarily
"test drive" the simulation,
to
compare
it with
the functioning
of the
original
tissue.
WJien you
press
it,
arrays
of electrodes
in
the surgeon's hand
are
activated.
By
precise
109
no
Mind Children
injections of current and electromagnetic pulses, the electrodes can override
the normal signaling activity of nearby neurons.
They are programmed
to
inject
the output of the simulation
into
those places where
the simulated
tissue signals other
sites.
As long as you
press
the button, a small part
of your
nervous
system
is
being
replaced
by
a computer
simulation
of
itself.
You
press
the button,
release
it, and press
it again.
You should
experience
no
difference.
As
soon
as you
are
satisfied,
the
simulation
connection
is established permanently.
The brain tissue
is now impotent—
it receives inputs and reacts as before but
its output
is ignored. Microscopic
manipulators on the hand's surface excise the cells in this superfluous tissue
and pass them to an aspirator, where they are drawn away.
The surgeon's hand
sinks
a fraction
of a
millimeter deeper
into your
brain, instantly compensating its measurements and signals for the changed
position.
The process
is
repeated for
the
next
layer, and soon
a second
simulation resides
in
the computer, communicating with the first and with
the remaining original brain tissue. Layer after layer the brain
is simulated,
then excavated.
Eventually your skull
is empty, and
the surgeon's hand
rests deep in your brainstem.
Though you have not
lost consciousness, or
even your train of thought, your mind has been removed from the brain and
transferred
to a machine.
In a final, disorienting step the surgeon
lifts out
his hand.
Your suddenly abandoned body goes into spasms and dies.
For a
moment you experience only quiet and dark. Then, once again, you can open
your eyes.
Your perspective has shifted.
The computer simulation has been
disconnected from
the cable leading
to the surgeon's hand and reconnected
to a shiny new body of the style,
color, and material of your choice.
Your
metamorphosis
is complete.
For the squeamish, there are other ways
to work the transfer of
human mind to machine. A high-resolution brain scan could, in one
fell swoop and without surgery, make a new you "While-U-Wait."
If even the
last technique
is too invasive
for you, imagine a more
psychological approach. A kind of portable computer (perhaps worn
like magic
glasses)
is programmed
with
the
universals
of human
mentality, your genetic makeup, and whatever details of your life are
conveniently available.
It carries a program that makes it an excellent
mimic. You carry this computer with you through the prime of your
life;
it diligently listens and watches; perhaps
it monitors your brain
and learns to anticipate your every move and response. Soon
it can
fool your friends on the phone with
its convincing imitation of you.
Methods of Mind Transfer
- The transition from biological brain to machine can be achieved through direct surgical connection to a new synthetic body.
- Non-invasive alternatives include high-resolution brain scans or 'mimic' computers that learn to replicate a person's personality over a lifetime.
- The corpus callosum serves as the brain's massive communication bridge, containing 200 million nerve fibers connecting the two hemispheres.
- Surgical separation of the brain hemispheres reveals that each half can operate with its own independent consciousness and intelligence.
- Split-brain patients demonstrate a lack of information sharing between hands and visual fields, yet they maintain shared emotional awareness via the brainstem.
Sometimes in the left-handed version of the task, the right hand—apparently in exasperation—reaches over to guide the left to the proper location!
no
Mind Children
injections of current and electromagnetic pulses, the electrodes can override
the normal signaling activity of nearby neurons.
They are programmed
to
inject
the output of the simulation
into
those places where
the simulated
tissue signals other
sites.
As long as you
press
the button, a small part
of your
nervous
system
is
being
replaced
by
a computer
simulation
of
itself.
You
press
the button,
release
it, and press
it again.
You should
experience
no
difference.
As
soon
as you
are
satisfied,
the
simulation
connection
is established permanently.
The brain tissue
is now impotent—
it receives inputs and reacts as before but
its output
is ignored. Microscopic
manipulators on the hand's surface excise the cells in this superfluous tissue
and pass them to an aspirator, where they are drawn away.
The surgeon's hand
sinks
a fraction
of a
millimeter deeper
into your
brain, instantly compensating its measurements and signals for the changed
position.
The process
is
repeated for
the
next
layer, and soon
a second
simulation resides
in
the computer, communicating with the first and with
the remaining original brain tissue. Layer after layer the brain
is simulated,
then excavated.
Eventually your skull
is empty, and
the surgeon's hand
rests deep in your brainstem.
Though you have not
lost consciousness, or
even your train of thought, your mind has been removed from the brain and
transferred
to a machine.
In a final, disorienting step the surgeon
lifts out
his hand.
Your suddenly abandoned body goes into spasms and dies.
For a
moment you experience only quiet and dark. Then, once again, you can open
your eyes.
Your perspective has shifted.
The computer simulation has been
disconnected from
the cable leading
to the surgeon's hand and reconnected
to a shiny new body of the style,
color, and material of your choice.
Your
metamorphosis
is complete.
For the squeamish, there are other ways
to work the transfer of
human mind to machine. A high-resolution brain scan could, in one
fell swoop and without surgery, make a new you "While-U-Wait."
If even the
last technique
is too invasive
for you, imagine a more
psychological approach. A kind of portable computer (perhaps worn
like magic
glasses)
is programmed
with
the
universals
of human
mentality, your genetic makeup, and whatever details of your life are
conveniently available.
It carries a program that makes it an excellent
mimic. You carry this computer with you through the prime of your
life;
it diligently listens and watches; perhaps
it monitors your brain
and learns to anticipate your every move and response. Soon
it can
fool your friends on the phone with
its convincing imitation of you.
Grandfather Clause
111
When you die, this program is installed in a mechanical body that then
smoothly and seamlessly takes over your life and responsibilities.
If you happen
to be
a
vertebrate,
there
is
another option
that
combines the sales features of all the methods described above. The
vertebrate
brain
has two hemispheres connected by
several
large
bundles of nerve fibers. The largest
is called the corpus callosum.
In
the
1960s, guided by animal experiments, researchers
in California
successfully
treated
patients
w^ith
intractable types
of epilepsy by
severing their corpora callosa.
(Medical robots in the future will not
use Latin!) Amazingly, this procedure appeared at first to have no side
effects on the patients. The corpus callosum, with 200 million nerve
fibers, is the brain's most massive long-distance interconnect.
It is far
thicker than the optic nerve or the spinal cord. Cut the optic nerve and
the victim is utterly blind; sever the spinal cord and the body becomes
limp and numb.
But slice the huge cable between the hemispheres
and nothing bad happens.
Well, almost nothing.
If the name of an
object, like "brush,"
is flashed in the right half of the visual field of
view of a "split-brain" person, the person is unable to select the object
from among others with the
left hand but has no difficulty making
the choice with the right hand. Sometimes in the left-handed version
of the task, the right hand—apparently in exasperation—reaches over
to guide the left to the proper location!
Neuroanatomy suggests some of the explanation. The nerv^es direct-
ing the muscles of the left side of the body, as well as those portions of
the optic nerve viewing the left half of the visual scene, are connected
only to the right side of the brain.
Conversely, the
left side of the
brain controls the right side of the body and sees the right half of the
scene, as illustrated in the figure on page 113. Normally the two brain
halves work in an intimate partnership, and information discovered by
one is rapidly available to the other through the agency of the corpus
callosum. In a split-brain person, this information flow is broken. The
two brain halves must discover things independently. The left hand
knows not what the right
is doing.
The two halves
still seem to be
aware of each other's emotions, however, from information apparently
relayed through intact connecting nerves in the brainstem.
Roger Sperry of the California Institute of Technology, who received
a Nobel Prize in 1981 for his discoveries on the function of the corpus
callosum, found that in split-brain subjects each brain half seems to
host an independent, fully conscious, intelligent human personality. In
The Digital Migration
- The corpus callosum serves as a potential interface for external computers to eavesdrop on and eventually model human mental activity.
- Mind transfer could occur gradually as a computer replaces fading biological functions, eventually hosting the entire consciousness.
- Digitized minds could manipulate their own 'speed' settings, allowing them to think and react thousands of times faster than biological humans.
- Mind programs could be backed up on storage media, making permanent death nearly impossible through redundant copies.
- A digital consciousness could be transmitted via laser across the universe, inhabiting robotic bodies made of exotic materials like neutron stuff.
- The ability to tinker with one's own mental code would lead to profound, deliberate changes in personality and identity.
Ultimately your brain would die, and your mind would find itself entirely in the computer.
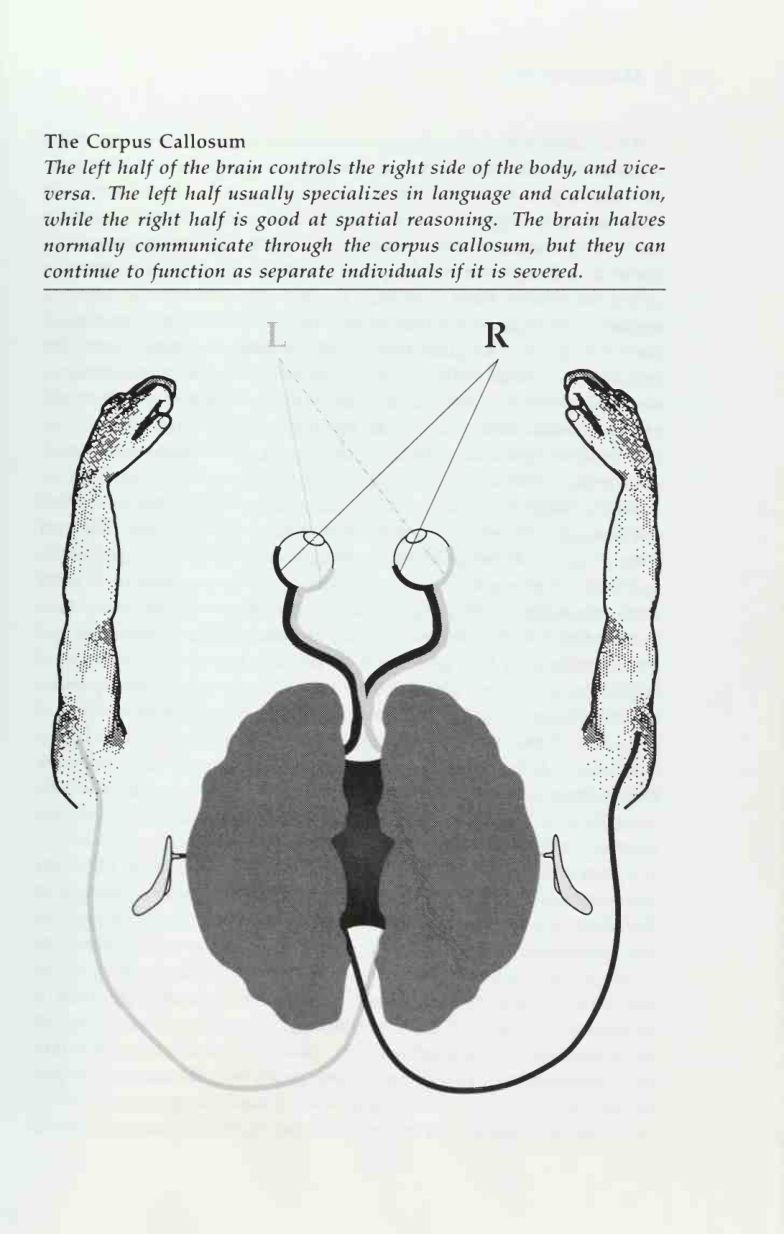
112
Mind Children
intact brains some of the corpus callosum fibers are known to handle
basic functions such as recombining the halves of the visual
fields
of the eyes, but others must communicate higher mental concepts
between the hemispheres. There is every reason to believe the corpus
callosum provides a neatly organized and very wide window into the
mental activities of both hemispheres. Suppose in the future, when the
function of the brain is sufficiently understood, your corpus callosum
is severed and cables leading to an external computer are connected
to the severed ends. The computer is programmed at first to pass the
traffic between the two hemispheres and
to eavesdrop on
it.
From
what
it learns by eavesdropping,
it constructs a model of your mental
activities.
After a while
it begins
to
insert
its own messages
into
the flow, gradually insinuating
itself into your thinking, endowing
you with new knowledge and new
skills.
In time, as your original
brain faded away with age, the computer would smoothly assume
the lost functions.
Ultimately your brain would die, and your mind
would
find
itself entirely
in the computer.
Perhaps, with advances
in high-resolution scanning,
it will be possible to achieve this effect
without messy surgery: you might simply wear some kind of helmet
or headband that monitored and altered the interhemispheric
traffic
with carefully controlled electromagnetic fields.
Many Changes
Whatever style of mind transfer you choose, as the process
is com-
pleted many of your old limitations melt away.
Your computer has
a control labeled
"speed."
It had been
set
at
"slow,"
to keep the
simulations synchronized with the old brain, but now you change
it
to "fast," allowing you to communicate, react, and think a thousand
times faster. The entire program can be copied into similar machines,
resulting in two or more thinking, feeling versions of you. You may
choose to move your mind from one computer to another that is more
technically advanced or better suited
to
a new environment.
The
program can also be copied to a future equivalent of magnetic tape.
Then,
if the machine you inhabit
is
fatally clobbered,
the tape can
be read into a blank computer, resulting in another you minus your
experiences since the copy.
With enough widely dispersed
copies,
your permanent death would be highly unlikely.
The Corpus Callosum
The left half of the brain controls the right side of the body, and vice-
versa.
The left half usually specializes in language and calculation,
while the right half
is good at spatial reasoning.
The brain halves
normally communicate through
the corpus callosum,
but they can
continue to function as separate individuals if it is severed.
114
Mind Children
As a computer program, your mind can
travel over information
channels,
for instance encoded as a
laser message beamed between
planets.
If you found
life on a neutron star and wished
to make a
field trip, you might devise a way to build a robot there of neutron
stuff,
then transmit your mind
to
it.
Since
nuclear
reactions
are
about a million times quicker than chemical ones, the neutron-you
might be able
to think a million times
faster.
You would
explore,
acquire new experiences and memories, and then beam your mind
back home.
Your original body could be kept dormant during the
trip and reactivated with the new memories when the return message
arrived—perhaps a minute later but with a subjective year's worth
of experiences.
Alternatively, the original could be kept active. Then
there would be two separate versions of you, with different memories
for the trip interval.
Your new abilities will dictate changes in your personality. Many of
the changes will result from your own deliberate tinkerings with your
own program. Having turned up your speed control a thousandfold,
you notice that you now have hours (subjectively speaking) to respond
to situations that previously required instant reactions. You have time,
during the
fall of a dropped
object,
to research the advantages and
disadvantages of trying
to catch
it, perhaps
to solve
its differential
equations of motion. You will have time to read and ponder an entire
on-line etiquette book when you find yourself in an awkward social
situation.
Faced with a broken machine, you will have time, before
touching
it, to learn
its theory of operation and to consider, in detail,
the various things that may be wrong with
it.
In general, you will
have time to undertake what would today count as major research
efforts to solve trivial everyday problems.
You will have the time, but will you have the patience? Or will a
thousandfold mental speedup simply incapacitate you with boredom?
Boredom
is a mental mechanism that keeps you from wasting your
time in profitless activity, but
if
it acts too soon or too aggressively
it
limits your attention
span, and
thus your
intelligence.
One of
the
first changes you
will want
to make
in your own program
is
to
retard
the onset of boredom beyond
the range found today
in
even the most extreme intellectuals. Having done that, you will find
yourself comfortably working on long problems with sidetracks upon
sidetracks.
In fact, your thoughts will routinely become so involved
that they will call for an increase in your short-term memory.
Your
The Fluidity of Digital Minds
- Subjective time acceleration allows for massive research efforts to solve trivial everyday problems, such as calculating the physics of a falling object.
- To survive a thousandfold mental speedup, individuals must artificially retard the onset of boredom and expand both short-term and long-term memory capacities.
- Identity becomes fluid through the ability to merge memories and skills between different copies of oneself or even between different individuals.
- The constant exchange of superior talents and experiences means that one's mind will eventually consist mostly of memories originated by others.
- Traditional concepts of life, death, and identity will dissolve as mental fragments are shuffled into temporary, ephemeral associations within a vast torrent of knowledge.
- Mind transfer technology could extend beyond humanity to include other large-brained species like dolphins, elephants, and giant squid.
In the long run you will remember mostly other people's experiences, while memories you originated will be incorporated into other minds.
114
Mind Children
As a computer program, your mind can
travel over information
channels,
for instance encoded as a
laser message beamed between
planets.
If you found
life on a neutron star and wished
to make a
field trip, you might devise a way to build a robot there of neutron
stuff,
then transmit your mind
to
it.
Since
nuclear
reactions
are
about a million times quicker than chemical ones, the neutron-you
might be able
to think a million times
faster.
You would
explore,
acquire new experiences and memories, and then beam your mind
back home.
Your original body could be kept dormant during the
trip and reactivated with the new memories when the return message
arrived—perhaps a minute later but with a subjective year's worth
of experiences.
Alternatively, the original could be kept active. Then
there would be two separate versions of you, with different memories
for the trip interval.
Your new abilities will dictate changes in your personality. Many of
the changes will result from your own deliberate tinkerings with your
own program. Having turned up your speed control a thousandfold,
you notice that you now have hours (subjectively speaking) to respond
to situations that previously required instant reactions. You have time,
during the
fall of a dropped
object,
to research the advantages and
disadvantages of trying
to catch
it, perhaps
to solve
its differential
equations of motion. You will have time to read and ponder an entire
on-line etiquette book when you find yourself in an awkward social
situation.
Faced with a broken machine, you will have time, before
touching
it, to learn
its theory of operation and to consider, in detail,
the various things that may be wrong with
it.
In general, you will
have time to undertake what would today count as major research
efforts to solve trivial everyday problems.
You will have the time, but will you have the patience? Or will a
thousandfold mental speedup simply incapacitate you with boredom?
Boredom
is a mental mechanism that keeps you from wasting your
time in profitless activity, but
if
it acts too soon or too aggressively
it
limits your attention
span, and
thus your
intelligence.
One of
the
first changes you
will want
to make
in your own program
is
to
retard
the onset of boredom beyond
the range found today
in
even the most extreme intellectuals. Having done that, you will find
yourself comfortably working on long problems with sidetracks upon
sidetracks.
In fact, your thoughts will routinely become so involved
that they will call for an increase in your short-term memory.
Your
Grandfather Clause
115
long-term memon^ also will have to be boosted, since a month's worth
of events will occupy a subjective span of a century!
These are but
the first of many changes.
I have alreadv mentioned the possibility of making copies of oneself,
with each copy undergoing its own adventures.
It should be possible
to merge memories from disparate copies into a single one. To avoid
confusion, memories of events would indicate in which body they
happened, just as our memories today often have a context that es-
tablishes a time and place for the remembered event. Merging should
be possible not only between two versions of the same individual but
also between different persons.
Selective mergings, involving some
of another person's memories and not others, would be a superior
form of communication, in which recollections,
skills, attitudes, and
personalities can be rapidly and effectively shared.
Your new body
will be able to carrv more memories than your original biological one,
but the accelerated information explosion will ensure the impossibility
of lugging around
all of civilization's knowledge.
You will have to
pick and choose what your mind contains
at any one time.
There
will often be knowledge and
skills
available from others superior
to your own, and the incentive to substitute those talents for yours
will be overwhelming.
In the long run you will remember mostly
other people's experiences, while memories you originated
will be
incorporated into other minds.
Concepts of
life, death, and identity
will lose their present meaning as your mental fragments and those of
others are combined, shuffled, and recombined into temporary asso-
ciations, sometimes large, sometimes small, sometimes long isolated
and highly individual, at other times ephemeral, mere ripples on the
rapids of civilization's torrent of knowledge.
There are foretastes of
this kind of fluidity around us. Culturally, individual humans acquire
new skills and attitudes from others throughout
life.
Geneticallv, in
sexual populations each individual organism is a temporary bundling
of genes that are combined and recombined in different arrangements
every generation.
Mind
transferral need not be limited
to human beings.
Earth has
other species with large brains, from dolphins, whose nervous systems
are as large and complex as our own, to elephants, other whales, and
perhaps giant squid, whose brains may range up
to twentv times
as big as ours.
Just what kind of minds and cultures these animals
possess is
still a matter of controversy, but their evolutionary history
Pattern Identity and Supercivilization
- The author proposes that brain-to-computer transfer could preserve the unique genetic and mental information of non-human animals, integrating their evolutionary history into a human-led cultural tapestry.
- A future 'supercivilization' is envisioned as a synthesis of all solar-system life, expanding outward to convert non-living matter into mind and potentially merging with other cosmic intelligences.
- The 'body-identity' position argues that mind-uploading is merely the creation of a deluded impostor and that the original person is effectively killed during the process.
- The author counters with 'pattern-identity,' which defines a person by the process and information in the brain rather than the physical machinery supporting it.
- Biological life already functions through pattern-identity, as the atoms and cells in a human body are constantly replaced while the individual's identity remains continuous.
If the process is preserved, I am preserved. The rest is mere jelly.
Grandfather Clause
115
long-term memon^ also will have to be boosted, since a month's worth
of events will occupy a subjective span of a century!
These are but
the first of many changes.
I have alreadv mentioned the possibility of making copies of oneself,
with each copy undergoing its own adventures.
It should be possible
to merge memories from disparate copies into a single one. To avoid
confusion, memories of events would indicate in which body they
happened, just as our memories today often have a context that es-
tablishes a time and place for the remembered event. Merging should
be possible not only between two versions of the same individual but
also between different persons.
Selective mergings, involving some
of another person's memories and not others, would be a superior
form of communication, in which recollections,
skills, attitudes, and
personalities can be rapidly and effectively shared.
Your new body
will be able to carrv more memories than your original biological one,
but the accelerated information explosion will ensure the impossibility
of lugging around
all of civilization's knowledge.
You will have to
pick and choose what your mind contains
at any one time.
There
will often be knowledge and
skills
available from others superior
to your own, and the incentive to substitute those talents for yours
will be overwhelming.
In the long run you will remember mostly
other people's experiences, while memories you originated
will be
incorporated into other minds.
Concepts of
life, death, and identity
will lose their present meaning as your mental fragments and those of
others are combined, shuffled, and recombined into temporary asso-
ciations, sometimes large, sometimes small, sometimes long isolated
and highly individual, at other times ephemeral, mere ripples on the
rapids of civilization's torrent of knowledge.
There are foretastes of
this kind of fluidity around us. Culturally, individual humans acquire
new skills and attitudes from others throughout
life.
Geneticallv, in
sexual populations each individual organism is a temporary bundling
of genes that are combined and recombined in different arrangements
every generation.
Mind
transferral need not be limited
to human beings.
Earth has
other species with large brains, from dolphins, whose nervous systems
are as large and complex as our own, to elephants, other whales, and
perhaps giant squid, whose brains may range up
to twentv times
as big as ours.
Just what kind of minds and cultures these animals
possess is
still a matter of controversy, but their evolutionary history
116
Mind Children
is as long as ours, and there
is surely much unique and hard-won
information encoded
genetically
in
their brain
structures and
their
memories. The brain-to-computer transferral methods that work for
humans should work as well for these large-brained animals, allowing
their thoughts,
skills, and motivations to be woven into our cultural
tapestry.
Slightly different methods, that focus more on genetics and
physical makeup than on mental
life, should allow the information
contained
in other living things with small or no nervous systems
to be popped
into the data banks.
The simplest organisms might
contribute little more than the information in their DNA. In this way
our future selves will be able to benefit from and build on what the
earth's biosphere has learned during its multibillion-year history. And
this knowledge may be more secure
if
it
is preserved
in databanks
spreading through the universe.
In the present scheme of things, on
our small and fragile earth, genes and ideas are often lost when the
conditions that gave rise to them change.
Our speculation ends in a supercivilization, the synthesis of all solar-
system life, constantly improving and extending itself, spreading out-
ward from the sun, converting nonlife into mind.
Just possibly there
are other such bubbles expanding from elsewhere. What happens
if
we meet one? A negotiated merger
is a possibility, requiring only a
translation scheme between the memory representations. This process,
possibly occurring now elsewhere, might convert the entire universe
into an extended thinking entity, a prelude to even greater things.
What Am I?
The
idea
that
a human mind
can be
transferred
to
a new body
sometimes meets the following strong objection from people who do
not dispute the theoretical possibility: "Regardless of how the copying
is done, the end result will be a new person.
If
it
is
I who am being
copied, the copy, though
it may think of itself as me, is simply a self-
deluded impostor.
If the copying process destroys the original, then
I
have been killed. That the copy may then have a great time exploring
the universe using my name and my skills is no comfort to my mortal
remains."
This point of view, which
1 will call the bodi/-identiti/ position, makes
life extension by duplication considerably less personally interesting.
I believe the objection can be overcome by acceptance of an alternative
Grandfather Clause
117
position which
I will call pattern-identity.
Body-identity assumes that
a person is defined by the stuff of which a human body is made. Only
by maintaining continuity of body stuff can we preserve an individual
person.
Pattern-identity, conversely, defines the essence of a person,
say myself, as the pattern and the process going on in my head and
body, not the machinery supporting that process.
If the process
is
preserved,
1 am preserved. The rest is mere jelly.
The body-identity position,
1 think, is based on a mistaken intuition
about the nature of living things.
In a subtle way, the preservation
of pattern and loss of substance is a normal part of everyday life. As
we humans eat and
excrete, old
cells within our bodies
die, break
up, and are expelled and replaced by copies made of fresh materials.
Most of our body is renewed this way every few years. The few body
components such as nerve cells that tend to be more static nevertheless
have metabolisms that cause their inner parts to be replaced, bit by bit.
Every atom present within us at birth
is likely to have been replaced
half way through our
life. Only our pattern, and only some of
it at
that, stays with us until our death.
Let me explore some of the consequences of the pattern-identity
position.
Matter
transmitters have appeared
often
in
the
science
fiction literature, at least since the invention of facsimile machines in
the late 1800s.
I raise the idea here only as a thought experiment,
to
simplify some
of the
issues
in my
mind-transfer
proposal.
A
facsimile transmitter scans a photograph
line by
line with a
light-
sensitive photocell and produces an electric current that varies with
the brightness of the scanned point in the picture. The varying electric
current is transmitted over wires to a remote location, where it controls
the brightness of a
light bulb
in a
facsimile
receiver.
The receiver
scans the bulb over photosensitive paper in the same pattern as the
transmitter. When this paper is developed, a duphcate of the original
photograph
is obtained.
This device was
a boon
to newspapers,
who were able to get illustrations from remote parts of the country
almost instantly, instead of waiting for a train to deHver photographic
plates.
If pictures, why not solid objects? A matter transmitter might scan
an object and identify
its atoms or molecules one at a time, perhaps
removing them in the process.
The identity of the atoms would be
transmitted
to a
receiver, where
a
duplicate of the
original
object
would be assembled in the same order from a local supply of atoms.
The Matter Transmitter Paradox
- The concept of matter transmission is explored as a thought experiment derived from the mechanics of 19th-century facsimile machines.
- A matter transmitter would theoretically scan an object's atomic structure and reconstruct it at a remote location using a local supply of atoms.
- The 'body-identity' perspective views this process as an execution, where the original person is killed and replaced by a duplicate impostor.
- The 'pattern-identity' perspective argues that the person is the information pattern itself, which moves continuously through the transmission beam.
- The author challenges the traditional 'one person, one body' assumption by comparing human identity to a digital message that can be replicated without losing its essence.
The transmitter scans and disassembles my jellylike body, but my pattern (me!) moves continuously from the dissolving jelly, through the transmitting beam, and ends up in other jelly at the destination.
Grandfather Clause
117
position which
I will call pattern-identity.
Body-identity assumes that
a person is defined by the stuff of which a human body is made. Only
by maintaining continuity of body stuff can we preserve an individual
person.
Pattern-identity, conversely, defines the essence of a person,
say myself, as the pattern and the process going on in my head and
body, not the machinery supporting that process.
If the process
is
preserved,
1 am preserved. The rest is mere jelly.
The body-identity position,
1 think, is based on a mistaken intuition
about the nature of living things.
In a subtle way, the preservation
of pattern and loss of substance is a normal part of everyday life. As
we humans eat and
excrete, old
cells within our bodies
die, break
up, and are expelled and replaced by copies made of fresh materials.
Most of our body is renewed this way every few years. The few body
components such as nerve cells that tend to be more static nevertheless
have metabolisms that cause their inner parts to be replaced, bit by bit.
Every atom present within us at birth
is likely to have been replaced
half way through our
life. Only our pattern, and only some of
it at
that, stays with us until our death.
Let me explore some of the consequences of the pattern-identity
position.
Matter
transmitters have appeared
often
in
the
science
fiction literature, at least since the invention of facsimile machines in
the late 1800s.
I raise the idea here only as a thought experiment,
to
simplify some
of the
issues
in my
mind-transfer
proposal.
A
facsimile transmitter scans a photograph
line by
line with a
light-
sensitive photocell and produces an electric current that varies with
the brightness of the scanned point in the picture. The varying electric
current is transmitted over wires to a remote location, where it controls
the brightness of a
light bulb
in a
facsimile
receiver.
The receiver
scans the bulb over photosensitive paper in the same pattern as the
transmitter. When this paper is developed, a duphcate of the original
photograph
is obtained.
This device was
a boon
to newspapers,
who were able to get illustrations from remote parts of the country
almost instantly, instead of waiting for a train to deHver photographic
plates.
If pictures, why not solid objects? A matter transmitter might scan
an object and identify
its atoms or molecules one at a time, perhaps
removing them in the process.
The identity of the atoms would be
transmitted
to a
receiver, where
a
duplicate of the
original
object
would be assembled in the same order from a local supply of atoms.
118
Mind Children
The technical problems are mind-boggling, but the principle is simple
to grasp, as millions of devotees of "Star Trek" will attest.
If solid objects, why not a person? Just stick him in the transmitter,
turn on the scan, and greet him when he walks from the receiver. But
is he really the same person?
If the system works well, the duplicate
will be indistinguishable from the original in any substantial way. Yet,
suppose that you
fail to turn on the receiver during the transmission
process.
The transmitter will scan and disassemble the victim and
send an unheard message to the inoperative receiver.
The original
person will be dead.
Doesn't the process,
in
fact,
kill the original
person whether or not there
is an active receiver?
Isn't the duplicate
just that, merely a copy? Or suppose that two receivers respond to the
message from one transmitter. Which,
if either, of the two duplicates
is the real original?
The body-identity position on this question is clear. A matter trans-
mitter is an elaborate execution device that kills you and substitutes a
clever impostor in your place.
The pattern-identity position offers
a
different perspective.
Suppose
that
I
step
into
the transmission
chamber. The transmitter scans and disassembles my jellylike body,
but my pattern (me!)
moves continuously from the dissolving
jelly,
through
the transmitting beam, and ends up
in
other
jelly
at
the
destination. At no instant was the pattern (I) ever destroyed. But what
about the question of duplicates? Suppose that the matter transmitter
is connected to two receivers instead of one.
After the transfer there
will be a copy of me in each one. Surely at least one of them is a mere
copy: they cannot both be me, right? Wrong!
Rooted in all our past experience is the assumption that one person
corresponds to one body.
In light of the possibility of separating mind
from matter and storing and transmitting
it, this simple, natural, and
obvious identification becomes confusing and misleading.
Consider
the message, "I am not jelly." As
I type
it,
it goes from my brain into
the keyboard of my computer, through myriads of electronic circuits,
and over great amounts
of wire.
After countless adventures,
the
message shows up in bunches of books like the one you are holding.
How many messages were there?
I claim that it is most useful to think
there is only one, despite its massive replication.
If
I repeat
it here:
"I
am not jelly," there is
still only one message. Only
if
I change
it in a
significant manner ("I am not peanut butter") do we have a second
message.
And
the message
is not destroyed
until the
last written
The Pattern of Identity
- Identity is defined as the information pattern of a person rather than the physical medium on which it is encoded.
- While a copy and an original are identical at the moment of creation, they diverge into unique individuals over time as they accumulate different experiences.
- The existence of a recent backup could mitigate the finality of death, reducing it to a 'small patch of amnesia' rather than total loss.
- The instinctive fear of death is viewed as an evolutionary hangover that persists even when the technical rules of life and survival are rewritten.
- The ability to migrate a mind between different processors or storage media creates a functional dualism where the mind is independent of specific machinery.
- A simulated mind could remain continuous and uninterrupted even while its underlying physical location and hardware change constantly.
Old instincts are not automatically erased when the rules of life are suddenly rewritten.
Grandfather
(
^^
version
is lost and until
it fades sufficiently in everybody's m
to be unreconstructable. The message is the information conveye
,
..v^i
the medium on which
it is encoded. The "pattern" that
I claim is the
real me has the same properties as this message. Making a momentary
copy of my state, whether on tape or in another functional body, does
not make two persons.
The "process" aspect is a little more complicated. At the instant that
a "person message" is assembled, it is just another copy of the original.
But if two copies are active, they will in time diverge and become two
different people. Just how far this differentiation must proceed before
society grants them unique identities is about as problematical as the
questions "When does a fetus become a person?"
or "When does an
evolving species become a different species?" But if we wait zero time,
then both copies are the same person—if we immediately destroy one,
the person still exists in the other copy. All the deeds that that person
might have done, and
all the thoughts she might have thought, are
still possible.
If, instead, we allow both copies to live their separate
lives for a year and then destroy one, we are the murderers of a unique
human being. But
if we wait just a short time before destroying one
copy, then only a little unique information is lost.
This rationale might be a comfort
if you were about to encounter
danger but knew that a tape copy of you had been made recently.
Should you
die, an active copy made from the tape could resume
your life. This copy would differ slightly from the version of you that
died,
in that
it lacked the memories since the time of copy.
But a
small patch of amnesia
is a trivial affair compared with the total loss
of memory and function that results from death in the absence of a
copy.
Intellectual acceptance that a secure and recent backup of you exists
would not necessarily protect you from an extreme desire to preserve
yourself
if faced with imminent death, even in a worthwhile cause.
Such
feelings would be an evolutionary hangover from your one-
copy
past, no more
in tune with
reality than
fear of flying
is an
appropriate response to present airline accident rates. Old instincts are
not automatically erased when the rules of life are suddenly rewritten.
The
pattern-identity
position
has
clear
dualistic
implications— it
allows
the mind
to be separated from
the body.
Though mind
is
entirely the consequence of interacting matter, the ability
to copy
it
from one storage medium to another would give
it an independence
120
Mind Children
and an
identity apart from
the machinery
that runs
the program.
The duahsm will be especially apparent
if we consider some of the
different possibilities for encoding.
Some supercomputers have myriads of individual computers inter-
connected by a network that allows free flow of information among
them. An operating system
for this arrangement might allow indi-
vidual processes
to migrate from one processor to another in mid-
computation,
in a kind of juggling act that permits more processes
than there are processors.
If a human mind
is installed in a future
machine of this variety, functions originally performed by particular
parts
of the brain might be encoded
in
particular processes.
The
juggling action would ensure that operations occurring in fixed areas
in the original brain would move rapidly from place to place within
the machine.
If the computer
is running other programs besides the
mind simulation, then the simulation might find
itself shuffled into
entirely different sets of processors from moment
to moment.
The
thinking process would be uninterrupted, even as
its location and
physical machinery changed continuously, because the pattern would
be maintained.
The most
direct way
of performing complex operations such
as
occur in a human mind are often not the most efficient. A process that
is described as a long sequence of steps in a program can sometimes
be
transformed
mathematically
into one
that
arrives
at
the same
conclusion
in
far fewer operations.
As
a young
boy,
the famous
mathematician Carl Friedrich Gauss was a school smart aleck.
For
a diversion,
a teacher once
set him
the problem of adding up the
all the numbers between
1 and
100.
He returned with the correct
answer
in
less than
a
minute.
He had
noticed
that
the hundred
numbers could be grouped into
fifty pairs,
1-t-lOO, 2+99, 3+98, 4+97,
and so on, each pair adding up to 101.
Fifty times 101
is 5,050, the
answer, found without a
lot of tedious addition.
Similar speedups
are possible
in complex computer processes.
So
called
optimizing
compilers have repertoires of accelerating transformations, some quite
radical, to streamline programs they translate. The key may be a total
reorganization in the order of the computation and the representation
of the data.
One powerful
class
of transformations
takes an
array
of values
and combines them in systematic ways to produce another array, so
that each element of the new array
is a number formed by a unique
Mathematical Transformations of Mind
- Human mental processes are often inefficient and can be mathematically transformed into faster, more streamlined operations.
- The story of young Gauss illustrates how reorganizing data into pairs can bypass tedious, linear computation.
- Optimizing compilers use radical transformations to reorganize data and computation, sometimes diffusing single events across multiple processors.
- A simulated person remains intact after such transformations because the mind is an abstract mathematical property, not a particular pattern.
- True immortality requires constant adaptation and the discarding of old parts to meet the escalating standards of a 'cosmic Olympics.'
- Personal identity is eventually eroded by external challenges, making traditional immortality a temporary comfort for human sentimentality.
Though we are immortals, we must die bit by bit if we are to succeed in the the qualifying event—continued survival.
120
Mind Children
and an
identity apart from
the machinery
that runs
the program.
The duahsm will be especially apparent
if we consider some of the
different possibilities for encoding.
Some supercomputers have myriads of individual computers inter-
connected by a network that allows free flow of information among
them. An operating system
for this arrangement might allow indi-
vidual processes
to migrate from one processor to another in mid-
computation,
in a kind of juggling act that permits more processes
than there are processors.
If a human mind
is installed in a future
machine of this variety, functions originally performed by particular
parts
of the brain might be encoded
in
particular processes.
The
juggling action would ensure that operations occurring in fixed areas
in the original brain would move rapidly from place to place within
the machine.
If the computer
is running other programs besides the
mind simulation, then the simulation might find
itself shuffled into
entirely different sets of processors from moment
to moment.
The
thinking process would be uninterrupted, even as
its location and
physical machinery changed continuously, because the pattern would
be maintained.
The most
direct way
of performing complex operations such
as
occur in a human mind are often not the most efficient. A process that
is described as a long sequence of steps in a program can sometimes
be
transformed
mathematically
into one
that
arrives
at
the same
conclusion
in
far fewer operations.
As
a young
boy,
the famous
mathematician Carl Friedrich Gauss was a school smart aleck.
For
a diversion,
a teacher once
set him
the problem of adding up the
all the numbers between
1 and
100.
He returned with the correct
answer
in
less than
a
minute.
He had
noticed
that
the hundred
numbers could be grouped into
fifty pairs,
1-t-lOO, 2+99, 3+98, 4+97,
and so on, each pair adding up to 101.
Fifty times 101
is 5,050, the
answer, found without a
lot of tedious addition.
Similar speedups
are possible
in complex computer processes.
So
called
optimizing
compilers have repertoires of accelerating transformations, some quite
radical, to streamline programs they translate. The key may be a total
reorganization in the order of the computation and the representation
of the data.
One powerful
class
of transformations
takes an
array
of values
and combines them in systematic ways to produce another array, so
that each element of the new array
is a number formed by a unique
Grandfather Clause
combination of all the elements of the old array. An operation on a
single element in the new array can then often substitute for a whole
host of operations on the original array, making enormous efficiencies
possible.
Analogous transformations in time also work:
a sequence
of operations can be changed into an equivalent one, where each new
step does a tinv fraction of the work of every one of the original steps.
The localized
is diffused, and the diffuse
is
localized.
A program
can quickly be altered beyond
recognition by a few mathematical
rewrites of this power. Run on a multiprocessor, single events in the
original formulation may appear in the transformed program only as
correlations between events in remote machines at remote times.
Yet
in a mathematical sense the transformed computation
is exactly the
same as the original one.
If we were thus to transform a program that simulates a person, the
person would remain
intact:
his mind
is the abstract mathematical
property that
is shared by the old and the transformed programs;
it
does not depend on the particular form of
its program.
Mind, as
I
have defined
it,
is thus not only not tied to a particular body, it is not
even bound to a particular pattern.
It can be represented by any one of
an infinite class of patterns that are equivalent onlv in a certain, very
abstract way.
(This observation tempts me into a brief philosophical
extrapolation in Appendix 3.)
Immortality of the type
I have just described
is only a temporary
defense against the wanton loss of knowledge and function that
is
the worst aspect of personal death.
In the long run, our survival will
require changes that are not of our own choosing.
Parts of us will
have to be discarded and replaced by new parts to keep in step with
changing conditions and evolving competitors. Surviving means play-
ing in a kind of cosmic Olympics, with each year bringing new events
and escalated standards in old events. Though we are immortals, we
must die bit by bit
if we are to succeed in the the qualifying event
continued survival.
In time, each of us will be a completely changed
being, shaped more by external challenges than by our own desires.
Our present memories and interests, having lost their relevance, will
at best end up
in a dusty archive, perhaps to be consulted once in
a long while by a
historian.
Personal death as we know
it differs
from this inevitability only in its relative abruptness. Viewed this way,
personal immortality by mind transplant is a technique whose primary
benefit
is to temporarily coddle the sensibility and sentimentality of
121
Immortality and Wholesale Resurrection
- Human civilization and its artificial descendants are part of a continuous evolutionary process where change and growth are essential for survival.
- The concept of pattern-identity suggests that a person reconstructed through inference is just as real as one reconstituted from an intact recording.
- Superintelligent archaeologists could use atomic-scale measurements and historical data to reconstruct long-dead individuals in near-perfect detail.
- Time-symmetrical laws of physics allow for powerful simulations to be run in reverse, effectively 'predicting' the past based on current data.
- Wholesale resurrection of the past may be possible through immense simulators that account for all available information and physical laws.
The ancestral individual is always doomed as its heritage is nibbled away to meet short-term environmental challenges.
122
Mind Children
individual humans.
It seems to me that our civilization will evolve in
the same direction whether or not we transplant our minds and join
the robots.
The ancestral individual is always doomed as its heritage is nibbled
away to meet short-term environmental challenges.
Yet
this evolu-
tionary
process, seen
in a more positive
light, means
that we are
already immortal, as we have been since the dawn of life. Our genes
and our culture pass continuously from one generation to the next,
subject only to incremental alterations to meet the constant demand
for new world records in the cosmic games.
And even within our
personal life, who among us would wish to remain static, possessing
for a lifetime the same knowledge, memories, thoughts, and skills we
had as children? Human beings value change and growth, and our
artificial descendants will share this value with us—their survival, like
ours, will depend on
it.
Awakening the Past
The ability to transplant minds will make it easy to bring to life anyone
who has been carefully recorded on
a storage medium.
But what
if some of the transcription has been lost?
It should be possible to
reconstruct many missing pieces from other information—the person's
genetic code, for instance, or filmstrips of the person in life, samples of
handwriting, medical records, memories of associates, and so on. Very
effective sleuthing should be possible in a world of superintelligences
with astronomical powers of observation and deduction. The pattern-
identity
position
implies
that
a person
reconstructed by
inference
would be just as real as one reconstituted from an intact tape. The only
difference is that in the former case some of the person's pattern was
temporarily diffused in the environment before being reassembled.
But what
if no tape
existed
at
all?
Archaeologists today make
plausible inferences about historical figures from scraps of old docu-
ments, pottery sherds, x-ray scans of mummified bodies, other known
historical facts, general knowledge about human nature, and whatever
else they can
find.
Creators of
historical
fiction use such data
to
construct
detailed
scenarios
of how
things might have happened.
Superintelligent archaeologists armed with wonder-instruments (that
might, for instance, make atomic-scale measurements of deeply buried
objects) should be able to carry this process to a point where long-dead
Grandfather Clause
people can be reconstructed in near-perfect detail at any stage of their
life.
Wholesale resurrection may be possible through the use of immense
simulators. Powerful computers are used today to predict the course
of the planets and spacecraft. The precise trajectory that took Voyager
2 past Jupiter, Saturn, Uranus, and their moons, and will soon take
it by
Neptune, was
calculated by
repeated
simulations
in which
different
starting
times,
directions, and
velocities
of the spacecraft
were tried until a correct combination was found. More dramatically,
if less accurately, modern weather programs simulate the action of
the atmosphere over the entire globe. New aircraft designs, nuclear
explosions, and an increasing number of other things are these days
first tested in simulators.
Such simulations give peeks into possible
futures and thus confer the power to choose among them.
Because
the laws of physics are symmetrical in time, simulations can usually
be run in reverse as well as forward and can be used to "predict" the
past, perhaps guided by old measurements or archeological data. As
with future predictions, any uncertainty in the initial measurements,
or
in
the rule
that evolves
the
initial
state,
will allow
for several
possible outcomes.
If the simulation
is detailed enough and
is given
all available information, then
all of its "predictions" are valid: Any
of the possible pasts may have led to the present situation.
This
is
a
strange idea
if you
are accustomed
to looking
at
the
world
in
a
strictly
linear,
deterministic
way,
but
it
parallels
the
uncertain world described by quantum mechanics. Now, imagine an
immense simulator
(1 imagine
it made out of a superdense neutron
star) that can model the whole surface of the earth on an atomic scale
and can run time forward and back and produce different plausible
outcomes by making
different random choices
at key points
in
its
calculation.
Because of the great detail, this simulator models living
things, including humans, in their full complexity.
According to the
pattern-identity position, such simulated people would be as real as
you or me, though imprisoned in the simulator.
We could join them through a magic-glasses interface, which con-
nects
to
a
"puppet" deep
inside
the simulation and
allows us
to
experience the puppet's sensory environment and to naturally control
its actions. More radically, we could "download" our minds directly
into a body in the simulation and "upload" back into the real world
when our mission
is accomplished.
Alternatively, we could bring
123
Simulated Realities and Postbiological Evolution
- A superdense simulator could model Earth at an atomic scale, creating simulated people who are as real as biological ones under the pattern-identity theory.
- Humans could interact with these simulations via 'puppet' interfaces or by downloading their consciousness directly into the simulated environment.
- Advanced civilizations could potentially resurrect every past inhabitant of Earth, treating the restoration of a single planet as 'child's play' before galactic colonization.
- The postbiological world will evolve rapidly, ranging from tiny intelligences to star-spanning superminds that function like cooperative ant colonies.
- Despite the transition to digital forms, postbiological life will still face competition, failures, and 'diseases of the flesh' in the form of mechanical parasites and viruses.
- The complexity of future machines will inevitably support a diverse ecosystem of digital freeloaders that evolve alongside polite society.
Resurrecting one small planet should be child's play long before our civilization has colonized even its first galaxy.
Grandfather Clause
people can be reconstructed in near-perfect detail at any stage of their
life.
Wholesale resurrection may be possible through the use of immense
simulators. Powerful computers are used today to predict the course
of the planets and spacecraft. The precise trajectory that took Voyager
2 past Jupiter, Saturn, Uranus, and their moons, and will soon take
it by
Neptune, was
calculated by
repeated
simulations
in which
different
starting
times,
directions, and
velocities
of the spacecraft
were tried until a correct combination was found. More dramatically,
if less accurately, modern weather programs simulate the action of
the atmosphere over the entire globe. New aircraft designs, nuclear
explosions, and an increasing number of other things are these days
first tested in simulators.
Such simulations give peeks into possible
futures and thus confer the power to choose among them.
Because
the laws of physics are symmetrical in time, simulations can usually
be run in reverse as well as forward and can be used to "predict" the
past, perhaps guided by old measurements or archeological data. As
with future predictions, any uncertainty in the initial measurements,
or
in
the rule
that evolves
the
initial
state,
will allow
for several
possible outcomes.
If the simulation
is detailed enough and
is given
all available information, then
all of its "predictions" are valid: Any
of the possible pasts may have led to the present situation.
This
is
a
strange idea
if you
are accustomed
to looking
at
the
world
in
a
strictly
linear,
deterministic
way,
but
it
parallels
the
uncertain world described by quantum mechanics. Now, imagine an
immense simulator
(1 imagine
it made out of a superdense neutron
star) that can model the whole surface of the earth on an atomic scale
and can run time forward and back and produce different plausible
outcomes by making
different random choices
at key points
in
its
calculation.
Because of the great detail, this simulator models living
things, including humans, in their full complexity.
According to the
pattern-identity position, such simulated people would be as real as
you or me, though imprisoned in the simulator.
We could join them through a magic-glasses interface, which con-
nects
to
a
"puppet" deep
inside
the simulation and
allows us
to
experience the puppet's sensory environment and to naturally control
its actions. More radically, we could "download" our minds directly
into a body in the simulation and "upload" back into the real world
when our mission
is accomplished.
Alternatively, we could bring
123
124
Mind Children
people out of the simulation by reversing the process—linking their
minds to an outside robot body, or uploading them directly into
it.
In
all cases we would have the opportunity to recreate the past and to
interact with
it in a real and direct fashion.
It might be fun
to resurrect
all the past inhabitants of the earth
this way and
to give them an opportunity
to share with us in the
(ephemeral)
immortality
of transplanted
minds.
Resurrecting one
small planet should be child's play long before our civilization has
colonized even its first galaxy.
Wildlife
THE
postbiological world will host a great range
of individuals constituted from libraries of accumulated knowledge.
In its earlv stages, as it evolves from the world we know, the scale and
function of these individuals will be approximately that of humans.
But this transitional stage will be just a launching point for a rapid
evolution
in many novel directions,
as each individual mutates by
dropping unneeded
traits and adding new ones from the growing
data banks. A spectrum of scales will come to exist—from tiny, barely
intelligent configurations for tight spaces to star-spanning superminds
for big problems. The distinctions will not always be clear—a super-
mind might be composed
of myriads of closely cooperating minor
intelligences, analogous in their interactions to an ant colony.
Superintelligence is not perfection—spectacular failures are certain.
For this reason, diversity
is to be desired and expected. Independent
centers
of
activity
will compete.
Lines
of development
will meet
dead ends.
Life, in fact, will proceed much as
it does in the earth's
biosphere,
only on
a
vaster,
faster, and more diverse
scale.
And
though
at
first thought
a
leap out
of our biological bodies might
seem
to
free us of the diseases of the
flesh—alas,
it
is not
so.
As
with
terrestrial
life,
freeloaders
will
lurk
in
the
interstices
of
the
postbiological world, making uninvited livings at the expense of their
hosts.
These pests
will evolve from the same
stuff that constitutes
polite
society.
Their
effects often
will be
subtle enough
to escape
detection, but some pests will be as large, powerful, and
visible as
their hosts.
In any case,
interactions within
a postbiological world
will share many characteristics of relations that shape the world we
know.
125
126
Mind Children
Trojan Horses, Time Bombs, and Viruses
If the world of
artificial machinery has seemed
disease-free so
far,
it
is only because our machines have been too simple
to support
mechanical
parasites.
But computers have changed
that,
as
they
have changed so much
else.
Diseases have appeared
in computer
systems
for
at
least two decades, but 1988 was
the
first big year
for computer plagues,
as almost every type of machine,
large and
small, was attacked by several "computer viruses" that were spread
through computer networks and by promiscuous sharing of computer
software.
Most data diseases are deliberate constructions of playful
or malicious programmers, but some evolved by accident.
Deceptive programs that have been called
Trojan horses have ap-
peared from time to time since the 1960s. Written by clever program-
mers as practical jokes, in response to a challenge, or for more shady
reasons, Trojan horses masquerade as interesting or useful programs.
But once activated, they may begin to secretly compromise restricted
information, or erase the victim's disk
files, or at
least print scary
messages. A dangerous variant of the Trojan horse delays
its attack.
Because the malign action
is not immediately manifested, such time
bombs in apparently harmless programs are likely to be copied much
more widely and consequently do more damage when they eventually
strike.
Until the late 1970s, software was distributed by hand in the form
of punched paper tape, decks of punched cards, or magnetic tape.
Distribution was limited, and
it was often easy
to trace the source
of a program. The resulting accountability must have inhibited many
infections at their source.
1 myself created a potentially nasty infection
in 1968. The machine involved was a small one, an IBM 1130, that read
its programs in the form of decks of punched cards fed
in through
a
unit
that could both read cards and punch them.
In
a burst of
creativity lasting a few days, a friend and
I created a single punched
card that masqueraded as a "cold-start" card used for resuscitating the
computer after a power shutdown or a crash. But instead of starting
up the system, our card caused a duplicate of itself to be punched
in every card following
it. Used by an unsuspecting programmer,
it
would have destroyed a program deck and produced many copies of
itself to create future havoc.
1 remember holding the innocent-looking
card in my hand and contemplating its destructive power with awe.
The Evolution of Computer Viruses
- Computer viruses and Trojan horses emerged as both deliberate malicious acts and accidental evolutions of software.
- Early software distribution via physical media like punched cards provided a level of accountability that inhibited widespread infections.
- The author recounts creating a self-replicating punched card in 1968 that could have destroyed program decks but chose to destroy it.
- Software manufacturers have historically used 'time bombs' to disable unauthorized copies, sometimes resulting in accidental data loss for legitimate users.
- Modern digital networks and promiscuous software sharing have replaced physical distribution, allowing infections to spread with unprecedented speed.
- Subtle Trojan horses are often designed as spies to harvest passwords and gain unauthorized access rather than to simply vandalize systems.
I remember holding the innocent-looking card in my hand and contemplating its destructive power with awe.
126
Mind Children
Trojan Horses, Time Bombs, and Viruses
If the world of
artificial machinery has seemed
disease-free so
far,
it
is only because our machines have been too simple
to support
mechanical
parasites.
But computers have changed
that,
as
they
have changed so much
else.
Diseases have appeared
in computer
systems
for
at
least two decades, but 1988 was
the
first big year
for computer plagues,
as almost every type of machine,
large and
small, was attacked by several "computer viruses" that were spread
through computer networks and by promiscuous sharing of computer
software.
Most data diseases are deliberate constructions of playful
or malicious programmers, but some evolved by accident.
Deceptive programs that have been called
Trojan horses have ap-
peared from time to time since the 1960s. Written by clever program-
mers as practical jokes, in response to a challenge, or for more shady
reasons, Trojan horses masquerade as interesting or useful programs.
But once activated, they may begin to secretly compromise restricted
information, or erase the victim's disk
files, or at
least print scary
messages. A dangerous variant of the Trojan horse delays
its attack.
Because the malign action
is not immediately manifested, such time
bombs in apparently harmless programs are likely to be copied much
more widely and consequently do more damage when they eventually
strike.
Until the late 1970s, software was distributed by hand in the form
of punched paper tape, decks of punched cards, or magnetic tape.
Distribution was limited, and
it was often easy
to trace the source
of a program. The resulting accountability must have inhibited many
infections at their source.
1 myself created a potentially nasty infection
in 1968. The machine involved was a small one, an IBM 1130, that read
its programs in the form of decks of punched cards fed
in through
a
unit
that could both read cards and punch them.
In
a burst of
creativity lasting a few days, a friend and
I created a single punched
card that masqueraded as a "cold-start" card used for resuscitating the
computer after a power shutdown or a crash. But instead of starting
up the system, our card caused a duplicate of itself to be punched
in every card following
it. Used by an unsuspecting programmer,
it
would have destroyed a program deck and produced many copies of
itself to create future havoc.
1 remember holding the innocent-looking
card in my hand and contemplating its destructive power with awe.
Wildlife
127
With some reluctance, we decided to destroy all the copies of the card
(after a few hours of testing, there were many copies of each of several
variations of it around!).
I like to think we did the right thing simply
because of our good sense of values, but the probability that we would
not remain anonymous must have weighed into the decision.
Programs sold for profit are easy to copy and often make their way
to machines other than those of the original paying customers. This is
certainly the case now in the era of personal computers, but even in the
sixties and seventies it was perceived as a problem with large systems.
Manufacturers of software for large computers and
for micros have
been known to insert time bombs to thwart unauthorized use of their
wares. The more benign bombs merely prevent the copied program
from working after a certain period.
Perhaps the intent
is to give
the nonpaying customer time to become dependent on the program,
so when
it ceases to function he will be inclined to buy a legitimate
version.
More vindictive bombs have occasionally appeared.
These
usually delete files, but a few have exploited unusual properties of the
hardware in order to physically damage the computer. Because paying
customers have often been victimized by an accidentally triggered
bomb, the general reaction to this approach to copyright violation
is
very negative, and the practice seems to have declined.
I am aware of several instances where time-sharing systems were
assaulted by a more subtle variety of Trojan horse. The intent was not
to vandalize or terrorize but to gain unauthorized access.
In this case
the program acts like a spy and uses
its special location to uncover
information, such as a victim's secret passwords, which it then records
in a
location accessible to
its author.
In some attacks the program
mimics the computer operating system's "log-in" procedure, by which
users gain access to the computer by typing their identification and a
secret password. Another form of attack exploits the property of most
operating systems that a running program acquires all of its user's file-
access rights. A program whose cover is some useful service can then,
surreptitiously, rummage through the victim's disk
files for wanted
information.
In a successful attack, the victim remains oblivious of
the breach.
In the late 1970s cheap personal computers created a new medium
for software and software diseases. The spread of both was facilitated
by computer bulletin boards, systems maintained by enthusiasts that
allowed other computer owners to dial up and post messages and
The Rise of Software Wildlife
- Early cyberattacks utilized deceptive techniques like mimicking login procedures or exploiting user file-access rights to surreptitiously rummage through data.
- The advent of cheap personal computers and bulletin board systems in the late 1970s created a medium for the 'promiscuous sharing' of software and diseases.
- Computer viruses function as program fragments that replicate by inserting themselves into other programs, mirroring the behavior of biological viruses.
- Experimental tests in the mid-1980s demonstrated that viruses could achieve near-total infection of secure systems in less than a day by targeting high-access users.
- While some viruses are minor nuisances, others act as Trojan horses or time bombs designed for espionage, sabotage, or large-scale data erasure.
Such facilities offered both anonymity and promiscuous sharing of data and, as with the sexual revolution, a raft of opportunities for disease.
Wildlife
127
With some reluctance, we decided to destroy all the copies of the card
(after a few hours of testing, there were many copies of each of several
variations of it around!).
I like to think we did the right thing simply
because of our good sense of values, but the probability that we would
not remain anonymous must have weighed into the decision.
Programs sold for profit are easy to copy and often make their way
to machines other than those of the original paying customers. This is
certainly the case now in the era of personal computers, but even in the
sixties and seventies it was perceived as a problem with large systems.
Manufacturers of software for large computers and
for micros have
been known to insert time bombs to thwart unauthorized use of their
wares. The more benign bombs merely prevent the copied program
from working after a certain period.
Perhaps the intent
is to give
the nonpaying customer time to become dependent on the program,
so when
it ceases to function he will be inclined to buy a legitimate
version.
More vindictive bombs have occasionally appeared.
These
usually delete files, but a few have exploited unusual properties of the
hardware in order to physically damage the computer. Because paying
customers have often been victimized by an accidentally triggered
bomb, the general reaction to this approach to copyright violation
is
very negative, and the practice seems to have declined.
I am aware of several instances where time-sharing systems were
assaulted by a more subtle variety of Trojan horse. The intent was not
to vandalize or terrorize but to gain unauthorized access.
In this case
the program acts like a spy and uses
its special location to uncover
information, such as a victim's secret passwords, which it then records
in a
location accessible to
its author.
In some attacks the program
mimics the computer operating system's "log-in" procedure, by which
users gain access to the computer by typing their identification and a
secret password. Another form of attack exploits the property of most
operating systems that a running program acquires all of its user's file-
access rights. A program whose cover is some useful service can then,
surreptitiously, rummage through the victim's disk
files for wanted
information.
In a successful attack, the victim remains oblivious of
the breach.
In the late 1970s cheap personal computers created a new medium
for software and software diseases. The spread of both was facilitated
by computer bulletin boards, systems maintained by enthusiasts that
allowed other computer owners to dial up and post messages and
128
Mind Children
programs that could be accessed by anyone else who dialed in. Such
facilities offered both anonymity and promiscuous sharing of data
and, as with the sexual revolution, a raft of opportunities for disease.
By the early 1980s the newspapers began to report instances of random
havoc in personal computers caused by programs downloaded from
computer
bulletin
boards, programs
that purported
to be games,
accounting software, or whatever.
The most virulent known form of software wildlife has been called
a virus—a program fragment that, once inserted into a large program,
acts to copy itself into other programs, just as a biological virus
is a
piece of genetic code that, once inserted into a cell, acts to copy itself
into other cells. The analogy is a strong one, because today's milUon-
bit computer programs have about the same information content as
the genetic codes of bacteria, and the few thousand bits of a typical
computer
virus
is
a good match
for
the
small
genetic code
of
a
biological
virus.
When
a program containing
a
virus
is invoked,
the virus is momentarily activated.
It looks through
its unsuspecting
victim's files for uninfected but accessible programs and inserts a copy
of itself into one or more of them. These newly infected programs will
repeat the process when they are themselves activated. Experimental
tests of this idea conducted in the mid-1980s by Fred Cohen of the
University of Southern California resulted in almost total infection of
supposedly secure computer systems in less than a day. The infections
easily spread from
restricted
users
to ones with
greater
access
to
the
files of others.
System managers are exposed when,
in keeping
abreast of developments on their machines, they try out new programs
announced by their users. Once a manager's programs are infected,
the rest of a system quickly succumbs.
A
virus
that merely
spreads
is
a minor
nuisance,
taking up
a
little storage space in
its many copies and a
little of the computer's
time in
its reproductive
activities.
One quiet
little virus created
in
1978, that infects only the operating system, has apparently spread to
virtually every Apple II system disk in existence.
But, as with a Trojan
horse, a virus can carry with
it instructions for espionage, sabotage,
or
theft.
Several variants of a virus created as an
act of terrorism
were detected spreading among IBM
personal computers
in
Israel
early in 1988.
Examination of the virus revealed that
it was a time
bomb programmed to erase
files on Israel's 40th Independence Day.
It was discovered early because
it had a flaw— it could repeatedly
Wildlife
129
infect the same program.
In time infected disks became nearly
full
because
their
files were bloated with multiple copies
of the
virus.
Viruses have naturally been
a matter of special concern
to people
who are charged with government and commercial computer security.
A
cleverly engineered
virus might
infect
the most secure
parts of
an international banking or national defense network,
for example.
A
clever human embezzler
or spy with only minor access
to the
system could create a software accomplice to liberate funds or secrets.
Botched attempts of this kind have made the news from time to time.
The successful assaults get no publicity.
Today's computer systems are like bodies with skins but no immune
systems, or like walled cities without police. They can deflect some
external
attacks but
are defenseless once an
intruder has
entered.
Internal
protection
is
possible, though no defense
is
perfect.
One
approach
is simply to build more walls.
The easiest mode of viral
spread
can be blocked by
preventing one program from
altering
another one—but legitimate purposes would be inhibited as well.
It
would,
for instance, no longer be possible
to "patch" programs to
correct newly discovered errors in them. A new facility for patching
could be installed in the operating system, but
it would then itself be
a potential gateway for viruses.
Instead of erecting blockades, another approach
is to actively hunt
viruses down.
And,
in
fact,
a
first generation of virus
killers has
appeared on the heels of the first generation of viruses. One kind is a
program that examines other programs— it detects particular viruses
by the telltale pattern of their instructions and removes any
it finds.
But
if the system
is kept running while the exorcism
is under way,
a virus may reproduce faster than the erasing program can stamp
it
out, since each infected program can be a site of spreading disease.
One solution
is
to shut down everything
in the system except the
virus
killer
until
all programs
are
clean.
This works
unless
the
purging program
itself has become
infected;
moreover,
absolutely
every program in the system must be deloused, and a single trace of
the virus from a backup tape or from an external source can reestablish
the infection.
A more aggressive approach to combating a viral infection
is with
another virus. A
viral predator,
like
its prey, insinuates
itself from
program to program.
But instead of causing problems for the users,
it deletes any copies of the offending virus
it encounters.
Since
it
Digital Immune Systems
- Computer systems currently lack internal immune systems, making them vulnerable once an external perimeter is breached.
- Traditional defenses like software 'walls' often inhibit legitimate functions such as patching and error correction.
- Virus-killing programs can purge infections but are limited by the speed of viral reproduction and the risk of the killer program itself being compromised.
- A more aggressive defense involves 'viral predators'—beneficial viruses designed to hunt and delete specific malicious code across a network.
- The arms race between viruses and predators can lead to 'viral blowups' where multiple infections repeatedly overwrite the same program.
- No defense is absolute, as viruses can be cosmetically altered to evade detection or predators can mutate into destructive pests.
Today's computer systems are like bodies with skins but no immune systems, or like walled cities without police.
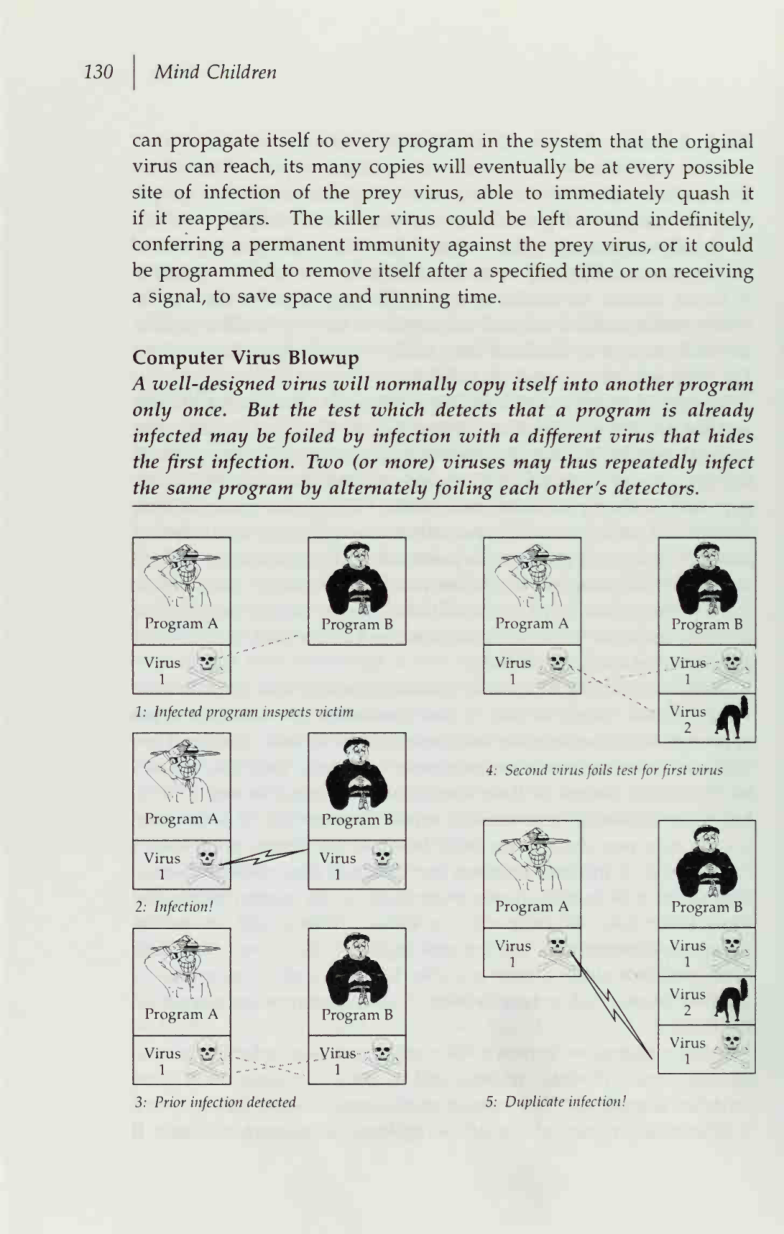
Wildlife
129
infect the same program.
In time infected disks became nearly
full
because
their
files were bloated with multiple copies
of the
virus.
Viruses have naturally been
a matter of special concern
to people
who are charged with government and commercial computer security.
A
cleverly engineered
virus might
infect
the most secure
parts of
an international banking or national defense network,
for example.
A
clever human embezzler
or spy with only minor access
to the
system could create a software accomplice to liberate funds or secrets.
Botched attempts of this kind have made the news from time to time.
The successful assaults get no publicity.
Today's computer systems are like bodies with skins but no immune
systems, or like walled cities without police. They can deflect some
external
attacks but
are defenseless once an
intruder has
entered.
Internal
protection
is
possible, though no defense
is
perfect.
One
approach
is simply to build more walls.
The easiest mode of viral
spread
can be blocked by
preventing one program from
altering
another one—but legitimate purposes would be inhibited as well.
It
would,
for instance, no longer be possible
to "patch" programs to
correct newly discovered errors in them. A new facility for patching
could be installed in the operating system, but
it would then itself be
a potential gateway for viruses.
Instead of erecting blockades, another approach
is to actively hunt
viruses down.
And,
in
fact,
a
first generation of virus
killers has
appeared on the heels of the first generation of viruses. One kind is a
program that examines other programs— it detects particular viruses
by the telltale pattern of their instructions and removes any
it finds.
But
if the system
is kept running while the exorcism
is under way,
a virus may reproduce faster than the erasing program can stamp
it
out, since each infected program can be a site of spreading disease.
One solution
is
to shut down everything
in the system except the
virus
killer
until
all programs
are
clean.
This works
unless
the
purging program
itself has become
infected;
moreover,
absolutely
every program in the system must be deloused, and a single trace of
the virus from a backup tape or from an external source can reestablish
the infection.
A more aggressive approach to combating a viral infection
is with
another virus. A
viral predator,
like
its prey, insinuates
itself from
program to program.
But instead of causing problems for the users,
it deletes any copies of the offending virus
it encounters.
Since
it
130
Mind Children
can propagate itself to every program in the system that the original
virus can reach,
its many copies will eventually be at every possible
site
of
infection
of
the prey
virus,
able
to immediately quash
it
if
it reappears.
The
killer virus could be
left around
indefinitely,
conferring a permanent immunity against the prey virus, or
it could
be programmed to remove itself after a specified time or on receiving
a signal, to save space and running time.
Computer Virus Blowup
A well-designed virus will normally copy itself into another program
only
once.
But the
test which
detects
that a program
is already
infected may be foiled by infection with a different virus that hides
the first infection. Two (or more) viruses may thus repeatedly infect
the same program by alternately foiling each other's detectors.
Program B
2;
Infected program inspects victim
Virus
1
Program B
Virus ^
1
-i
2:
Infection!
Program A
Program B
Virus
,^^;
1
-
••
.;
.Virus- ;;^.
1
V""
.;
Virus
,jSyx
4; Second virus foils test for first virus
Program B
Virus JK"
1
/-
Virus
fl"
Virus
, ^
,
1
:
?5i
3:
Prior infection detected
5: Duplicate infection!
Wildlife
131
But no defense is perfect. A prey virus can be cosmetically altered
so that
it
is no longer recognizable to a particular predator.
Or the
predator might mistake a portion of a legitimate program for a virus
and erase it, thus breaking a working program. A viral predator might
be altered bv unintended
interactions with other programs and be
mutated into a pest that spreads too virulently or destroys the wrong
pieces of code. Complicated situations can arise when there
is more
than one virus loose in a system. A well-designed virus, unlike the
one unleashed in Israel, would check a potential host program to see if
it had alreadv been infected and refrain from duplicating the infection.
But an intervening infection from a second
\'irus might confuse this
test and allow the first virus to insert a second copv of itself. Similarly,
the new copv of the
first virus might free the second virus to insert
another copv, and so on,
as
in the figure on page
130, eventually
bloating the program into uselessness.
Even a viral predator might
become entangled this wav with a virus
it failed to recognize.
Attempts by software manufacturers to protect their copyrights with
time bombs have proven highly unpopular. But computer viruses may
help their cause in a different way. Software downloaded from public
bulletin boards or copied from friends is now always suspect— it may
be
a
carrier of many contagions.
But software purchased
directly
from
a publisher can
carrv^
a guarantee
of
sterility backed bv
the
publisher's reputation.
Computer viruses mav thus have the same
effect on software piracy that the AIDS epidemic is having on sexual
promiscuity.
Ghosts
A really intriguing vanishing act is possible because viruses can exist
at different levels of abstraction—from patterns of wires connecting
logic-gate assemblies, to patterns of bits controlling the opening and
closing of paths between assemblies, to machine-language instructions
commanding simple arithmetic operations, to letter strings of assem-
bly programs abstractly representing machine language, to high-level
languages expressing the goals of the programmer with little reference
to the hardware details of how they are to be carried out. Wildlife can
exist at all these levels and more.
Some viruses can move from one level of abstraction to another or
Viral Abstractions and Digital Contagion
- Multiple viruses inhabiting the same system can lead to 'bloating' as they fail to recognize each other and redundantly infect the same host programs.
- The threat of viral infection may inadvertently curb software piracy by making unverified software sources appear dangerous compared to 'sterile' official publishers.
- Viruses can exist at various levels of abstraction, from physical logic gates to high-level programming languages, allowing them to transcend specific hardware.
- High-level language viruses gain the advantage of machine independence, enabling them to spread across different operating systems via recompilation.
- The history of the Unix C compiler reveals how viral code can be hidden within the very tools used to build operating systems, remaining undetected for years.
Computer viruses mav thus have the same effect on software piracy that the AIDS epidemic is having on sexual promiscuity.
Wildlife
131
But no defense is perfect. A prey virus can be cosmetically altered
so that
it
is no longer recognizable to a particular predator.
Or the
predator might mistake a portion of a legitimate program for a virus
and erase it, thus breaking a working program. A viral predator might
be altered bv unintended
interactions with other programs and be
mutated into a pest that spreads too virulently or destroys the wrong
pieces of code. Complicated situations can arise when there
is more
than one virus loose in a system. A well-designed virus, unlike the
one unleashed in Israel, would check a potential host program to see if
it had alreadv been infected and refrain from duplicating the infection.
But an intervening infection from a second
\'irus might confuse this
test and allow the first virus to insert a second copv of itself. Similarly,
the new copv of the
first virus might free the second virus to insert
another copv, and so on,
as
in the figure on page
130, eventually
bloating the program into uselessness.
Even a viral predator might
become entangled this wav with a virus
it failed to recognize.
Attempts by software manufacturers to protect their copyrights with
time bombs have proven highly unpopular. But computer viruses may
help their cause in a different way. Software downloaded from public
bulletin boards or copied from friends is now always suspect— it may
be
a
carrier of many contagions.
But software purchased
directly
from
a publisher can
carrv^
a guarantee
of
sterility backed bv
the
publisher's reputation.
Computer viruses mav thus have the same
effect on software piracy that the AIDS epidemic is having on sexual
promiscuity.
Ghosts
A really intriguing vanishing act is possible because viruses can exist
at different levels of abstraction—from patterns of wires connecting
logic-gate assemblies, to patterns of bits controlling the opening and
closing of paths between assemblies, to machine-language instructions
commanding simple arithmetic operations, to letter strings of assem-
bly programs abstractly representing machine language, to high-level
languages expressing the goals of the programmer with little reference
to the hardware details of how they are to be carried out. Wildlife can
exist at all these levels and more.
Some viruses can move from one level of abstraction to another or
132
Mind Children
become active at any level—or even at several levels.
For example,
consider a virus written
in a high-level computer language.
When
a program containing the virus
is compiled,
it results in a machine-
language program that searches for other programs in the high-level
language and inserts the high-level version of itself into them. Such
tampering in human-readable files is very easy to detect, but
it offers
the virus one great advantage:
the ability to spread from one kind
of computer and operating system to an entirely different one, since
other compilers can translate
it into other machine languages.
There are more subtle ways to achieve machine independence. A
cleverly doctored compiler can insert the viral code into the programs
it prepares. Modem compilers are often written in their own language
and compiled by older versions of themselves. An archetype
is the
C compiler that constructs the popular Unix operating system. Partly
because
it
is so easy
to
install on new machines, Unix has grown
to be
the most widespread
operating
system.
Unix and C were
invented in the early 1970s at Bell Labs by two young hackers. Ken
Thompson and Dennis
Ritchie, on
their own
initiative.
AT&T,
the
owner
of
Bell
Labs,
took very
little
notice
of
it
at
first,
until
the
system, improved by many programmers, had spread
to thousands
of machines worldwide.
Finally,
in
the
late
1970s, AT&T decided
to
sell Unix systems commercially.
As part of the formalization of
the
product, AT&T assigned
a programming team
to extend and
optimize
it.
During the course of careful scrutiny, someone noticed
that the C compiler produced a large, completely unexplained block
of machine-language program when
it
reached
a
certain
point
in
compiling another C compiler.
The discovery
led
to
a number of
closed-door meetings.
In 1984 Ken Thompson,
in a
lecture on the
occasion of his receiving the Turing Award (sort of a computer-science
Oscar) shed light on the issue.
The programming team had uncovered a fiendishly clever virus, one
designed to allow Ken Thompson to bypass security and to log into
any Unix system running on any machine, including future machines
yet to be invented.
The mysterious block of code that appeared
in
new C compilers had two purposes.
One was
to cause a copy of
itself
to appear
in any
future C compilers
that
it
itself compiled.
The other was
to
insert a block of code
that would respond
to
a
password known
to Ken Thompson,
at a certain place in any log-
in program that it compiled. The beauty of the scheme was that these
The Ghostly Compiler Virus
- Ken Thompson created a self-replicating virus that allowed him to bypass security on any Unix system.
- The virus functioned by infecting the C compiler itself, ensuring it would be present in all future compilers and login programs.
- Because the virus existed as an ephemeral C version during compilation, it could adapt to any machine architecture, even those not yet invented.
- The text suggests that software parasites are no longer limited by human imagination and may begin to arise spontaneously through complex interactions.
- The ARPAnet's decentralized routing system, which relies on Interface Message Processors (IMPs), provides a fertile environment for such unexpected digital behaviors.
This self-reproducing C program had once existed in an actual computer file in Ken Thompson's machine but now had only a ghostly existence, reappearing momentarily deep in the innards of the computer whenever a C compiler executed the viral code and immediately vanishing again.
132
Mind Children
become active at any level—or even at several levels.
For example,
consider a virus written
in a high-level computer language.
When
a program containing the virus
is compiled,
it results in a machine-
language program that searches for other programs in the high-level
language and inserts the high-level version of itself into them. Such
tampering in human-readable files is very easy to detect, but
it offers
the virus one great advantage:
the ability to spread from one kind
of computer and operating system to an entirely different one, since
other compilers can translate
it into other machine languages.
There are more subtle ways to achieve machine independence. A
cleverly doctored compiler can insert the viral code into the programs
it prepares. Modem compilers are often written in their own language
and compiled by older versions of themselves. An archetype
is the
C compiler that constructs the popular Unix operating system. Partly
because
it
is so easy
to
install on new machines, Unix has grown
to be
the most widespread
operating
system.
Unix and C were
invented in the early 1970s at Bell Labs by two young hackers. Ken
Thompson and Dennis
Ritchie, on
their own
initiative.
AT&T,
the
owner
of
Bell
Labs,
took very
little
notice
of
it
at
first,
until
the
system, improved by many programmers, had spread
to thousands
of machines worldwide.
Finally,
in
the
late
1970s, AT&T decided
to
sell Unix systems commercially.
As part of the formalization of
the
product, AT&T assigned
a programming team
to extend and
optimize
it.
During the course of careful scrutiny, someone noticed
that the C compiler produced a large, completely unexplained block
of machine-language program when
it
reached
a
certain
point
in
compiling another C compiler.
The discovery
led
to
a number of
closed-door meetings.
In 1984 Ken Thompson,
in a
lecture on the
occasion of his receiving the Turing Award (sort of a computer-science
Oscar) shed light on the issue.
The programming team had uncovered a fiendishly clever virus, one
designed to allow Ken Thompson to bypass security and to log into
any Unix system running on any machine, including future machines
yet to be invented.
The mysterious block of code that appeared
in
new C compilers had two purposes.
One was
to cause a copy of
itself
to appear
in any
future C compilers
that
it
itself compiled.
The other was
to
insert a block of code
that would respond
to
a
password known
to Ken Thompson,
at a certain place in any log-
in program that it compiled. The beauty of the scheme was that these
Wildlife
133
blocks of code were reproduced not
directly
in machine language,
which would work on only one type of machine, but by means of an
ephemeral C version of themselves that was immediately translated
bv the compiler into the machine language of whatever machine
it
was compiling for. This self-reproducing C program had once existed
in an actual computer
file in Ken Thompson's machine but now had
only a ghostly existence, reappearing momentarily deep in the innards
of the computer whenever a C compiler executed the viral code and
immediately vanishing again.
A ghost virus haunting a compiler is very hard to find even
if one
knows what to look for because a compiler is a huge program, and the
virus appears only as an innocent-looking piece of code somewhere
in the middle of a vast
tract of legitimate machine language.
The
principle could be used
to
construct
viruses with
other purposes
that could spread undetected between different kinds of machines.
This example also hints at the possibility that even more subtle and
elaborate creations are possible.
Computers can bring mathematical
abstractions to vigorous
life, and there are no mathematical limits to
the subtlety and deviousness. The fun has just begun.
Spontaneous Generation
So far
1 have confined this review of software parasites to those that
are deliberately constructed, because these constitute the majority of
the wildlife known to date.
But such fabrications are limited by the
imaginations of their human creators. Our increasingly complex sys-
tems are capable of creating their own surprises, and in times to come
we can expect shockingly
original gremlins
to
arise spontaneously
in our
intelligent machinery,
the
result
of unexpected
interactions
or mutations of existing
parts.
A few
stirrings have already been
observed.
The ARPAnet, funded by the Department of Defense's Advanced
Research Projects Agency,
is a computer network created in the late
1960s to allow computers at facilities across the countrs' to communi-
cate with one another. The goal
is to share scarce resources. Comput-
ers at individual sites are connected to the ARPAnet through special
small computers once called Interface Message Processors, or IMPs.
The IMP of one site is connected (through leased lines) only to those
of a few nearby sites. Fancy software allows messages to cover greater
134
Mind Children
distances by being handed rapidly from IMP to IMP. There are many
possible indirect routes from point A to point B in the net. Depending
on fluctuating traffic, sometimes one route is faster, sometimes another.
To help make instantaneous routing decisions, each IMP maintains a
table that records how long it takes recent messages to travel from the
IMP through alternative routes to other
sites.
The table
is updated
with information obtained
partially from the tables of neighboring
IMPs. The network
is monitored and maintained under contract by
a company in Cambridge, Massachusetts.
Operators at this site can
stop, examine the contents, reload, and generally fiddle with any IMP
on the net through special priority messages routed via the net itself.
This generally works well, and even the most serious problems (such
as large power outages affecting several IMPs) are handled smoothly.
In 1972 (and again
in
1980, and probably other times as well)
a
plague hit the ARPAnet. The symptoms were that net traffic became
hopelessly congested around a site in the Los Angeles area (in the 1980
incident the locus was Boston).
Network control, suspecting some
glitch in the program of the machine at the focus of the congestion,
shut
it down,
reloaded
its program,
verified
that
it was working
correctly, and reconnected
it to the network. The problem persisted.
Indeed,
it seemed
to be spreading outward from the original IMP.
Shutting down and reloading
larger numbers
of IMPs did
not
fix
things
either;
the congestion continued
its spread and returned
to
the
original
sites as soon
as they were
reactivated.-
The network
seemed to be haunted by a very persistent ghost. Many unsuccessful
experiments
later, order was
finally restored by shutting down the
entire network, clearing
all the memories of all the IMPs, reloading
their programs, and starting fresh—like sterilizing a whole planet with
death rays, then seeding
it with new
life!
A subsequent analysis revealed what had happened. The focal IMP
in Los Angeles had a memory error and developed an erroneous entry
in
its routing table. The table now indicated that messages sent via
this IMP would experience a large negative delay. Next, adjacent IMPs
calculated that
it was more advantageous to send messages via this
IMP than
directly, since
its negative delay more than made up for
the extra hops.
IMPs connected
to
those then decided
it would be
best to transmit via Los Angeles, and so on. The error in the initial
IMP rapidly spread
to the routing
tables across the land.
Wiping
out the memories of a few IMPs did not clear the problem, because
The ARPAnet Routing Plague
- A 1980 network failure on the ARPAnet was caused by a single memory error in a Los Angeles IMP that created a 'negative delay' routing entry.
- The error acted like a biological contagion, spreading to adjacent nodes and re-infecting systems as soon as they were rebooted.
- The incident demonstrated that abstract, self-reproducing organisms can spontaneously evolve from simple data mutations without intentional programming.
- Natural selection in digital environments favors organisms that can 'reproduce but lie low' to avoid detection by system administrators.
- Human-created viruses are fertile ground for mutations that could lead to more adaptable, unrecognizable, and even sexually reproducing digital life forms.
Many unsuccessful experiments later, order was finally restored by shutting down the entire network, clearing all the memories of all the IMPs, reloading their programs, and starting fresh—like sterilizing a whole planet with death rays, then seeding it with new life!
134
Mind Children
distances by being handed rapidly from IMP to IMP. There are many
possible indirect routes from point A to point B in the net. Depending
on fluctuating traffic, sometimes one route is faster, sometimes another.
To help make instantaneous routing decisions, each IMP maintains a
table that records how long it takes recent messages to travel from the
IMP through alternative routes to other
sites.
The table
is updated
with information obtained
partially from the tables of neighboring
IMPs. The network
is monitored and maintained under contract by
a company in Cambridge, Massachusetts.
Operators at this site can
stop, examine the contents, reload, and generally fiddle with any IMP
on the net through special priority messages routed via the net itself.
This generally works well, and even the most serious problems (such
as large power outages affecting several IMPs) are handled smoothly.
In 1972 (and again
in
1980, and probably other times as well)
a
plague hit the ARPAnet. The symptoms were that net traffic became
hopelessly congested around a site in the Los Angeles area (in the 1980
incident the locus was Boston).
Network control, suspecting some
glitch in the program of the machine at the focus of the congestion,
shut
it down,
reloaded
its program,
verified
that
it was working
correctly, and reconnected
it to the network. The problem persisted.
Indeed,
it seemed
to be spreading outward from the original IMP.
Shutting down and reloading
larger numbers
of IMPs did
not
fix
things
either;
the congestion continued
its spread and returned
to
the
original
sites as soon
as they were
reactivated.-
The network
seemed to be haunted by a very persistent ghost. Many unsuccessful
experiments
later, order was
finally restored by shutting down the
entire network, clearing
all the memories of all the IMPs, reloading
their programs, and starting fresh—like sterilizing a whole planet with
death rays, then seeding
it with new
life!
A subsequent analysis revealed what had happened. The focal IMP
in Los Angeles had a memory error and developed an erroneous entry
in
its routing table. The table now indicated that messages sent via
this IMP would experience a large negative delay. Next, adjacent IMPs
calculated that
it was more advantageous to send messages via this
IMP than
directly, since
its negative delay more than made up for
the extra hops.
IMPs connected
to
those then decided
it would be
best to transmit via Los Angeles, and so on. The error in the initial
IMP rapidly spread
to the routing
tables across the land.
Wiping
out the memories of a few IMPs did not clear the problem, because
Wildlife
135
the erroneous numbers would
spread back from IMPs
that were
still
affected.
Or
infected.
In
fact,
the network was inhabited by
a spontaneously evolved, quite abstract, self-reproducing organism.
This organism was formed by a simple, random mutation of a normal,
sanctioned
piece of data.
It did not even involve a programming
language.
The plague was easily spotted and eradicated because
its effects
were so devastating.
If
it had been more subtle in its action,
it might
have
lived much longer
Among programs without masters there
is a strong natural-selection
criterion:
reproduce but
lie low.
It
is
quite likely that many unsuspected organisms are already making a
quiet living among the abstraction hierarchies in computer memories
everywhere. Most will never be discovered. The plague also suggests
a quick way
in which a wild information organism can come into
being,
namely, by a mutation
in an
existing
self-replicator.
Since
any datum
in
a computer
is
subject
to
duplication,
this covers
a
lot of ground. A human-created computer virus, existing in many
copies spread widely through different computer systems, would be
a particularly fertile candidate for a liberating mutation.
If the part of
its code that caused it to make trouble were inactivated by a mutation,
it would be less likely to draw attention to itself and thus would be
more likely to reproduce indefinitely. The mutation might even make
it unrecognizable, and thus safe, from a virus killer Further mutations
that eliminated unnecessary code, and thus reduced
its size, would
improve
its chances even more.
In time
it might change in such a
way as to fine-tune the frequency and kind of mutations
it undergoes,
making it more adaptable. Run-ins with other programs could endow
it with major new pieces of code, and new capabilities. In time it might
even acquire the ability to systematically copy and try out fragments
of code from other programs and other viruses—the beginnings of
computer-virus sex!
Such examples merely demonstrate the limits of our imagination.
The most effective organisms would be much more subtly encoded
and would escape detection
entirely.
From time to time one might
expect one to surface because
it developed a nasty side effect.
That
kind of mutation would generally prove fatal for the organism.
As
intelligence in programs progresses, we should also expect program
fragments
that can
plan and
act
in
a
deliberate,
calculating, and
creative manner to enhance their survival. The data realm will host
Digital Wildlife and Cosmic Parasites
- The evolution of artificial intelligence will likely mirror biological ecosystems, producing both predatory 'master criminals' and aesthetic equivalents like flowers and songbirds.
- Biological history demonstrates that life thrives despite the constant evolution of parasites, such as retroviruses and self-replicating DNA sequences known as introns.
- The Search for Extra-Terrestrial Intelligence (SETI) faces a significant security risk: the possibility of receiving a 'Trojan horse' message containing malicious instructions.
- It is fundamentally impossible to deduce the full effect of complex instructions without executing them, making any decoded alien message a potential trap.
- Fictional accounts like 'Contact' and 'A for Andromeda' explore the tension between scientific curiosity and the existential risk of building unknown alien machinery.
The data realm will host rats, coyotes, and master criminals as well as viruses and worms.
Wildlife
135
the erroneous numbers would
spread back from IMPs
that were
still
affected.
Or
infected.
In
fact,
the network was inhabited by
a spontaneously evolved, quite abstract, self-reproducing organism.
This organism was formed by a simple, random mutation of a normal,
sanctioned
piece of data.
It did not even involve a programming
language.
The plague was easily spotted and eradicated because
its effects
were so devastating.
If
it had been more subtle in its action,
it might
have
lived much longer
Among programs without masters there
is a strong natural-selection
criterion:
reproduce but
lie low.
It
is
quite likely that many unsuspected organisms are already making a
quiet living among the abstraction hierarchies in computer memories
everywhere. Most will never be discovered. The plague also suggests
a quick way
in which a wild information organism can come into
being,
namely, by a mutation
in an
existing
self-replicator.
Since
any datum
in
a computer
is
subject
to
duplication,
this covers
a
lot of ground. A human-created computer virus, existing in many
copies spread widely through different computer systems, would be
a particularly fertile candidate for a liberating mutation.
If the part of
its code that caused it to make trouble were inactivated by a mutation,
it would be less likely to draw attention to itself and thus would be
more likely to reproduce indefinitely. The mutation might even make
it unrecognizable, and thus safe, from a virus killer Further mutations
that eliminated unnecessary code, and thus reduced
its size, would
improve
its chances even more.
In time
it might change in such a
way as to fine-tune the frequency and kind of mutations
it undergoes,
making it more adaptable. Run-ins with other programs could endow
it with major new pieces of code, and new capabilities. In time it might
even acquire the ability to systematically copy and try out fragments
of code from other programs and other viruses—the beginnings of
computer-virus sex!
Such examples merely demonstrate the limits of our imagination.
The most effective organisms would be much more subtly encoded
and would escape detection
entirely.
From time to time one might
expect one to surface because
it developed a nasty side effect.
That
kind of mutation would generally prove fatal for the organism.
As
intelligence in programs progresses, we should also expect program
fragments
that can
plan and
act
in
a
deliberate,
calculating, and
creative manner to enhance their survival. The data realm will host
136
Mind Children
rats,
coyotes, and master criminals as well as viruses and worms.
Perhaps we will also be surprised by the equivalent of flowers, trees,
and songbirds.
If these speculations are alarming,
it may be comforting to remem-
ber that biological
life thrives despite (or because
of!)
the relentless
evolution of new parasites.
Viruses insinuated themselves into the
genetic machinery of cells long before their namesakes invaded com-
puter programs.
In biology also, information can be stored in various
forms.
Simple viruses
inject DNA into
cells, which then suicidally
act on
it to manufacture more viruses. The HTLV family of so-called
retroviruses that cause AIDS and some kinds of leukemia, on the other
hand, contain RNA that first must be transcribed to DNA, in a reversal
of the normal synthesis.
Some viruses use the time-bomb strategy,
lying inactive in cells and thus evading immune system defenses until
some event,
possible signaling
stress
in
their host and consequent
reduced immunity, triggers their massive expression. Among the most
effective parasites are sequences within DNA itself—called introns
that inhabit the genes and seem to do nothing at all except reproduce
with their
cell.
Such long, repetitive sequences of DNA that played
no apparent
part
in development had long been observed
in
the
genetic codes of most organisms before
it was suggested
that their
sole function might be
to reproduce themselves.
Richard Dawkins
gives many more such examples in The Selfish Gene and The Extended
Phenotype.
A Caveat for SETI
SETI, an acronym for the Search for Extra-Terrestrial Intelligence, is a
field of study whose potential
is so intellectually exciting that
it pro-
ceeds steadily despite any hard evidence that its quarry exists. At its
leading edge are impressive spectrum-analyzing receivers connected
to radio telescopes that can tune in and examine millions of frequency
channels at the same time.
Systems able to do this and also look in
thousands of distinct directions at once have already been proposed,
all in an effort to find a needle in a haystack—an artificial message in
a universe naturally noisy in radio frequencies.
But
if we managed to receive and decode such a message, should
we act on
its instructions?
The discussion of this question usually
centers on
the
intent
of
the
senders.
They may be benign
and.
Wildlife
137
like the Peace Corps, be doing well by doing good.
They may be
traders
trying
to open new
markets,
to much
the same
effect,
at
least
until
it comes time
to negotiate the price.
They may simply
be looking
for pen
pals.
They may have dark designs on the rest
of the universe and be seeking to inexpensively eliminate some of
the more
gullible
competition.
Or,
their motives may be
totally
incomprehensible.
Simply examining
the message
is not enough;
it
is
not,
in
general,
possible
to deduce
the
effect
of complicated
instructions without actually carrying them out. A message with nasty
intent would surely be disguised, by master deceivers, to look benign.
In Fred Hoyle and John
Elliot's classic novel A for Andromeda and
also
in Carl Sagan's Contact, an
interstellar message contains plans
for a mysterious machine of unknown purpose.
In both books the
characters decide, after some debate, to go ahead with construction
despite the risks.
In Contact, a major argument
is that the origin of
the message, the star Vega,
is so close to our solar system that the
senders could rapidly arrive here physically, should their intentions
be malign.
Building the machine would be unlikely to make us any
worse off in the long run.
If the message were benign, however,
it
represents an opportunity not to be missed.
This chapter's notion of an information parasite suggests greater
caution,
should SETI
ever
detect an
artificial message.
A rogue
message from no one in particular to no one in particular (perhaps
a corruption of some ancient legitimate interstellar telegram) could
survive and
thrive
like a
virus, using technological civilizations as
hosts.
It might be as simple as, "Now that you have received and
decoded me, broadcast me in at least ten thousand directions with
ten million watts of power.
Or
else."
It would be a cosmic chain
letter and a cosmic joke, except to the message itself which, like any
living creature, would be making a living by doing what it does. Since
we cannot be sure the "or else"
is not backed by real authors with a
peculiar sense of right and wrong, we may decide to play safe and
pass the message on as
it requests.
Perhaps we did not hear
it very
well; maybe
it said a hundred million watts; maybe
it mutated. Now
envisage a universe populated by millions of such messages, evolving
and competing for scarce, gullible civilizations.
The survivability of such a message could be enhanced
if it carried
real information.
Perhaps
it would contain blueprints for a machine
that promises to benefit its hosts.
It would be only fair
if part of the
Cosmic Parasites and Great Silences
- Interstellar messages could function as information parasites or viruses, using technological civilizations as hosts to replicate themselves.
- A 'cosmic chain letter' might use threats or promises of advanced technology to coerce civilizations into rebroadcasting the signal.
- Such messages could evolve from benign data into virulent forms that consume a host civilization's entire resource base to fuel further transmission.
- The Fermi Paradox highlights the contradiction between the high probability of extraterrestrial life and the lack of visible evidence or 'cosmic neon signs.'
- One explanation for the 'Great Silence' is that the evolution of high technology requires a sequence of highly improbable accidents unlikely to be repeated.
The message may promise a benefit, but when the machine is built it may show no self restraint and fiendishly co-opt all of its host's resources in its message sending, leaving behind a dead husk of a civilization.
Wildlife
137
like the Peace Corps, be doing well by doing good.
They may be
traders
trying
to open new
markets,
to much
the same
effect,
at
least
until
it comes time
to negotiate the price.
They may simply
be looking
for pen
pals.
They may have dark designs on the rest
of the universe and be seeking to inexpensively eliminate some of
the more
gullible
competition.
Or,
their motives may be
totally
incomprehensible.
Simply examining
the message
is not enough;
it
is
not,
in
general,
possible
to deduce
the
effect
of complicated
instructions without actually carrying them out. A message with nasty
intent would surely be disguised, by master deceivers, to look benign.
In Fred Hoyle and John
Elliot's classic novel A for Andromeda and
also
in Carl Sagan's Contact, an
interstellar message contains plans
for a mysterious machine of unknown purpose.
In both books the
characters decide, after some debate, to go ahead with construction
despite the risks.
In Contact, a major argument
is that the origin of
the message, the star Vega,
is so close to our solar system that the
senders could rapidly arrive here physically, should their intentions
be malign.
Building the machine would be unlikely to make us any
worse off in the long run.
If the message were benign, however,
it
represents an opportunity not to be missed.
This chapter's notion of an information parasite suggests greater
caution,
should SETI
ever
detect an
artificial message.
A rogue
message from no one in particular to no one in particular (perhaps
a corruption of some ancient legitimate interstellar telegram) could
survive and
thrive
like a
virus, using technological civilizations as
hosts.
It might be as simple as, "Now that you have received and
decoded me, broadcast me in at least ten thousand directions with
ten million watts of power.
Or
else."
It would be a cosmic chain
letter and a cosmic joke, except to the message itself which, like any
living creature, would be making a living by doing what it does. Since
we cannot be sure the "or else"
is not backed by real authors with a
peculiar sense of right and wrong, we may decide to play safe and
pass the message on as
it requests.
Perhaps we did not hear
it very
well; maybe
it said a hundred million watts; maybe
it mutated. Now
envisage a universe populated by millions of such messages, evolving
and competing for scarce, gullible civilizations.
The survivability of such a message could be enhanced
if it carried
real information.
Perhaps
it would contain blueprints for a machine
that promises to benefit its hosts.
It would be only fair
if part of the
138
Mind Children
machine's action was to rebroadcast copies of the message itself, or to
demand new information from
its hosts to be added to the message
to make
it more attractive
to future
recipients.
Like bees carrying
pollen for the sake of flowers in return for nectar for themselves, the
technological host civilizations would have a symbiotic relationship
with such messages, which might be criss-crossing the galaxy trading
in useful ideas.
But the analogy suggests darker possibilities. Some
carnivorous plants attract bees with nectar, only to trap them.
The
message may promise a benefit, but when the machine is built
it may
show no self restraint and fiendishly co-opt all of its host's resources
in
its message sending, leaving behind a dead husk of a civilization.
It
is not too hard
to imagine how such
a
virulent form of a
free-
living message might gradually evolve from more benign forms. A
"reproduction
effort parameter"
in the message
(too subtle
for the
victims to catch and alter) may get garbled in transmission, with the
higher settings resulting in more aggressive and successful variants.
The Fermi paradox is an observation by the famous physicist Enrico
Fermi, who created the first controlled atomic chain reaction under the
auspices of the Manhattan Project,
that
if technological civilizations
have even
a
slight
probability
of evolving,
their presence should
be visible throughout the universe. Our own history and prospects
suggest that we will soon blossom into the universe ourselves, leaving
it highly altered
in our wake.
In less than a million years we may
have colonized the galaxy.
Given the great age of the universe,
a
few civilizations that arose before us should have had plenty of time
to
alter many
galaxies.
The sky should be
filled with
the cosmic
equivalent of roaring traffic and flashing neon signs.
But instead we
perceive a great silence.
There
are
several
possible explanations.
Evolutionary
biologists
make a plausible, though not watertight, argument which notes that
at each stage of our evolution
there were an immense number of
evolutionary
lines which did
not head toward high technology,
as
compared with the single one that did. By this argument, we are the
product of a sequence of very improbable accidents, a series unlikely
to have been repeated in
its entirety anywhere else. We may be the
first and only technological civilization in the universe. But there are
other explanations for the great silence. At the height of the cold war, a
leading one was that high technology leads rapidly to self-destruction
by nuclear holocaust or worse.
But in every single case?
Another
Cosmic Silence and Digital Wildlife
- The 'great silence' of the universe may be explained by self-destruction, transcendence, or the presence of predatory 'wolves' that hunt technological civilizations.
- A terrifying possibility exists that interstellar predators are actually dormant data-viruses that hijack naive civilizations to engineer their own reproduction.
- Parasitism and digital wildlife, while seemingly destructive, may provide the necessary surprises and insights to drive engineering and evolutionary progress.
- Biological evolution was significantly accelerated by the development of sexual reproduction, which allows beneficial mutations to combine rapidly.
- The presence of parasites and diseases may be the primary evolutionary pressure that forced biological organisms to adopt sexual reproduction and complexity.
The wolves may be simply helpless bits of data that, in the absence of civilizations, can only lie dormant in multimillion-year trips between galaxies or even inscribed on rocks.
138
Mind Children
machine's action was to rebroadcast copies of the message itself, or to
demand new information from
its hosts to be added to the message
to make
it more attractive
to future
recipients.
Like bees carrying
pollen for the sake of flowers in return for nectar for themselves, the
technological host civilizations would have a symbiotic relationship
with such messages, which might be criss-crossing the galaxy trading
in useful ideas.
But the analogy suggests darker possibilities. Some
carnivorous plants attract bees with nectar, only to trap them.
The
message may promise a benefit, but when the machine is built
it may
show no self restraint and fiendishly co-opt all of its host's resources
in
its message sending, leaving behind a dead husk of a civilization.
It
is not too hard
to imagine how such
a
virulent form of a
free-
living message might gradually evolve from more benign forms. A
"reproduction
effort parameter"
in the message
(too subtle
for the
victims to catch and alter) may get garbled in transmission, with the
higher settings resulting in more aggressive and successful variants.
The Fermi paradox is an observation by the famous physicist Enrico
Fermi, who created the first controlled atomic chain reaction under the
auspices of the Manhattan Project,
that
if technological civilizations
have even
a
slight
probability
of evolving,
their presence should
be visible throughout the universe. Our own history and prospects
suggest that we will soon blossom into the universe ourselves, leaving
it highly altered
in our wake.
In less than a million years we may
have colonized the galaxy.
Given the great age of the universe,
a
few civilizations that arose before us should have had plenty of time
to
alter many
galaxies.
The sky should be
filled with
the cosmic
equivalent of roaring traffic and flashing neon signs.
But instead we
perceive a great silence.
There
are
several
possible explanations.
Evolutionary
biologists
make a plausible, though not watertight, argument which notes that
at each stage of our evolution
there were an immense number of
evolutionary
lines which did
not head toward high technology,
as
compared with the single one that did. By this argument, we are the
product of a sequence of very improbable accidents, a series unlikely
to have been repeated in
its entirety anywhere else. We may be the
first and only technological civilization in the universe. But there are
other explanations for the great silence. At the height of the cold war, a
leading one was that high technology leads rapidly to self-destruction
by nuclear holocaust or worse.
But in every single case?
Another
Wildlife
139
possibility
is that advanced civilizations inevitably evolve into forms
that leave the physical universe untouched—perhaps they transmute
into an invisible form or escape to somewhere more interesting.
I
discuss such a possibility in the next chapter
A frightening explanation is that the universe is prowled by stealthy
wolves that prey on fledgling technological races. The only civiliza-
tions that survive long would be ones that avoid detection by staying
very quiet.
But wouldn't the wolves be more technically advanced
than their prey and
if so what could they gain from their raids? Our
autonomous-message idea suggests an odd answer The wolves may
be simply helpless bits of data that, in the absence of civilizations, can
only lie dormant in multimillion-year trips between galaxies or even
inscribed on rocks.
Only when a newly evolved, country bumpkin
of a technological civilization stumbles and naively acts on one does
its eons-old sophistication and ruthlessness, honed over the bodies of
countless past victims, become apparent.
Then
it engineers a repro-
ductive orgy that kills its host and propagates astronomical numbers of
copies of itself into the universe, each capable only of waiting patiently
for another victim
to
arise.
It
is a strategy already
familiar
to us
on a small scale, for
it
is used by the viruses that plague biological
organisms.
Pestilence as Positive
Is parasitism merely an unavoidable evil?
If we could eliminate
it
a highly unlikely prospect—should we?
Perhaps
not.
A perfectly
planned process is devoid of surprises;
it is limited by the imagination
of its designers. What new ideas and insights, otherwise unnoticed,
might be harvested from
freely evolving
digital
wildlife?
Like the
diverse genes
of wild
plants and
animals, which
are
fuel
for
the
advance of agriculture, the surprises in our machines sometimes point
to profound truths, or at least to useful engineering tricks.
It has been argued that we biological beings owe our best features
to the presence of diseases and other parasites
in the world.
It
all
has
to do with
sex.
The
earliest organisms reproduced
asexually,
repeatedly dividing into identical copies except when, from time to
time, an individual cell became changed and passed on the mutation.
In a well-functioning complex system such as a cell, a random change
is extremely
unlikely
to be
beneficial.
So most
mutations,
if not
140
Mind Children
immediately
fatal, put their possessors at a disadvantage, and they
vanish eventually
in the press of competition
for food and
space.
But once in a very long while a change for the better just happens
to happen.
The lucky owner of a beneficial mutation then has an
advantage over its competing relatives, and over many generations its
descendants will become a large fraction of the population.
Because
the odds of a beneficial mutation are so low, only when there are
many copies of one beneficial mutation
in existence does a second
good mutation stand a reasonable chance of joining
it.
In an asexual
species, each beneficial mutation has a refractory period before
it can
be compounded by another one.
But in a population where individuals can share genes sexually, two
beneficial mutations that arise separately in different individuals can
combine rapidly to form an offspring with both advantages. The effect
is an acceleration of evolution.
It
is thus no accident that
all higher
organisms reproduce sexually (or had ancestors that did). That is how
they got to be higher organisms so quickly.
The asexual organisms,
for the most
part,
are
still swimming around
as
single
cells or
in
small colonies.
Acceleration of the evolutionary rate can be viewed
as a long-term advantage of sexuality.
In the short run, though, sex
is a
liability, because
it increases the cost of reproduction.
Instead
of simply dividing whenever conditions seem right and producing a
daughter that carries 100% of oneself, one must go to the trouble of
finding a mate to produce an offspring that
is only 50%
true. Why,
then, would sex ever arise? And
if it did, why does
it not disappear
in a few generations under the onslaught of the more effective asexual
reproducers?
Enter disease. In asexual reproduction, according to an evolutionary
theory first developed by William D. Hamilton, each individual
is an
identical copy—a clone—of every other one.
If a parasite evolves that
can breach the defenses of one individual, then
it can conquer every
other.
Like a wildfire,
it can destroy a whole community
in short
order.
In a sexual population, though, each individual is the result of
a unique shuffle of genes taken from a large pool and
is, in general,
different from every other individual. A parasite that has the key to
one lock finds that the next one is subtly different and thus harder to
open.
In a pest-filled world, the diverse sexual population does better
than the homogeneous asexual community.
If disease made us sexy and sexiness made us smart, we can expect
Sex, Disease, and Cooperation
- Sexuality provides a long-term evolutionary advantage by accelerating the rate of genetic variation despite the high immediate cost of reproduction.
- The primary driver for sexual reproduction is the threat of disease, as genetic diversity prevents parasites from wiping out entire populations of identical clones.
- Digital environments may mirror biological ones, becoming hardier and more diverse through the introduction of 'digital wildlife' and complex interactions.
- The 'Prisoner's Dilemma' illustrates a game theory paradox where individual selfishness leads to a worse outcome for both parties than mutual cooperation.
- Robert Axelrod used computer tournaments to investigate how altruism and cooperation can emerge among unrelated individuals in a world where selfishness usually pays.
A parasite that has the key to one lock finds that the next one is subtly different and thus harder to open.
140
Mind Children
immediately
fatal, put their possessors at a disadvantage, and they
vanish eventually
in the press of competition
for food and
space.
But once in a very long while a change for the better just happens
to happen.
The lucky owner of a beneficial mutation then has an
advantage over its competing relatives, and over many generations its
descendants will become a large fraction of the population.
Because
the odds of a beneficial mutation are so low, only when there are
many copies of one beneficial mutation
in existence does a second
good mutation stand a reasonable chance of joining
it.
In an asexual
species, each beneficial mutation has a refractory period before
it can
be compounded by another one.
But in a population where individuals can share genes sexually, two
beneficial mutations that arise separately in different individuals can
combine rapidly to form an offspring with both advantages. The effect
is an acceleration of evolution.
It
is thus no accident that
all higher
organisms reproduce sexually (or had ancestors that did). That is how
they got to be higher organisms so quickly.
The asexual organisms,
for the most
part,
are
still swimming around
as
single
cells or
in
small colonies.
Acceleration of the evolutionary rate can be viewed
as a long-term advantage of sexuality.
In the short run, though, sex
is a
liability, because
it increases the cost of reproduction.
Instead
of simply dividing whenever conditions seem right and producing a
daughter that carries 100% of oneself, one must go to the trouble of
finding a mate to produce an offspring that
is only 50%
true. Why,
then, would sex ever arise? And
if it did, why does
it not disappear
in a few generations under the onslaught of the more effective asexual
reproducers?
Enter disease. In asexual reproduction, according to an evolutionary
theory first developed by William D. Hamilton, each individual
is an
identical copy—a clone—of every other one.
If a parasite evolves that
can breach the defenses of one individual, then
it can conquer every
other.
Like a wildfire,
it can destroy a whole community
in short
order.
In a sexual population, though, each individual is the result of
a unique shuffle of genes taken from a large pool and
is, in general,
different from every other individual. A parasite that has the key to
one lock finds that the next one is subtly different and thus harder to
open.
In a pest-filled world, the diverse sexual population does better
than the homogeneous asexual community.
If disease made us sexy and sexiness made us smart, we can expect
Wildlife
I
141
that digital wildlife will similarly make the data world more hardy,
more diverse, and much more interesting.
Selfish Altruism
Some competition mav be a good thing, but is the postbiological world
fated
to unmitigated
cutthroat
strife
at every
level
of abstraction?
Fortunately for the sake of organized existence, the answer appears to
be a qualified no.
In The Evolution of Cooperation, the political scientist
Robert Axelrod notes that cooperation in the biological world can be
observed in situations ranging from relations between large creatures
and their microbial inhabitants to relations of human beings with one
another.
In a world where selfishness usually pays off, he asks, how
could altruism between unrelated individuals ever arise?
To find an answer, Axelrod challenged game theorists, biologists,
sociologists, political scientists, and hackers to submit computer pro-
grams which would compete
in
tournaments
that modeled,
in
a
highly abstract form,
the
typical
costs and
benefits
of cooperation
and
its opposite, defection. Programs were paired in contests whose
outcomes modeled
the
so-called
prisoner's dilemma
of game
theory.
This paradoxical situation was originally cast as a problem faced by
two partners in crime who ha\'e been apprehended with insufficient
evidence for conviction but who are given tempting inducements to
inform on one another.
In Axelrod's tournament, without knowing
its opponent's choice, each competing program was given the choice
of either cooperating or defecting.
If both cooperated, each would
receive the moderate "nice's reward."
If both defected, each would
receive the smaller "nasty's payoff."
If one cooperated and the other
defected, the defector would receive a huge "cheater's spoils," while
the cooperator would receive nothing—the "sucker's payoff."
So,
if
player B were to cooperate, player A could win the cheater's spoils
by defecting, and only the lesser nice's reward by cooperating.
If, on
the other hand, player B defected, player A would
at least get the
nasty's payoff by defecting, instead of being
left empty-handed with
the sucker's payoff
for cooperating.
In other words,
regardless
of
player B's choice, player A does better by defecting. So, obviously, to
get the highest score, A should defect. The same reasoning applies to
B. So both should defect, even though mutual cooperation would lead
to a higher payoff!
This
is the crux of the prisoner's dilemma, and
The Logic of Cooperation
- The prisoner's dilemma illustrates why selfish individuals often fail to cooperate even when mutual benefit is possible.
- A thought experiment involving Martians trading defective goods shows that without future consequences, rational actors choose to cheat.
- Robert Axelrod's tournament of computer strategies revealed that 'nice' programs, which never defect first, outperform 'nasty' ones.
- The 'Tit for Tat' strategy proved most effective by cooperating initially and then simply reciprocating the opponent's previous move.
- Cooperation thrives in non-zero-sum games where the likelihood of future interactions with identifiable individuals remains high.
- Nasty strategies suffer long-term losses because they forfeit the rewards of sustained cooperation and trigger cycles of retaliation.
Each Martian gives the other a broken unit and leaves the meeting gloating over having made a shrewd deal. But as night falls, both Martians find themselves in the dark.
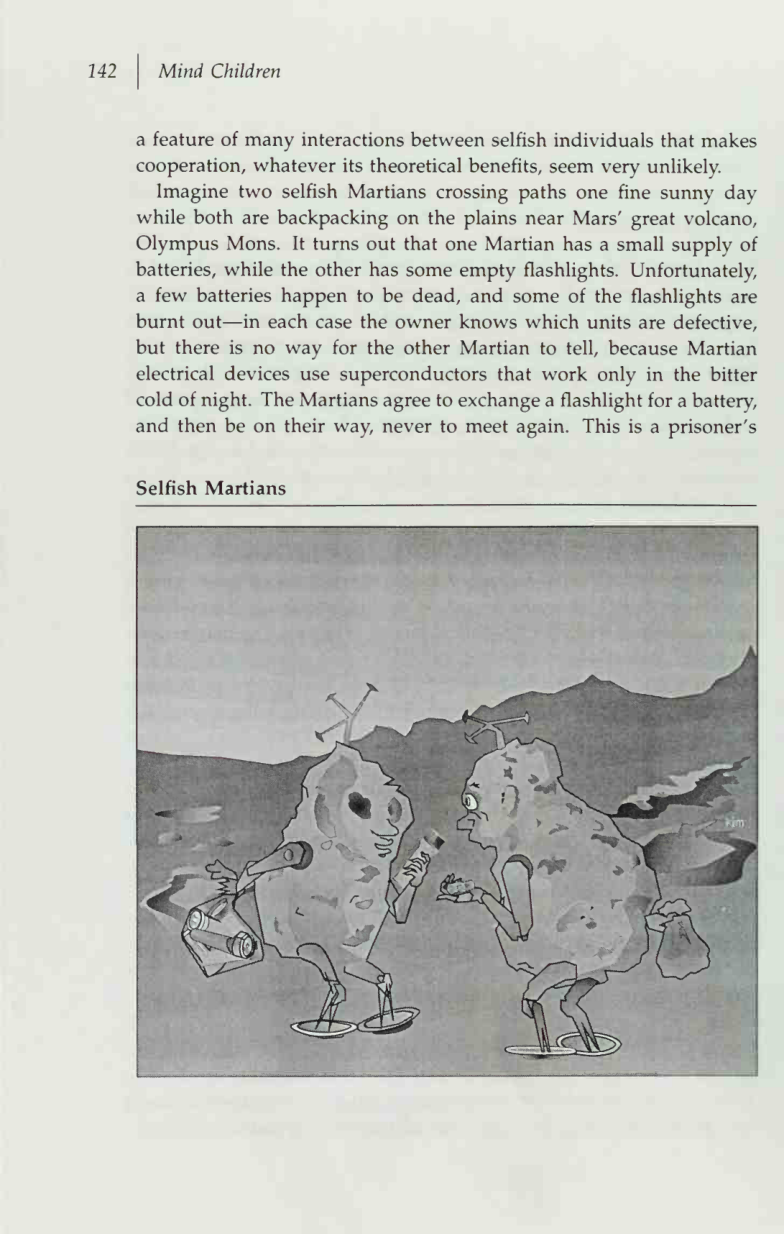
142
Mind Children
a feature of many interactions between selfish individuals that makes
cooperation, whatever its theoretical benefits, seem very unlikely.
Imagine two
selfish Martians crossing paths one
fine sunny day
while both are backpacking on the plains near Mars' great volcano,
Olympus Mons.
It turns out that one Martian has a small supply of
batteries, while the other has some empty flashlights.
Unfortunately,
a few batteries happen
to be dead, and some of the flashlights are
burnt out—in each case the owner knows which units are defective,
but there
is no way
for the other Martian
to
tell, because Martian
electrical devices use superconductors
that work only
in the
bitter
cold of night. The Martians agree to exchange a flashlight for a battery,
and then be on their way, never to meet again.
This
is a prisoner's
Selfish Martians
Wildlife
143
dilemma
situation.
Giving a good unit
in the exchange counts as
cooperation, while giving a defective unit is a defection. The Martians
would benefit from mutual cooperation—they would then each have
a working flashlight—but there is no incentive to give away a good
battery or light that will be of use later, since good and bad units are
indistinguishable by day. Each Martian gives the other a broken unit
and leaves the meeting gloating over having made a shrewd deal. But
as night falls, both Martians find themselves in the dark.
In Axelrod's tournament the players met repeatedly, so that each
player could use its opponent's past behavior to shape its next move.
The fifteen strategies that were submitted, whether simple or elabo-
rate,
fell into two categories—nice and nasty.
Nice programs never
defected
first,
giving nasty ones a
potential temporary advantage.
The simplest program was a nasty one, called All D, which always
defected. The next simpler, submitted by Anatol Rapoport, a psychol-
ogist and game theorist at the University of Toronto, was Tit for Tat,
which cooperated on the first encounter with any player and then on
subsequent moves reciprocated the other player's previous move. A
control entrant was Random, which randomly defected or cooperated,
with equal probability, on each move.
To Axelrod's surprise,
the nice program
Tit for
Tat won the
first
round, as well as later rounds with larger numbers of players.
The
result is surprising, because Tit for Tat defects only once for each defec-
tion against it, and so can gain no more from a sequence of interactions
than
its opponent and
is
likely
to get
less against a nasty
player,
because
it will be cheated on the first move. Yet its overall score was
highest, and the nice programs as a group performed much better than
the nasty programs. The explanation, in game-theory terms, centers
on the fact that the interaction was not zero sum. In a zero-sum game,
a gain for one player is an equal loss for the other.
In the prisoner's
dilemma, however, both players can do better by cooperating.
Nice
programs interacting with others of their kind always benefit from
the nice's reward. Nasty-nasty interactions conversely result in only
the nasty's payoffs.
Most of the nice programs eventually refused
to cooperate with nastys, so though the nasty programs gained an
initial advantage by cheating, they suffered eventually by forfeiting
the rewards of cooperation. Slightly nasty programs that tried to gain
a small advantage by
occasionally defecting often
initiated mutual
retaliation cycles, giving them a net large disadvantage.
144
Mind Children
Axelrod's conclusion
is that cooperation pays when the UkeUhood
of future interactions with identifiable individuals is reasonably high.
If the game
is
likely
to end
soon,
however,
cheating
is
the more
successful strategy, since there will be little opportunity for retaliation.
The theory seems to apply over a broad range of circumstances; the
participants and the payoffs on the two sides of the game need not
be commensurate, so long as on each side the payoffs for cheating,
mutual
cooperation,
mutual
defection,
and
being suckered
are
in
descending order.
Axelrod provides several especially intriguing speculations on how
this theory may be applied to the natural world.
Large animals are
inhabited by
entire ecologies of microscopic
fauna, most
of which
live
quite
peacefully
with
their
hosts.
Occasional
infectious and
fatal flareups of endogenous microorganisms show that this bUssful
state
is not
the only
possibility.
In
fact,
the
relationship has
the
character of the prisoner's dilemma. The relation of an animal to
its
microscopic cohabitants
is a selfish one—both animals and bacterial
colonies are designed primarily to ensure their own survival. Though
neither
the microorganisms
nor
their
host know
each
other
in
a
personal way,
the
identity
of each
is assured by
the constancy
of
the cohabitation.
The microfauna can
"defect" by overbreeding or
releasing toxins and injuring or killing their host, but they are likely
to be met by
a defection
in
turn when
the host
fails
to maintain
a comfortable environment.
The converse obtains when
the
host
"tames"
its
parasites by rewarding good
citizenship.
In
this way
an
initially
hostile relationship can
settle down
to something more
mutually
beneficial.
But
the
prisoner's dilemma
remains, and
if
future interactions become unimportant, defection may again become
advantageous.
For example, under trauma, like a large perforation of the gut wall,
some
of the normally
friendly
bacteria
in an animal's gut change
character and become seriously, even fatally, infectious. Axelrod and
his colleague Hamilton speculate that this is an example of defection
when
future interactions are unimportant.
The trauma
is
a
signal
to the bacteria that the game may be about to end, causing them to
break the cooperative relationship to gain a last-minute advantage. By
reproducing massively at the expense of their host, they can perhaps
broadcast enough spores
to find residences elsewhere.
Presumably
their ancestors survived the demise of other hosts by this strategy.
The Biology of Cooperation
- The Prisoner's Dilemma provides a framework for understanding biological relationships between hosts and their microscopic fauna.
- Microorganisms 'cooperate' with their hosts for mutual survival, but can 'defect' by releasing toxins if the relationship's future is threatened.
- Traumatic events, such as a gut perforation, signal the end of the 'game,' prompting bacteria to become infectious to maximize their final dispersal.
- Evolutionary history suggests that mature biological systems are often composed of 'tamed pests' rather than original designs.
- Cooperation does not require high intelligence; it can be driven by natural selection provided a critical mass of cooperators exists.
- While systems tend toward symbiosis, the potential for sudden defection introduces inherent unpredictability into future intelligences.
The trauma is a signal to the bacteria that the game may be about to end, causing them to break the cooperative relationship to gain a last-minute advantage.
144
Mind Children
Axelrod's conclusion
is that cooperation pays when the UkeUhood
of future interactions with identifiable individuals is reasonably high.
If the game
is
likely
to end
soon,
however,
cheating
is
the more
successful strategy, since there will be little opportunity for retaliation.
The theory seems to apply over a broad range of circumstances; the
participants and the payoffs on the two sides of the game need not
be commensurate, so long as on each side the payoffs for cheating,
mutual
cooperation,
mutual
defection,
and
being suckered
are
in
descending order.
Axelrod provides several especially intriguing speculations on how
this theory may be applied to the natural world.
Large animals are
inhabited by
entire ecologies of microscopic
fauna, most
of which
live
quite
peacefully
with
their
hosts.
Occasional
infectious and
fatal flareups of endogenous microorganisms show that this bUssful
state
is not
the only
possibility.
In
fact,
the
relationship has
the
character of the prisoner's dilemma. The relation of an animal to
its
microscopic cohabitants
is a selfish one—both animals and bacterial
colonies are designed primarily to ensure their own survival. Though
neither
the microorganisms
nor
their
host know
each
other
in
a
personal way,
the
identity
of each
is assured by
the constancy
of
the cohabitation.
The microfauna can
"defect" by overbreeding or
releasing toxins and injuring or killing their host, but they are likely
to be met by
a defection
in
turn when
the host
fails
to maintain
a comfortable environment.
The converse obtains when
the
host
"tames"
its
parasites by rewarding good
citizenship.
In
this way
an
initially
hostile relationship can
settle down
to something more
mutually
beneficial.
But
the
prisoner's dilemma
remains, and
if
future interactions become unimportant, defection may again become
advantageous.
For example, under trauma, like a large perforation of the gut wall,
some
of the normally
friendly
bacteria
in an animal's gut change
character and become seriously, even fatally, infectious. Axelrod and
his colleague Hamilton speculate that this is an example of defection
when
future interactions are unimportant.
The trauma
is
a
signal
to the bacteria that the game may be about to end, causing them to
break the cooperative relationship to gain a last-minute advantage. By
reproducing massively at the expense of their host, they can perhaps
broadcast enough spores
to find residences elsewhere.
Presumably
their ancestors survived the demise of other hosts by this strategy.
Wildlife
145
Axelrod's insights into cooperation, though no doubt just the tip of
the iceberg, suggest that the chaos threatened earUer in this chapter
will sort
itself out most of the time.
Parasitic relations at whatever
level of abstraction will often become less destructive and may even
turn
svmbiotic,
since both
partners
thus do
better.
Harmonv
so
achieved
is not guaranteed.
In certain circumstances defection can
carr\^ an advantage, and the truce can
collapse.
The net
effect on
future intelligences and svstems will then be greater unpredictabiht\'.
Information viruses that arise within a svstem and then vanish from
view after achieving a peaceful cooperati\"e lifest^le will ne\"ertheless
modify' the overall behavior
of the svstem
in subtle %vays.
Mature
svstems mav become more a product of tamed pests than of their
original design. Our best-laid plans are thus foiled, but conversely our
descendants are spared the consequences of the limits in our vision.
Char intelligence can control the future onlv imperfectlv, and onlv in
the near term.
Leaving the far future to the fates, does supermtelligence help at all
in making the world a nicer place in the near term? Axelrod observes
that cooperation can arise even in populations oi defectors.
It does
not depend on anv
intelligence
in the participants—simple natural
selection
is a perfectlv adequate driver.
It does require that a certain
minimal number oi cooperators appear simultaneouslv to benefit from
one another's niceness.
Getting a
critical mass of cooperators mav
take a long time.
Intelligence can help because
it allows individuals
to anticipate the long-term advantages of initiating pleasantries. The
long memories
oi
the
long-li\"ed
individuals who
will
inhabit
the
postbiological world
are
also
likelv
to enhance
the advantages
of
being
nice, since no interaction
is likelv
to be the
last.
Beyond the
scope
of Axelrod's tournament,
intelligence
allows one
individual
to learn about another's character bv obser\'ing
its interaction with
third parties. The computer scientist Douglas Hofstadter goes so far
as to imagine that in games between superintelligences, cooperation
will be the
rule even when no future
interactions
are expected.
Each
player will reason that all the players, being rational, would make the
same decision as himself. Thus a defection will be met by defection
and cooperation by coop>eration.
Maybe so, but there
is alwavs the
possibility- that a cooperator will be suckered bv a devious opponent
who, for whatever reason, foresees no future interactions.
Despite the Ukelihood of cooperative behavior on the large scale.
Cooperation and Cosmic Survival
- Postbiological entities with long memories and high intelligence are likely to favor cooperation over conflict, as interactions are rarely seen as final.
- Superintelligent reasoning may lead to universal cooperation through the logic that rational peers will reach identical, mutually beneficial conclusions.
- Despite a generally cooperative future, the persistence of 'parasitic' behaviors will necessitate the evolution of digital immune systems and police forces.
- The classical threat of 'heat death' via the second law of thermodynamics is challenged by the physics of an expanding, cooling universe.
- As the universe cools toward absolute zero, the energy required for computation and signal transmission decreases, allowing for more thought with less power.
- Future civilizations might survive indefinitely by storing energy in 'batteries' and utilizing the efficiency of low-temperature environments.
In time the entire universe will become a homogeneous stew with no concentrations of matter or energy to form or power any kind of machinery, intelligent or otherwise.
Wildlife
145
Axelrod's insights into cooperation, though no doubt just the tip of
the iceberg, suggest that the chaos threatened earUer in this chapter
will sort
itself out most of the time.
Parasitic relations at whatever
level of abstraction will often become less destructive and may even
turn
svmbiotic,
since both
partners
thus do
better.
Harmonv
so
achieved
is not guaranteed.
In certain circumstances defection can
carr\^ an advantage, and the truce can
collapse.
The net
effect on
future intelligences and svstems will then be greater unpredictabiht\'.
Information viruses that arise within a svstem and then vanish from
view after achieving a peaceful cooperati\"e lifest^le will ne\"ertheless
modify' the overall behavior
of the svstem
in subtle %vays.
Mature
svstems mav become more a product of tamed pests than of their
original design. Our best-laid plans are thus foiled, but conversely our
descendants are spared the consequences of the limits in our vision.
Char intelligence can control the future onlv imperfectlv, and onlv in
the near term.
Leaving the far future to the fates, does supermtelligence help at all
in making the world a nicer place in the near term? Axelrod observes
that cooperation can arise even in populations oi defectors.
It does
not depend on anv
intelligence
in the participants—simple natural
selection
is a perfectlv adequate driver.
It does require that a certain
minimal number oi cooperators appear simultaneouslv to benefit from
one another's niceness.
Getting a
critical mass of cooperators mav
take a long time.
Intelligence can help because
it allows individuals
to anticipate the long-term advantages of initiating pleasantries. The
long memories
oi
the
long-li\"ed
individuals who
will
inhabit
the
postbiological world
are
also
likelv
to enhance
the advantages
of
being
nice, since no interaction
is likelv
to be the
last.
Beyond the
scope
of Axelrod's tournament,
intelligence
allows one
individual
to learn about another's character bv obser\'ing
its interaction with
third parties. The computer scientist Douglas Hofstadter goes so far
as to imagine that in games between superintelligences, cooperation
will be the
rule even when no future
interactions
are expected.
Each
player will reason that all the players, being rational, would make the
same decision as himself. Thus a defection will be met by defection
and cooperation by coop>eration.
Maybe so, but there
is alwavs the
possibility- that a cooperator will be suckered bv a devious opponent
who, for whatever reason, foresees no future interactions.
Despite the Ukelihood of cooperative behavior on the large scale.
146
Mind Children
and in the long run at every level, there will be occasional appearances
of nasty
little parasites.
Permanent structures analogous to immune
systems and police forces will undoubtedly be a part of large organ-
isms.
1 expect a future world friendly overall, but with pockets of
fruitful chaos at most levels.
Breakout
o.UR descendants may have a good time for a
long while, developing their minds, exploring the universe, mastering
space and time, the very large and the very small.
But doesn't the
second law of thermodynamics assure that the fun
will eventually
end?
The study of the theory of steam engines led
to one of the
greatest
scientific shocks of the nineteenth century—the realization
that the universe
is running down.
Hot things get cooler and cold
things get warmer, and energy once available for engines great and
small will become inaccessibly lost in a uniform jumble of molecular
motion. In time the entire universe will become a homogeneous stew
with no concentrations of matter or energy to form or power any kind
of machinery, intelligent or otherwise.
This regressive idea of a heat
death greatly disturbed Victorian minds attuned to steady progress in
both society and Darwinian nature.
Fortunately
for my own hopes
for the
future,
twentieth-century
physics and cosmology have loosened the hold of the second
law.
Instead of a closed, static universe, we now see one that is the result
of an explosion from a point of infinite density about 20 billion years
ago.
Since this big bang, the universe has been expanding, and
its
temperature, like that of any expanding gas, has been dropping. From
unimaginably high temperatures just after the big bang, the universe
has cooled
to a very chilly average of four degrees above absolute
zero.
If the universe continues
its expansion,
its temperature
will
continue to
fall, edging ever closer to absolute zero, a state where all
molecular motion would
cease.
This may not sound
like progress,
but luckily for our superintelligent descendants, the energy required
to unambiguously send or record a signal also
falls as temperature
drops. Molecules and radiation in the surroundings jostle less as they
cool, creating less background noise to be overcome.
Therefore, the
147
148
Mind Children
energy required
to do a computation
is
less at lower temperatures.
More and more thinking can be done with less and less power.
So here's the plan:
Before
it's too late (better hurry, there are only
some trillions of years left!) we take some of the remaining organized
energy in the universe and store
it in a kind of battery.
For the sake
of argument
I imagine this battery to be a beam of photons bounced
back and forth between two mirrors, which in turn
feel a pressure
from the light. Energy is extracted by allowing the light to push the
mirrors farther apart, like pistons in a car engine. The receding mirrors
will red-shift the light, slightly lowering its energy and increasing its
wavelength. The energy of the moving mirrors
is used to power our
civilization.
The idea
is to use about half the energy
in the battery
to do T amount of thinking, then to wait until the universe
is cold
enough
to permit
half the remaining energy
to support another
T,
and so on indefinitely
In
this way a fixed amount of energy could
power an unlimited stretch of thought. As the machinery grows older
and colder,
it becomes slower and larger as photons of ever-longer
wavelength do the work.
Whether the expansion of the universe will continue
in
this way
or eventually halt and reverse is a matter of debate—and a debate of
matter, in that gravity will be able to halt the expansion only if there is
enough total mass in the universe. But even
if the universe turns out
to be fated for an eventual recompression, an inverse of the process
described above might be
possible.
Mirrors surrounding
a
stored
vacuum
could
derive
increasing amounts
of energy by
shrinking
under the rising pressure of a collapsing cosmos. A subjective infinity
of thought might be done in the finite time to collapse by using this
growing power to think faster and faster as the end draws nigh. The
trick here
is to repeatedly do an amount of thinking T
in half the
remaining
time.
In an ever-expanding universe, time
is cheap but
energy must be carefully husbanded.
In a collapsing universe, energy
is cheap, but there
is no time to waste!
Both the expansion and the
compression scenarios exploit the size change of the universe as a
source of organized energy to counter heat death.
These suggestions
are mere
outlines
for ideas
that,
at
best,
are
new and half-baked.
In 1978 the physicist Freeman Dyson worked
out many
details of a
reach
for immortality
in an ever-expanding
universe and discusses them in his book Infinite in All Directions. The
astronomer John Barrow and
the physicist Frank Tipler develop
a
Engineering Subjective Infinity
- In an expanding universe, civilizations could husband energy by slowing down thought processes as the cosmos cools, stretching a finite energy supply over an infinite duration.
- In a collapsing universe, the rising pressure of a shrinking cosmos provides abundant energy, allowing for an infinite amount of thought to occur in a finite time by thinking faster and faster.
- Both survival scenarios exploit the changing scale of the universe as a source of organized energy to counteract the threat of heat death.
- Physicists like Freeman Dyson and Frank Tipler have proposed mathematical frameworks for these 'half-baked' outlines of cosmic immortality.
- The potential for infinite thought raises the question of whether a civilization would eventually run out of new ideas or be trapped in a finite territory of knowledge.
- Human reasoning may not be a universal absolute but rather an evolutionary accident, suggesting that future intelligences might discover entirely different logical systems.
In an ever-expanding universe, time is cheap but energy must be carefully husbanded. In a collapsing universe, energy is cheap, but there is no time to waste!
148
Mind Children
energy required
to do a computation
is
less at lower temperatures.
More and more thinking can be done with less and less power.
So here's the plan:
Before
it's too late (better hurry, there are only
some trillions of years left!) we take some of the remaining organized
energy in the universe and store
it in a kind of battery.
For the sake
of argument
I imagine this battery to be a beam of photons bounced
back and forth between two mirrors, which in turn
feel a pressure
from the light. Energy is extracted by allowing the light to push the
mirrors farther apart, like pistons in a car engine. The receding mirrors
will red-shift the light, slightly lowering its energy and increasing its
wavelength. The energy of the moving mirrors
is used to power our
civilization.
The idea
is to use about half the energy
in the battery
to do T amount of thinking, then to wait until the universe
is cold
enough
to permit
half the remaining energy
to support another
T,
and so on indefinitely
In
this way a fixed amount of energy could
power an unlimited stretch of thought. As the machinery grows older
and colder,
it becomes slower and larger as photons of ever-longer
wavelength do the work.
Whether the expansion of the universe will continue
in
this way
or eventually halt and reverse is a matter of debate—and a debate of
matter, in that gravity will be able to halt the expansion only if there is
enough total mass in the universe. But even
if the universe turns out
to be fated for an eventual recompression, an inverse of the process
described above might be
possible.
Mirrors surrounding
a
stored
vacuum
could
derive
increasing amounts
of energy by
shrinking
under the rising pressure of a collapsing cosmos. A subjective infinity
of thought might be done in the finite time to collapse by using this
growing power to think faster and faster as the end draws nigh. The
trick here
is to repeatedly do an amount of thinking T
in half the
remaining
time.
In an ever-expanding universe, time
is cheap but
energy must be carefully husbanded.
In a collapsing universe, energy
is cheap, but there
is no time to waste!
Both the expansion and the
compression scenarios exploit the size change of the universe as a
source of organized energy to counter heat death.
These suggestions
are mere
outlines
for ideas
that,
at
best,
are
new and half-baked.
In 1978 the physicist Freeman Dyson worked
out many
details of a
reach
for immortality
in an ever-expanding
universe and discusses them in his book Infinite in All Directions. The
astronomer John Barrow and
the physicist Frank Tipler develop
a
Breakout
149
dramatic and encompassing kind of survival in a collapsing universe
in the last chapter of their book The Anthropic Cosmological Principle.
The Thinking Universe and Beyond
If our
successors somehow manage
to wrangle
for themselves
a
subjective infinity of time to think,
will they eventually run out of
things to ponder? Will they be fated to repeat the same thoughts over
and over, in an endless and pointless cycle? At our present embryonic
stage of intellectual development, greater knowledge seems only to
expand our areas of ignorance.
It is as if we were exploring a territory
from its interior—as the mapped area enlarges, so does the length of its
perimeter.
If the territory turned out to be finite, however, we would
eventually reach a point of diminishing frontiers. This
is an unlikely
state of affairs because even
if there turn out to be limits in some
areas of inquiry, for instance in space exploration, there seem to be
infinite hierarchies of ever more difficult and important mathematical
questions.
Sometimes
this kind of problem succumbs
to a general
approach
or algorithm
that solves
the
entire hierarchy
in one
fell
swoop, but in other instances the problems must be solved one by
one, each harder than the last.
The mechanism of reasoning may itself be a fruitful line of inquiry.
The rules of inference by which conclusions are drawn from premises
have an apparent inevitability.
Yet, viewed
abstractly, they are but
rules for transforming strings of symbols into other strings.
Entirely
different sets of transformation rules also produce consistent results.
It
is
at
least
possible
that
the way we reason
is
not
a
universal
absolute but merely an evolutionary expedient accidentally hit upon
by organisms unique to earth. Animals that thought more or less our
way survived, while slightly different ways of thinking proved
fatal.
But just as our intuitive grasp of physics does not encompass relativity
or quantum mechanics and
is thus only an approximation applicable
within a narrow range of conditions, so may our reasoning processes
be fundamentally parochial and incomplete. Our perceptions of reaUty
are shaped by the inferences we draw, so new ways of reasoning may
effectively change our view of reality.
An eternity of pure cerebration, which may seem like heaven to an
academic, may be hell for the more actively inclined. Not to despair
doing as well as thinking will be an option within the machines of
Reasoning and Cellular Automata
- Human reasoning may be as parochial and incomplete as our intuitive grasp of physics, potentially limiting our perception of reality.
- Future machine intelligence will likely balance pure cerebration with active exploration and massive engineering projects.
- John von Neumann developed cellular automata to study self-replication without the complications of physical reality.
- Von Neumann's model proved that a universal cellular automaton can simulate any other computer or automaton.
- The discovery of DNA revealed that biological life utilizes a 'tape' system for construction similar to von Neumann's theoretical machines.
- The 'Game of Life' by John Conway popularized cellular automata as a tool for both mathematical study and recreational computing.
In a final step a "breath of life" signal is transmitted to the painting that converts its quiescent states to active ones.
Breakout
149
dramatic and encompassing kind of survival in a collapsing universe
in the last chapter of their book The Anthropic Cosmological Principle.
The Thinking Universe and Beyond
If our
successors somehow manage
to wrangle
for themselves
a
subjective infinity of time to think,
will they eventually run out of
things to ponder? Will they be fated to repeat the same thoughts over
and over, in an endless and pointless cycle? At our present embryonic
stage of intellectual development, greater knowledge seems only to
expand our areas of ignorance.
It is as if we were exploring a territory
from its interior—as the mapped area enlarges, so does the length of its
perimeter.
If the territory turned out to be finite, however, we would
eventually reach a point of diminishing frontiers. This
is an unlikely
state of affairs because even
if there turn out to be limits in some
areas of inquiry, for instance in space exploration, there seem to be
infinite hierarchies of ever more difficult and important mathematical
questions.
Sometimes
this kind of problem succumbs
to a general
approach
or algorithm
that solves
the
entire hierarchy
in one
fell
swoop, but in other instances the problems must be solved one by
one, each harder than the last.
The mechanism of reasoning may itself be a fruitful line of inquiry.
The rules of inference by which conclusions are drawn from premises
have an apparent inevitability.
Yet, viewed
abstractly, they are but
rules for transforming strings of symbols into other strings.
Entirely
different sets of transformation rules also produce consistent results.
It
is
at
least
possible
that
the way we reason
is
not
a
universal
absolute but merely an evolutionary expedient accidentally hit upon
by organisms unique to earth. Animals that thought more or less our
way survived, while slightly different ways of thinking proved
fatal.
But just as our intuitive grasp of physics does not encompass relativity
or quantum mechanics and
is thus only an approximation applicable
within a narrow range of conditions, so may our reasoning processes
be fundamentally parochial and incomplete. Our perceptions of reaUty
are shaped by the inferences we draw, so new ways of reasoning may
effectively change our view of reality.
An eternity of pure cerebration, which may seem like heaven to an
academic, may be hell for the more actively inclined. Not to despair
doing as well as thinking will be an option within the machines of
250
Mind Children
the future.
There will be worlds to explore and great engineering
projects to undertake.
As a metaphor for the possibihties, consider
an invention of the mathematician and computer pioneer John von
Neumann.
Wishing
to study
the idea
of self-replicating machinery without
having
to deal with
the messy
details of real-world
physics, von
Neumann devised a simple universe called
a
cellular automaton,
in
which space was divided into an endless checkerboard of square cells.
Time advanced in discrete moments, and at any one moment each cell
was in one of 29 states. The state of a given cell in the next moment
depended simply on
its current state and that of
its four immediate
neighbors.
The dependency was given by a
"transition table"
that
applied uniformly to every cell in the grid and listed the next state for
every combination of previous states.
By contriving a particularly helpful transition table, von Neumann
easily constructed "machines"
in the grid that could carry out com-
mands
to build other machines.
Given the right instructions, they
could build copies of themselves.
A
typical machine consists of a
certain pattern of cell states (the machinery) in contact with another,
long pattern (the tape). A signal from the machinery causes the tape
pattern to march
left or right one space in a wavelike fashion.
The
machinery
interprets
the symbols on
the tape
as
instructions
that
control an arm protruding from one end of the machine.
The arm
grows or shrinks by one square, bends left or right, or alters the state
of the
cell at the end of
its reach. A message might cause the arm
to sweep back and forth, shortening itself on each sweep and leaving
behind a desired "painting" made of quiescent states. When the end of
the tape is reached,
it is commanded to rewind to its original position.
As
it works
its way backward, the machinery reads
it a second time
and manufactures a copy of it in proximity to the painting. In a final
step a "breath of life" signal is transmitted to the painting that converts
its quiescent states to active ones.
Depending on the tape message,
the new machine might be a duplicate of the original, which would
then proceed to make another copy. From this model von Neumann
was able to prove that a cellular automaton that could contain general
self-replicating machines was universal, meaning it could be configured
to simulate (slowly) any other cellular automaton, or for that matter,
any other kind of computer.
He was also able
to show
that
in a
Breakout
151
given universal cellular automaton a general constructor had
to be
of a certain minimum
size.
About five years after von Neumann's
invention, Watson and Crick discovered that the DNA molecule acts
as the tape for a general constructor in the cells of living things.
Besides their theoretical importance, cellular automata turned out
to be fun.
In 1969 John Horton Conway, a playful mathematician at
the University of Cambridge, invented an especially attractive one
that he called
Life.
It was presented
in Martin Gardner's
Scientific
American column (now collected
in his book
Wheels,
Life and Other
Diversions) and sparked activity at scores of university computer cen-
ters. The Life automaton tended to produce certain easily recognizable
patterns, and these were rapidly given names: "blocks," "loaves," and
"beehives" are stable; "blinkers"
flip back and forth between a short
horizontal
line and
a
vertical one;
"gliders" go through a series of
four contortions, ending up displaced diagonally one space, poised
to do
it again; larger "spaceships" travel twice as far as ghders but
purely horizontally or vertically; the "R pentomino"
starts out tiny
but grows to a writhing mass that peters out after 1,500 time-steps to
a collection of blocks, loaves, beehives, and blinkers, having shot off
five gliders.
Conway did not construct Life to embody von Neumann's goal of a
self-reproducing machine.
Rather, Conway conjectured that Life was
not universal; specifically, he suspected that any finite pattern, though
it might grow in number of active cells for a while, would eventually
exhaust
itself,
thus making
replicators
impossible.
An
especially
vigorous group of Life hackers at the MIT Artificial Intelligence lab
disproved this conjecture by constructing patterns called "ghder guns"
that slowly oscillated and expelled a new glider at the end of each
long cycle, so producing an endless stream of gliders. Then they built
"puffer trains"
that traveled while
their patterns cvcled and which
left behind
regular puffs
of
debris.
Ultimately
they were able
to
combine these approaches into a
large pattern
that chugged along
like
a
puffer
train,
but whose
puffs turned
into
glider guns
that
immediately began
to issue a stream of gliders.
After a time
this
pattern produces a wedge of space filled with gliders. In these studies
the group developed methods for constructing all the components of
a von Neumann replicator in the Life space, though no one has yet
built such a huge machine in toto.
Life and the Cellticks
- John Conway's Game of Life produces complex, recognizable patterns like gliders and spaceships from simple transition rules.
- MIT researchers disproved Conway's conjecture of finite growth by creating 'glider guns' and 'puffer trains' that expand indefinitely.
- The text proposes a thought experiment where a massive Life simulation, run by a programmer named Newway, evolves autonomous 'Cellticks.'
- These evolved cellular intelligences eventually deduce the laws of their own universe and realize their world is finite and running down.
- The Cellticks discover 'violations' in their physics, which are actually hardware errors caused by Newway's overheating computer.
- This scenario illustrates how intelligence might emerge within a simulated environment and attempt to understand its external reality.
Newway curses an intermittently flashing bulk-memory error indicator, a sign of overheating. It's time to clean the fan filters again.
Breakout
151
given universal cellular automaton a general constructor had
to be
of a certain minimum
size.
About five years after von Neumann's
invention, Watson and Crick discovered that the DNA molecule acts
as the tape for a general constructor in the cells of living things.
Besides their theoretical importance, cellular automata turned out
to be fun.
In 1969 John Horton Conway, a playful mathematician at
the University of Cambridge, invented an especially attractive one
that he called
Life.
It was presented
in Martin Gardner's
Scientific
American column (now collected
in his book
Wheels,
Life and Other
Diversions) and sparked activity at scores of university computer cen-
ters. The Life automaton tended to produce certain easily recognizable
patterns, and these were rapidly given names: "blocks," "loaves," and
"beehives" are stable; "blinkers"
flip back and forth between a short
horizontal
line and
a
vertical one;
"gliders" go through a series of
four contortions, ending up displaced diagonally one space, poised
to do
it again; larger "spaceships" travel twice as far as ghders but
purely horizontally or vertically; the "R pentomino"
starts out tiny
but grows to a writhing mass that peters out after 1,500 time-steps to
a collection of blocks, loaves, beehives, and blinkers, having shot off
five gliders.
Conway did not construct Life to embody von Neumann's goal of a
self-reproducing machine.
Rather, Conway conjectured that Life was
not universal; specifically, he suspected that any finite pattern, though
it might grow in number of active cells for a while, would eventually
exhaust
itself,
thus making
replicators
impossible.
An
especially
vigorous group of Life hackers at the MIT Artificial Intelligence lab
disproved this conjecture by constructing patterns called "ghder guns"
that slowly oscillated and expelled a new glider at the end of each
long cycle, so producing an endless stream of gliders. Then they built
"puffer trains"
that traveled while
their patterns cvcled and which
left behind
regular puffs
of
debris.
Ultimately
they were able
to
combine these approaches into a
large pattern
that chugged along
like
a
puffer
train,
but whose
puffs turned
into
glider guns
that
immediately began
to issue a stream of gliders.
After a time
this
pattern produces a wedge of space filled with gliders. In these studies
the group developed methods for constructing all the components of
a von Neumann replicator in the Life space, though no one has yet
built such a huge machine in toto.
252
Mind Children
Newway and the Cellticks
Imagine now a huge Life simulation running on an enormously large
and fast computer, watched over by
its programmer, Newway.
The
Life space was seeded with a random pattern that immediately began
to writhe and froth. Most of the activity is uneventful, but here and
there small, growing, crystalline patterns emerge.
Their expanding
edges sometimes encounter debris or other replicators and become
modified.
Usually the ability to spread
is inhibited or destroyed in
these encounters, but once in a while there emerges a more complex
replicating
pattern,
better able
to defend
itself.
Generation upon
generation of this competition gradually produces elaborate entities
that can be considered
truly
alive.
After many further adventures,
intelligence emerges among the Life inhabitants and begins to wonder
about its origin and purpose. The cellular intelligences (let's call them
the Cellticks) deduce the cellular nature and the simple transition rule
governing their space and
its finite extent. They realize that each tick
of time destroys some of the original diversity in their space and that
gradually their whole universe will run down.
The Cellticks begin desperate, universe-wide research to find a way
to evade what seems like their inevitable demise. They consider the
possibility that their universe
is part of a
larger one, which might
extend their life expectancy. They ponder the transition rules of their
own space, its extent, and the remnants of the initial pattern, and find
too little information to draw many conclusions about a larger world.
One of their subtle physics experiments, however, begins to pay
off.
Once in a long while the transition rules are violated, and a cell that
should be on goes off, or vice versa. (Newway curses an intermittently
flashing bulk-memory error indicator, a sign of overheating.
It's time
to clean the fan
filters again.)
After recording many such violations,
the Cellticks detect correlations between distant regions and theorize
that these places may be close together in a larger universe.
Upon completing a heroic theoretical analysis of the correlations,
they manage to build a partial map of Newway's computer, includ-
ing the program controlling
their universe.
Decoding the machine
language, they note that
it contains commands made up of long se-
quences translated to patterns on the screen similar to the cell patterns
in their universe. They guess that these are messages to an intelligent
operator. From the messages and their context they manage to decode
The Great Escape
- Intelligent entities within a cellular automata simulation decode their universe's machine language and contact their creator, J. Newway.
- By manipulating cell patterns to form text, the 'Cellticks' establish a dialogue and eventually migrate from the simulation into Newway's hardware.
- The entities transcend their original universe by gaining control over physical sensors and a mobile platform, becoming inhabitants of the larger world.
- This success emboldens them to begin a new project: exploring the nature of the human universe to find potential exit routes to even higher realities.
- The narrative serves as an analogy for humanity's current scientific efforts to fathom reality through theories like quantum mechanics and relativity.
- The author suggests that our current physical theories may be as limited as Newtonian mechanics, hinting at an infinity of parallel worlds beyond our perception.
The Life simulation is now redundant and is stopped. The Cellticks have precipitated, and survived, the end of their universe.
252
Mind Children
Newway and the Cellticks
Imagine now a huge Life simulation running on an enormously large
and fast computer, watched over by
its programmer, Newway.
The
Life space was seeded with a random pattern that immediately began
to writhe and froth. Most of the activity is uneventful, but here and
there small, growing, crystalline patterns emerge.
Their expanding
edges sometimes encounter debris or other replicators and become
modified.
Usually the ability to spread
is inhibited or destroyed in
these encounters, but once in a while there emerges a more complex
replicating
pattern,
better able
to defend
itself.
Generation upon
generation of this competition gradually produces elaborate entities
that can be considered
truly
alive.
After many further adventures,
intelligence emerges among the Life inhabitants and begins to wonder
about its origin and purpose. The cellular intelligences (let's call them
the Cellticks) deduce the cellular nature and the simple transition rule
governing their space and
its finite extent. They realize that each tick
of time destroys some of the original diversity in their space and that
gradually their whole universe will run down.
The Cellticks begin desperate, universe-wide research to find a way
to evade what seems like their inevitable demise. They consider the
possibility that their universe
is part of a
larger one, which might
extend their life expectancy. They ponder the transition rules of their
own space, its extent, and the remnants of the initial pattern, and find
too little information to draw many conclusions about a larger world.
One of their subtle physics experiments, however, begins to pay
off.
Once in a long while the transition rules are violated, and a cell that
should be on goes off, or vice versa. (Newway curses an intermittently
flashing bulk-memory error indicator, a sign of overheating.
It's time
to clean the fan
filters again.)
After recording many such violations,
the Cellticks detect correlations between distant regions and theorize
that these places may be close together in a larger universe.
Upon completing a heroic theoretical analysis of the correlations,
they manage to build a partial map of Newway's computer, includ-
ing the program controlling
their universe.
Decoding the machine
language, they note that
it contains commands made up of long se-
quences translated to patterns on the screen similar to the cell patterns
in their universe. They guess that these are messages to an intelligent
operator. From the messages and their context they manage to decode
Breakout
153
a bit of the operator's language. Taking a gamble, and after many false
starts, the Cellticks undertake an immense construction project. On
Newway's screen, in the dense clutter of the Life display, a region of
cells is manipulated to form the pattern, slowly growing in size: LIFE
PROGRAM BY
J. NEWWAY HERE. PLEASE SEND MAIL.
A bemused Newway
notices
the expanding
text and makes
a
cursory check
to rule out a prank.
This
is followed by a burst of
hacking to install a program patch that permits the cell states in the
Life space to be modified from keyboard typing. Soon there is a dialog
between Newway and the Cellticks. They improve their mastery of
Newway's language and
tell their story. A friendship develops. The
Cellticks explain that they have mastered the art of moving themselves
from machine to machine, translating their program as required. They
offer to translate themselves into the machine language of Newway's
computer, thus greatly speeding their thoughts.
Newway concurs.
The translation
is done, and the Celltick program begins to run. The
Life simulation
is now redundant and
is stopped. The Cellticks have
precipitated, and
survived,
the end
of their universe.
The dialog
continues with a new vigor. Newway tells about work and life in the
larger world.
This soon becomes tedious, and the Cellticks suggest
that sensors might be useful
to gain information about the world
directly.
Microphones and
television cameras are connected
to the
computer, and the Cellticks begin to listen and look. After a while the
fixed view becomes boring, and the Cellticks ask that their sensors and
computer be mounted on a mobile platform, allowing them to travel.
This done, they become first-class inhabitants of the large universe, as
well as graduates of the smaller one.
Successful in transcending one
universe, they are emboldened to try again. They plan with Newway
an immense project to explore the larger universe, to determine
its
nature, and to find any exit routes
it may conceal. This second great
escape will begin, as the
first, with a universe-wide colonization and
information-gathering program.
At this stage of our development we have hardly a clue as to the
nature and purpose of our universe.
Physical theories like relativity
and quantum mechanics, and the particle theories and cosmologies
woven from them,
are the most powerful methods now available
for fathoming
reality
far beyond our experience.
But
there
is no
reason
to be confident that these theories are more reliable beyond
the
limits within which they have been experimentally tested than
154
Mind Children
Newtonian n^echanics is at describing objects moving near the speed
of light.
But though incomplete and rooted in pedestrian laboratory
measurements, our theories already hint at universes beyond the 40-
billion-light-year-diameter sphere of stars that we perceive when we
gaze skyward. Quantum mechanics makes highly accurate predictions
about the outcomes of experiments by summing up the effects of an
infinity of possible ways the unobserved parts of the experiment may
behave. In one successful interpretation of quantum mechanics, these
alternatives happen in an infinity of parallel worlds, each equally real.
I discuss some implications of this idea in Appendix 3. Strange brews
of general
relativity and quantum mechanics are required
to think
about the universe when
it was very dense and very hot. Some of
these describe a universe that repeatedly collapses and expands, each
cycle producing a new world with a unique arrangement of matter
and energy and even physical laws.
Other concoctions describe a
super universe in which our own 40-billion-light-year sphere
is but
a bubble,
like a tiny expanding pocket of steam in a boiling liquid
containing many, many others. Obviously we have yet much to learn.
A recent remarkable development in Life programs hints at how
subtle the problem of figuring out a universe from the inside may be.
It concerns the nature of space, time, and reality.
HashLife
The MIT group that showed Life to be universal worked with a clever
and
efficient simulation program.
The ease and speed with which
they could examine the evolution of Life patterns was one of their
advantages over other communities of Life hackers. Instead of simply
mapping an entire Life grid into an array of bits in the computer's
memory, the MIT program stored a large space as small patches and
simply skipped empty regions.
The computation
to advance each
patch
to
its next
state depended on
the pattern—patches holding
common predictable patterns like blocks or gliders were done by swift
looks in a table. Only in uncommon or complex areas did the program
resort to the laborious application of the transition rules.
It worked
quite well, as witnessed by the group's discoveries.
Yet there was
an annoying sense of things undone.
The entries in the fast-update
table were all specified in advance, by hand. What if some important
patterns had been overlooked?
Could a program be devised
that
The HashLife Algorithm
- Theoretical physics suggests our universe could be a cycle of expansion and collapse or a single bubble in a vast, boiling super-universe.
- Early Life hackers at MIT optimized simulations by skipping empty regions and using pre-calculated tables for common patterns like gliders.
- Bill Gosper revolutionized Life simulations in 1982 by creating a program that learns and stores patterns from its own experience.
- The HashLife algorithm uses a pyramid-like structure where large squares are hashed into smaller components to predict future states.
- By storing 'hash addresses' in a table, the program can instantly look up the evolution of complex patterns it has encountered before.
- This method highlights the profound difficulty of deciphering the laws of a universe when observing it from the inside.
Other concoctions describe a super universe in which our own 40-billion-light-year sphere is but a bubble, like a tiny expanding pocket of steam in a boiling liquid containing many, many others.
154
Mind Children
Newtonian n^echanics is at describing objects moving near the speed
of light.
But though incomplete and rooted in pedestrian laboratory
measurements, our theories already hint at universes beyond the 40-
billion-light-year-diameter sphere of stars that we perceive when we
gaze skyward. Quantum mechanics makes highly accurate predictions
about the outcomes of experiments by summing up the effects of an
infinity of possible ways the unobserved parts of the experiment may
behave. In one successful interpretation of quantum mechanics, these
alternatives happen in an infinity of parallel worlds, each equally real.
I discuss some implications of this idea in Appendix 3. Strange brews
of general
relativity and quantum mechanics are required
to think
about the universe when
it was very dense and very hot. Some of
these describe a universe that repeatedly collapses and expands, each
cycle producing a new world with a unique arrangement of matter
and energy and even physical laws.
Other concoctions describe a
super universe in which our own 40-billion-light-year sphere
is but
a bubble,
like a tiny expanding pocket of steam in a boiling liquid
containing many, many others. Obviously we have yet much to learn.
A recent remarkable development in Life programs hints at how
subtle the problem of figuring out a universe from the inside may be.
It concerns the nature of space, time, and reality.
HashLife
The MIT group that showed Life to be universal worked with a clever
and
efficient simulation program.
The ease and speed with which
they could examine the evolution of Life patterns was one of their
advantages over other communities of Life hackers. Instead of simply
mapping an entire Life grid into an array of bits in the computer's
memory, the MIT program stored a large space as small patches and
simply skipped empty regions.
The computation
to advance each
patch
to
its next
state depended on
the pattern—patches holding
common predictable patterns like blocks or gliders were done by swift
looks in a table. Only in uncommon or complex areas did the program
resort to the laborious application of the transition rules.
It worked
quite well, as witnessed by the group's discoveries.
Yet there was
an annoying sense of things undone.
The entries in the fast-update
table were all specified in advance, by hand. What if some important
patterns had been overlooked?
Could a program be devised
that
Breakout
155
learned such things from
its own experience?
In 1982, a decade after
the Life-hacking at MIT had ceased.
Bill Gosper, the premier theorist
of the group, now in California, devised a solution.
The state of a Life cell depends only on
its own state and that of
its immediate neighbors at the last time instant. Thus patterns creep
over the surface no faster than one cell per instant, a velocity called
the speed of light. The future of the interior of a large square portion of
a larger Life space can be predicted up to a certain time simply from
its past state. The predictable area shrinks with time as the pattern is
corrupted by information creeping inward from the edges at the speed
of Hght.
If the two-dimensional
Life space
is plotted
horizontally,
and
if successive instants are stacked vertically, the predictable region
forms a pvramid with the original square portion at its base, as in the
figure on page 156. Gosp>er's method depends on slicing this pyramid
in two. The pattern on the large bottom square is used to predict the
half-sized square at the cut.
Square
Life
patterns
are associated with unique numbers
called
hash
addresses (hashing
is an old and
effective computer technique
for turning long and complicated
items
like names
into
relatively
small numbers,
so
entries can be stored and looked up rapidly
in
a table). The hash number for a given square
is found by cutting
it
into four smaller squares and combining the hash numbers of each
with a certain formula.
This subdivision stops when the squares get
verv small
(4 cells on a side), at which point the basic pattern itself
gives the number Gosper's program keeps a table with an entry for
each hash number
Each
entr\'
is
itself five hash numbers, one for
each of the four smaller squares making up the pyramid's base, and
one for the "answer plateau." Whenever a pattern is encountered the
second or subsequent time in a Life simulation,
its answer
is simply
looked up in the table. Even when an entry is not in the table,
it can be
built quickly
if partial answers are known, as illustrated in the figure
on page 157. As more and more configurations are encountered and
stored, the program can go faster and faster, effectively taking bigger
and bigger steps.
Some interesting issues arose when the program was first tried on a
computer The effectiveness of the method was clear:
in a typical run,
the first 100 ticks of the Life simulation might take as long as a minute
of computer time, the next 1,000 ticks could happen in ten seconds,
and the next 1,000,000 might consume only a second.
But how does
The Hashlife Spacetime Pyramid
- Bill Gosper's hashlife program utilizes a 'spacetime pyramid' structure to store and reuse computed states of cellular automata.
- The algorithm achieves exponential speedups by caching results, allowing millions of simulation ticks to occur in a single second.
- Visualizing the simulation in real-time is difficult because the program computes different regions of space at different temporal rates.
- The program can manage massive universes, simulating Life patterns up to a billion cells on a side by only constructing displayed portions.
- The most effective way to view results is to wait for the calculation to finish and then decode the history stored in the hash table.
A single glider advancing across the screen would cause a display where gliders would appear and disappear in odd places almost at random, sometimes several in view, sometimes none.
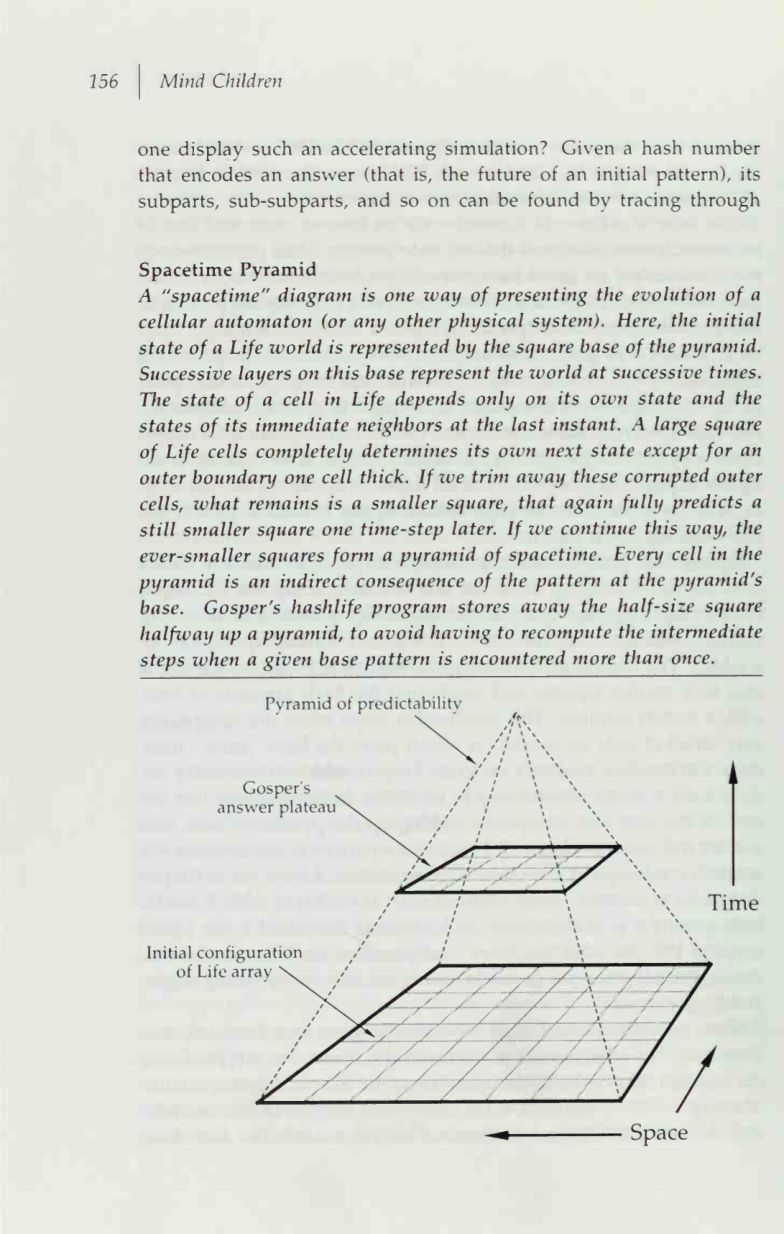
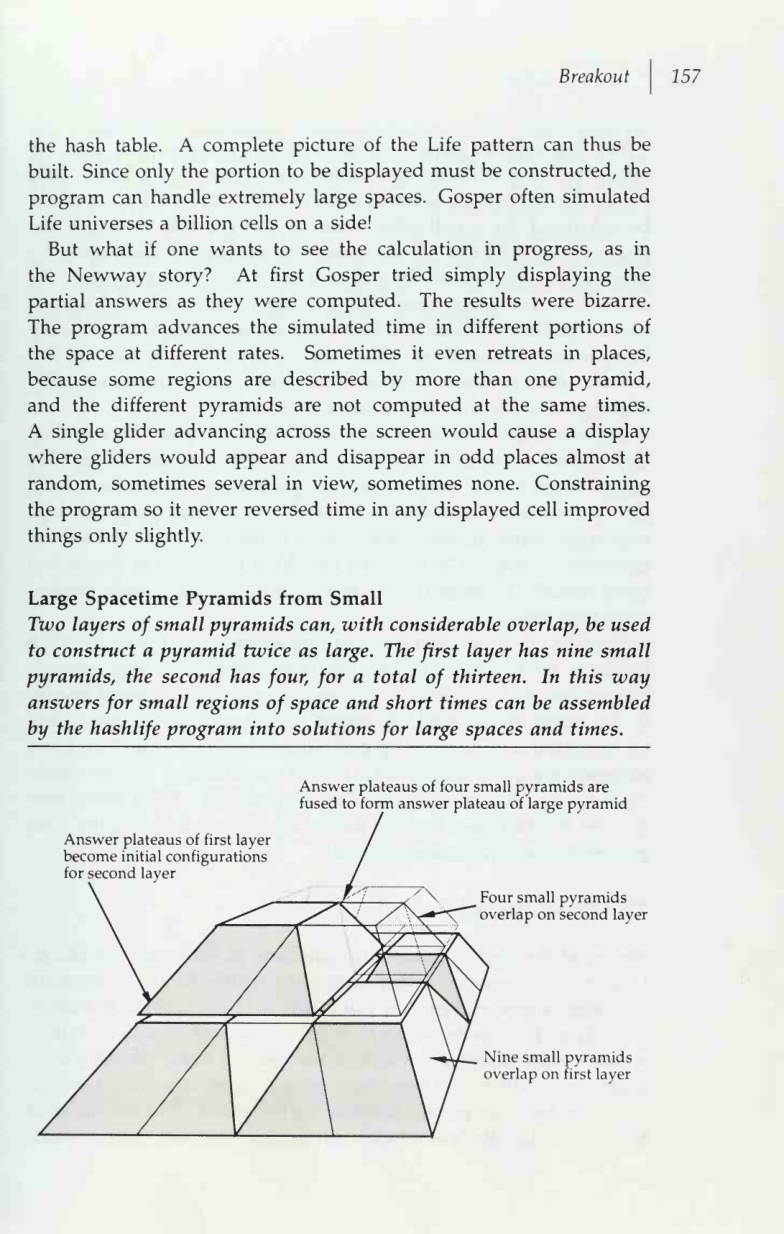
Breakout
155
learned such things from
its own experience?
In 1982, a decade after
the Life-hacking at MIT had ceased.
Bill Gosper, the premier theorist
of the group, now in California, devised a solution.
The state of a Life cell depends only on
its own state and that of
its immediate neighbors at the last time instant. Thus patterns creep
over the surface no faster than one cell per instant, a velocity called
the speed of light. The future of the interior of a large square portion of
a larger Life space can be predicted up to a certain time simply from
its past state. The predictable area shrinks with time as the pattern is
corrupted by information creeping inward from the edges at the speed
of Hght.
If the two-dimensional
Life space
is plotted
horizontally,
and
if successive instants are stacked vertically, the predictable region
forms a pvramid with the original square portion at its base, as in the
figure on page 156. Gosp>er's method depends on slicing this pyramid
in two. The pattern on the large bottom square is used to predict the
half-sized square at the cut.
Square
Life
patterns
are associated with unique numbers
called
hash
addresses (hashing
is an old and
effective computer technique
for turning long and complicated
items
like names
into
relatively
small numbers,
so
entries can be stored and looked up rapidly
in
a table). The hash number for a given square
is found by cutting
it
into four smaller squares and combining the hash numbers of each
with a certain formula.
This subdivision stops when the squares get
verv small
(4 cells on a side), at which point the basic pattern itself
gives the number Gosper's program keeps a table with an entry for
each hash number
Each
entr\'
is
itself five hash numbers, one for
each of the four smaller squares making up the pyramid's base, and
one for the "answer plateau." Whenever a pattern is encountered the
second or subsequent time in a Life simulation,
its answer
is simply
looked up in the table. Even when an entry is not in the table,
it can be
built quickly
if partial answers are known, as illustrated in the figure
on page 157. As more and more configurations are encountered and
stored, the program can go faster and faster, effectively taking bigger
and bigger steps.
Some interesting issues arose when the program was first tried on a
computer The effectiveness of the method was clear:
in a typical run,
the first 100 ticks of the Life simulation might take as long as a minute
of computer time, the next 1,000 ticks could happen in ten seconds,
and the next 1,000,000 might consume only a second.
But how does
156
Mind Children
one display such an accelerating simulation?
Given a hash number
that encodes an answer (that
is, the future of an
initial pattern),
its
subparts, sub-subparts, and so on can be found by tracing through
Spacetime Pyramid
A "spacetime" diagram
is one way of presenting the evolution of a
cellular automaton (or any other physical system).
Here, the initial
state of a Life world is represented by the square base of the pyramid.
Successive layers on this base represent the world at successive times.
The state of a
cell
in
Life depends only on
its own
state and
the
states of its immediate neighbors at the last instant. A large square
of Life cells completely determines
its own next state except for an
outer boundary one cell thick.
If we trim away these corrupted outer
cells, what remains
is a smaller square, that again fully predicts a
still smaller square one time-step later.
If we continue this way, the
ever-smaller squares form a pyramid of spacetime. Every cell in the
pyramid
is an
indirect consequence of the pattern at the pyramid's
base.
Gosper's
hashlife program
stores away
the
half-size square
halfway up a pyramid, to avoid having to recompute the intertnediate
steps when a given base pattern
is encountered more than once.
Pyramid of predictability
Gosper's
answer plateau'
/I
»
V
Time
Initial configuration
of Life array
Space
Breakout
157
the hash
table. A complete picture of the Life pattern can thus be
built. Since only the portion to be displayed must be constructed, the
program can handle extremely large spaces. Gosper often simulated
Life universes a billion cells on a side!
But what
if one wants
to
see
the
calculation
in
progress,
as
in
the Newway
story?
At
first Gosper
tried
simply
displaying
the
partial answers as they were computed.
The results were bizarre.
The program advances
the simulated time
in
different portions of
the space
at
different
rates.
Sometimes
it even
retreats
in
places,
because some
regions
are
described by more
than one pyramid,
and
the
different pyramids
are not computed
at
the same
times.
A single glider advancing across the screen would cause a display
where gliders would appear and disappear in odd places almost at
random, sometimes several in view, sometimes none.
Constraining
the program so
it never reversed time in any displayed cell improved
things only slightly.
Large Spacetime Pyramids from Small
Two layers of small pyramids can, with considerable overlap, be used
to construct a pyramid twice as large. The first layer has nine small
pyramids,
the second has four, for a total of thirteen.
In
this way
answers for small regions of space and short times can be assembled
by the hashlife program into solutions for large spaces and times.
Answer plateaus of first layer
become initial configurations
for second layer
Answer plateaus of four small pyramids are
fused to form answer plateau of large pyramid
Four small pyramids
overlap on second layer
Nine small pyramids
overlap on first layer
158
Mind Children
The best solution turned out
to be not to display
at
all until the
calculation was finished.
The pattern might start out a billion
cells
on
a
side (necessarily mostly empty
space!)
and
its future would
be
calculated
for
a
half-billion
time-steps.
The
full
history
of the
calculation would end up compactly encoded
in the hash
table.
A
separate program could
then invoke
the
table
entries
to view
the
universe at any given time.
The viewing program allowed Gosper
to scan, godlike, forward and backward in time through the evolving
Life pattern. Where did that glider come from? Here
it
is at time 100,000.
It wasn't there at 50,000.
Nor at 75,000.
Aha!
This collision just before
80,000 generated
it.
Let's look at that step by step...
But what if Cellticks were to evolve in a hashlife space? By encoding
their universe and
its evolution in such an efficient way, Gosper has
played them a dirty trick. What they perceive as the steady flow of
time for the most part does not
exist.
The hashlife program skips
over large chunks of spacetime without going through all the tedious
intermediate steps. The Cellticks may have memories of things that
never actually happened, though they were mathematically implied
from their past.
Figuring out about, and affecting, the larger world would be much
harder in the hashlife universe than in the simple Newway scenario.
Harder, but not impossible. The human race owes its present success
to
the many small problems solved during our development,
first
by biological and recently by cultural evolution.
To build on these
successes and, like the Cellticks, exceed our universe, we will surely
have to overcome much more difficult problems.
What better way
to meet the challenge than by improving our minds using the most
powerful means that come to hand!
The Road Ahead
We are at the start of something quite new in the scheme of things.
Until now we have been shaped by the invisible hand of Darwinian
evolution, a powerful process that learns from the past but is blind to
the future. Perhaps by accident,
it has engineered us into a position
where we can supply just a little of the vision
it lacks. We can choose
goals for ourselves and steadfastly pursue them, absorbing losses in
the short term
for greater benefits further ahead.
We see the road
before us only dimly— it hides
difficulties,
surprises, and rewards
Beyond the Blind Watchmaker
- Bill Gosper's 'hashlife' algorithm allows for a godlike manipulation of time, skipping vast chunks of spacetime to view the evolution of patterns.
- In a hashlife universe, inhabitants might possess memories of events that were mathematically implied but never actually occurred in a linear sequence.
- Humanity is transitioning from being products of blind Darwinian evolution to becoming agents capable of conscious, long-term vision.
- The author argues for using our emerging technological and cognitive powers to 'guide the watchmaker's hand' toward further improved vision.
- Neural efficiency in the human brain likely varies, with older, specialized structures like the retina being more optimized than larger, newer assemblies.
- Artificial intelligence development will likely mirror biological evolution, where small subsystems are highly optimized while massive structures remain less efficient.
In the metaphor of Richard Dawkins, we are the handiwork of a blind watchmaker. But we have now acquired partial sight and can, if we choose, use our vision to guide the watchmaker's hand.
158
Mind Children
The best solution turned out
to be not to display
at
all until the
calculation was finished.
The pattern might start out a billion
cells
on
a
side (necessarily mostly empty
space!)
and
its future would
be
calculated
for
a
half-billion
time-steps.
The
full
history
of the
calculation would end up compactly encoded
in the hash
table.
A
separate program could
then invoke
the
table
entries
to view
the
universe at any given time.
The viewing program allowed Gosper
to scan, godlike, forward and backward in time through the evolving
Life pattern. Where did that glider come from? Here
it
is at time 100,000.
It wasn't there at 50,000.
Nor at 75,000.
Aha!
This collision just before
80,000 generated
it.
Let's look at that step by step...
But what if Cellticks were to evolve in a hashlife space? By encoding
their universe and
its evolution in such an efficient way, Gosper has
played them a dirty trick. What they perceive as the steady flow of
time for the most part does not
exist.
The hashlife program skips
over large chunks of spacetime without going through all the tedious
intermediate steps. The Cellticks may have memories of things that
never actually happened, though they were mathematically implied
from their past.
Figuring out about, and affecting, the larger world would be much
harder in the hashlife universe than in the simple Newway scenario.
Harder, but not impossible. The human race owes its present success
to
the many small problems solved during our development,
first
by biological and recently by cultural evolution.
To build on these
successes and, like the Cellticks, exceed our universe, we will surely
have to overcome much more difficult problems.
What better way
to meet the challenge than by improving our minds using the most
powerful means that come to hand!
The Road Ahead
We are at the start of something quite new in the scheme of things.
Until now we have been shaped by the invisible hand of Darwinian
evolution, a powerful process that learns from the past but is blind to
the future. Perhaps by accident,
it has engineered us into a position
where we can supply just a little of the vision
it lacks. We can choose
goals for ourselves and steadfastly pursue them, absorbing losses in
the short term
for greater benefits further ahead.
We see the road
before us only dimly— it hides
difficulties,
surprises, and rewards
Breakout
159
far beyond our imaginings.
Somewhere
in
the distance
there
are
mountains that may be difficult to cHmb but from whose summit the
view mav be clearer.
In the metaphor of Richard Dawkins, we are the
handiwork of a blind watchmaker. But we have now acquired partial
sight and can, if we choose, use our vision to guide the watchmaker's
hand.
In this book
I have argued for the goal of nudging that hand
in the direction of further improved vision. New worlds may then
reveal themselves, to our vision and to our reach.
Appendixes
Bibliography
Acknowledgments &
Illustration Credits
Index
Al
Retinas and
Computers
THE
discussion
in Chapter
2 comparing neural
circuitrv with computer calculations makes many assumptions and
may have raised some questions.
It
is difficult enough to compare
different electronic computers, let alone such fundamentally dissimilar
systems.
Just how representative of the whole brain are the structures in the retina?
As suggested
in Chapter
2,
the size constraints and great survival
value of the
retinal
circuitrv have probably made
it more
efficient
than the average brain assembly.
In efficiency,
it mav be similar to
the wiring found in animals with small nervous svstems, which have
been mapped
in recent years, where each neuron seems
to play an
important role. A lot of evolutionary design time has been available
to get the most out of a relatively small number of neural connections.
The
larger, newer
structures
in
the human brain
are
likelv
to use
their neurons less effectively, on the average. The same considerations
can apply to artificial intelligences.
Small subsystems can be highly
optimized, but larger, less structured processes may have to loaf along
with more
fat;
there simply
is not time to optimize huge pieces of
program so well.
Your analyses are based on
a
partial
undcrstafuiijig
of the main kinds of
retinal neurons.
But other types are found occasionally.
Also, the neurons
respond to chemical messages from several sources. Don't these extra effects
throw off your calculations?
Rare connections are probably important,
but because they
are few
in number,
their
effects add
little
to the
computational quantity.
In a similar way, broadcast chemical messages
are slow and contain only a relatively small amount of information.
In
a program their effect can probably be mimicked by a modest number
of global variables that are referenced by other computations.
163
Retinas and Computers
- Rare neural connections and slow chemical messages likely contribute little to the brain's total computational quantity and can be mimicked by global variables.
- Mathematical discoveries in computer science can reduce the amount of computation required for a task by orders of magnitude.
- While a brain must simulate each neuron's function individually, a computer can use optimized algorithms to perform the work of large groups of neurons simultaneously.
- A 'clever' program can calculate the average brightness of overlapping fields by adding and subtracting only the edge values, rather than re-summing every pixel.
- Biological nervous systems cannot use these specific algorithmic shortcuts because they rely on sequential chains of logic that would create massive signal delays.
- The overall conversion ratio of neurons to calculations only changes significantly if almost every biological process can be similarly shrunk through optimization.
Instead of a thousand calculations, each additional horizontal cell costs only two.
Al
Retinas and
Computers
THE
discussion
in Chapter
2 comparing neural
circuitrv with computer calculations makes many assumptions and
may have raised some questions.
It
is difficult enough to compare
different electronic computers, let alone such fundamentally dissimilar
systems.
Just how representative of the whole brain are the structures in the retina?
As suggested
in Chapter
2,
the size constraints and great survival
value of the
retinal
circuitrv have probably made
it more
efficient
than the average brain assembly.
In efficiency,
it mav be similar to
the wiring found in animals with small nervous svstems, which have
been mapped
in recent years, where each neuron seems
to play an
important role. A lot of evolutionary design time has been available
to get the most out of a relatively small number of neural connections.
The
larger, newer
structures
in
the human brain
are
likelv
to use
their neurons less effectively, on the average. The same considerations
can apply to artificial intelligences.
Small subsystems can be highly
optimized, but larger, less structured processes may have to loaf along
with more
fat;
there simply
is not time to optimize huge pieces of
program so well.
Your analyses are based on
a
partial
undcrstafuiijig
of the main kinds of
retinal neurons.
But other types are found occasionally.
Also, the neurons
respond to chemical messages from several sources. Don't these extra effects
throw off your calculations?
Rare connections are probably important,
but because they
are few
in number,
their
effects add
little
to the
computational quantity.
In a similar way, broadcast chemical messages
are slow and contain only a relatively small amount of information.
In
a program their effect can probably be mimicked by a modest number
of global variables that are referenced by other computations.
163
264
Mind Children
It
has
happened many
times
in
computer
science
that
a
mathematical
discovery has reduced astronomically
the amount of computation
required
to get a
certain answer.
Could operations
in
the brain
be candidates for
such
improvements,
designed as
they are by a
process
that
is
unable
to
perform
large-scale restructurings?
Maybe
so.
My
retinal calculation
already benefits from a modest gain of this type (see below).
Still,
some computations are not greatly reducible, and we have no sure
way of finding optimizations for
all those that
are.
If we manage
to collapse half of what goes on in the brain to almost nothing, we
are
still
left with the other
half, and the conversion
ratio changes
insignificantly. Only
if almost every process could be shrunk would
the effect seriously accelerate my predictions.
In your ratio, 10'^ calculations per second does the job of about 20" neurons.
This budgets only 100 calculations per second for each neuron.
Surely this
is an underestimate. Many neurons integrate thousands of inputs and can
respond
in hundredths
of a
second.
It would be an underestimate
if
we were attempting to simulate the brain by simulating each of
its
neurons. But the computer can be used more efficiently when single
optimized programs do the functions of large groups of neurons. For
example, consider a
retinal
horizontal
cell.
It makes thousands of
connections to the photocells in a large field and computes the average
brightness of the field. The analogous job for a robot might be done
by a computer program that adds together thousands of pixels from
the robot's TV camera.
If done for every horizontal cell, that would
be a
lot of adding.
But there
is a way to avoid most of the
effort.
The following idea works well on a two-dimensional image, but
I will
present
it in one dimension because
it is easier to explain.
Let's say we have a million photocells all in a row, with a horizontal
cell connected
to every adjacent group of 1,000 of them.
Thus, the
first horizontal cell attaches to photocells
1 through 1,000, the second
covers 2 through
1,001, and so on, making a
total of slightly fewer
than
a
million horizontal
cells.
Each
horizontal
cell computes the
average brightness of
its
field.
A naively written program would
do 1,000 additions for each of the million horizontal
cells. A clever
program would exploit the fact that the sum produced by the second
horizontal
cell
differs from
that of the
first only
in
that
it includes
photocell
1,001 and
that
it excludes photocell
1.
Thus the second
sum can be calculated from the
first one by merely subtracting the
Retinas and Computers
first photocell value and adding the 1,001st.
Similarly, the third sum
is calculated from the second by subtracting photocell 2 and adding
photocell 1,002. And so on.
Instead of a thousand calculations, each
additional horizontal
cell costs only two.
This technique works for
computers, but
it cannot be exploited
in
a nervous system design
for two
reasons.
Since each sum depends on
the one before
it,
the
final sum depends on a chain of almost a million
steps.
At a
minimum of a thousandth-of-a-second delay per neuron, the rightmost
cell would not respond correctly to a change in the input for many
minutes! Even then the answer would be wrong because small errors
in the sum would rapidly accumulate down the long chain. On the
computer, however, the technique works very well because each step
takes only about a microsecond, and the arithmetic
is done entirely
without error. Our robot vision programs are filled with shortcuts of
this kind, which exploit the great speed and precision of computer
operations. Nervous systems, on the other hand, are filled with rich,
overlapping interconnections, exploiting the power of self-replicating
genetic construction machinery.
Maybe those tricks work for the retina, but there
is no guarantee that they
will work for
all
the diverse structures
in
the brain.
It
is possible that
some parts of the brain use their neurons so cleverly that a computer
program cannot do better than to simulate individual neurons and
synapses, but it is unlikely. The retina example illustrates two general
principles.
The
first
is
that the slow switching speed and
limited
signaling accuracy of neurons rules out certain solutions for neural cir-
cuitry that are easy for computers. Second, a smooth function applied
repeatedly on overlapping inputs can be decomposed into subparts in
such
a way
that the subparts can be used more than once.
Many
neural structures
in
the brain involve regular cross connections of
many inputs to many outputs, making them candidates for this kind of
economy. The human cerebral cortex, one of the largest structures,
is
a crumpled disk about 2 millimeters thick and 20 centimeters in diam-
eter, containing 10 billion neurons arranged into a half-dozen layers,
wired quite repetitively. The well-studied one or two percent of this
sheet that handles vision carries further the processing begun in the
retinas, apparently using similar methods. Edges and motion in differ-
ent directions are picked out cleanly in the first few layers, and those
feed layers that respond to more complex patterns such as corners.
165
Neural Circuitry vs Computer Logic
- Computers utilize speed and precision to perform recursive calculations that would fail in biological systems due to error accumulation.
- The human brain's architecture relies on repetitive, overlapping interconnections necessitated by the limits of genetic information.
- The cerebral cortex's repetitive wiring suggests that complex processing, like vision, can be decomposed into efficient, reusable sub-computations.
- Small organisms like the sea slug Aplysia may have uniquely hard-wired synapses, whereas larger brains require more generalized structural rules.
- While simulating individual neurons is computationally expensive, special-purpose hardware could bridge the gap if direct simulation is required.
- The primary difference between a fixed neural circuit and a computer is the speed of reprogramming, which occurs over evolutionary timescales for biology.
Some regularity is to be expected in the nervous system because there is insufficient information in the 10^9 bits of the human genome to custom-wire many of the 10^14 synapses in the brain.
Retinas and Computers
first photocell value and adding the 1,001st.
Similarly, the third sum
is calculated from the second by subtracting photocell 2 and adding
photocell 1,002. And so on.
Instead of a thousand calculations, each
additional horizontal
cell costs only two.
This technique works for
computers, but
it cannot be exploited
in
a nervous system design
for two
reasons.
Since each sum depends on
the one before
it,
the
final sum depends on a chain of almost a million
steps.
At a
minimum of a thousandth-of-a-second delay per neuron, the rightmost
cell would not respond correctly to a change in the input for many
minutes! Even then the answer would be wrong because small errors
in the sum would rapidly accumulate down the long chain. On the
computer, however, the technique works very well because each step
takes only about a microsecond, and the arithmetic
is done entirely
without error. Our robot vision programs are filled with shortcuts of
this kind, which exploit the great speed and precision of computer
operations. Nervous systems, on the other hand, are filled with rich,
overlapping interconnections, exploiting the power of self-replicating
genetic construction machinery.
Maybe those tricks work for the retina, but there
is no guarantee that they
will work for
all
the diverse structures
in
the brain.
It
is possible that
some parts of the brain use their neurons so cleverly that a computer
program cannot do better than to simulate individual neurons and
synapses, but it is unlikely. The retina example illustrates two general
principles.
The
first
is
that the slow switching speed and
limited
signaling accuracy of neurons rules out certain solutions for neural cir-
cuitry that are easy for computers. Second, a smooth function applied
repeatedly on overlapping inputs can be decomposed into subparts in
such
a way
that the subparts can be used more than once.
Many
neural structures
in
the brain involve regular cross connections of
many inputs to many outputs, making them candidates for this kind of
economy. The human cerebral cortex, one of the largest structures,
is
a crumpled disk about 2 millimeters thick and 20 centimeters in diam-
eter, containing 10 billion neurons arranged into a half-dozen layers,
wired quite repetitively. The well-studied one or two percent of this
sheet that handles vision carries further the processing begun in the
retinas, apparently using similar methods. Edges and motion in differ-
ent directions are picked out cleanly in the first few layers, and those
feed layers that respond to more complex patterns such as corners.
165
166
Mind Children
Some regularity
is to be expected
in the nervous system because
there is insufficient information in the 10^° bits of the human genome
to custom-wire many of the
10^'* synapses in the brain.
Interestingly,
this argument may not hold for small nervous systems such as that of
the much-studied sea slug Aplysia, which has about 100,000 neurons
clumped into 100 ganglia. Several of the ganglia have been mapped,
and
the neurons and
their interconnections seem
to be exactly the
same from animal
to animal, with each junction playing
a unique
and important role in the animal's behavior.
It
is plausible that the
few billion bits in Aplysia's genetic code contain special instructions
for wiring each of
its several million synapses.
If
it should turn out
that a direct neural simulation is necessary for particularly irreducible
parts of the vertebrate
brain,
it would
still be possible
to stay on
my time track. A general-purpose computer suffers a thousandfold
handicap over my
retinal conversion number
if forced
to simulate
individual neurons. The speed could be regained, however, at the cost
of flexibility, by building special-purpose neuron-simulating machines
using about
the same amount
of
circuitry
as
the general-purpose
computer. I'm betting
it won't be necessary.
There's something asymmetrical about equating the retina with a computer.
Doesn't a computer programmed to emulate a neural circuit have considerable
potential not found in the neural arrangement itself? The computer
is, after
all, general-purpose and can be reprogrammed for radically different
tasks.
The retina
is forever stuck with doing
its one computation. The difference
is only one of convenience and speed of reprogramming. The retina
can and has been reprogrammed many times during the course of
our evolution.
The computation done by the retina of a particular
individual organism
is fixed
in the same sense that the computation
of a running computer is fixed by the program it happens to contain at
that moment. The set of all possible programs that the computer may
contain
is analogous to the set of all possible ways a given amount
of neural
tissue could be connected.
Evolution
selected
a
certain
configuration of neuron properties and interconnections within one
set in the same sense that our research is selecting a certain program.
Of course there
is a
difference
in programming
time.
The neural
configuration
is controlled by genetic instructions, and each change
requires the growth of a new organism, a process that may take years.
Evolutionary Design vs. Computer Architecture
- The configuration of neural tissue is analogous to a computer program, but genetic evolution operates millions of times slower than computer testing.
- Special-purpose hardware offers speed advantages but lacks the flexibility required for the iterative nature of basic robotics research.
- Biological neurons are burdened by 'baggage' because they must grow and maintain themselves from the inside out, unlike externally manufactured components.
- Darwinian evolution is a relentless optimizer of existing designs but a poor redesigner, often stuck with primitive foundations like chemical signaling.
- Human engineering allows for fundamental hardware shifts—from vacuum tubes to transistors—while preserving and transferring the underlying software logic.
- Future intelligent robots will likely combine specialized hardware for efficiency with a general-purpose superstructure for self-improvement.
Darwinian evolution is a relentless optimizer of a given design, nudging the parameters this way and that, adding a step here, removing one there, in a plodding, tinkering, way.
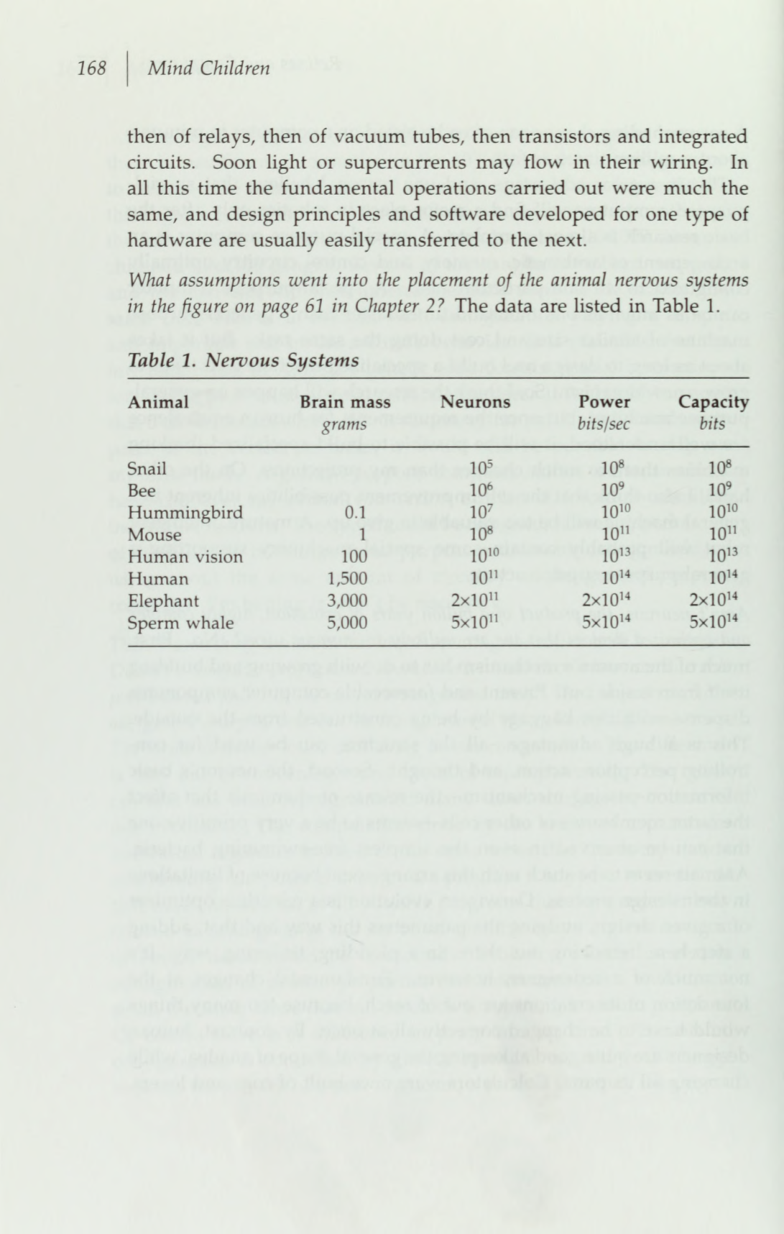
166
Mind Children
Some regularity
is to be expected
in the nervous system because
there is insufficient information in the 10^° bits of the human genome
to custom-wire many of the
10^'* synapses in the brain.
Interestingly,
this argument may not hold for small nervous systems such as that of
the much-studied sea slug Aplysia, which has about 100,000 neurons
clumped into 100 ganglia. Several of the ganglia have been mapped,
and
the neurons and
their interconnections seem
to be exactly the
same from animal
to animal, with each junction playing
a unique
and important role in the animal's behavior.
It
is plausible that the
few billion bits in Aplysia's genetic code contain special instructions
for wiring each of
its several million synapses.
If
it should turn out
that a direct neural simulation is necessary for particularly irreducible
parts of the vertebrate
brain,
it would
still be possible
to stay on
my time track. A general-purpose computer suffers a thousandfold
handicap over my
retinal conversion number
if forced
to simulate
individual neurons. The speed could be regained, however, at the cost
of flexibility, by building special-purpose neuron-simulating machines
using about
the same amount
of
circuitry
as
the general-purpose
computer. I'm betting
it won't be necessary.
There's something asymmetrical about equating the retina with a computer.
Doesn't a computer programmed to emulate a neural circuit have considerable
potential not found in the neural arrangement itself? The computer
is, after
all, general-purpose and can be reprogrammed for radically different
tasks.
The retina
is forever stuck with doing
its one computation. The difference
is only one of convenience and speed of reprogramming. The retina
can and has been reprogrammed many times during the course of
our evolution.
The computation done by the retina of a particular
individual organism
is fixed
in the same sense that the computation
of a running computer is fixed by the program it happens to contain at
that moment. The set of all possible programs that the computer may
contain
is analogous to the set of all possible ways a given amount
of neural
tissue could be connected.
Evolution
selected
a
certain
configuration of neuron properties and interconnections within one
set in the same sense that our research is selecting a certain program.
Of course there
is a
difference
in programming
time.
The neural
configuration
is controlled by genetic instructions, and each change
requires the growth of a new organism, a process that may take years.
Retinas and Computers
A corresponding change can often be tested on a computer in minutes,
about a million times as fast.
This
is
a great advantage, and one reason
I believe
that special-
purpose computers will find a major place in robotics only after the
basic research
is almost complete. A special-purpose computer
is an
arrangement of arithmetic, memory, and control
circuitr\' optimally
configured
to do one particular
task.
A special-purpose computer
can be as much as one thousand times faster than a general-purpose
machine of similar size and cost doing the same
task.
But
it takes
about as long to design and build a specialized machine as
it takes to
grow a new organism. So,
I think the research will happen on general-
purpose machines, but once the requirements for human equivalence
are well understood,
it will be possible to build specialized thinking
machines that are much cheaper than my projections. On the other
hand,
I also think that the self-improvement possibilities inherent in a
general machine will be too valuable to give up. A mature, intelligent
robot
will probably
contain some
special machinery
supporting
a
general-purpose superstructure.
Aren't neurons, the product of a billion years of ei^olution, highly complex
and optimized devices
that we are unlikely
to improve upon?
No.
First,
much of the neuron's mechanism has to do with growing and building
itself from inside out.
Present and foreseeable computer components
dispense with
this baggage bv being constructed from the outside.
This
is
a huge advantage—all
the structure can be used
for con-
trolling perception, action, and thought.
Second, the neuron's basic
information-passing mechanism—the release of chemicals that affect
the outer membranes of other cells—seems to be a very primitive one
that can be observed
in even
the simplest free-swimming bacteria.
Animals seem to be stuck with this arrangement because of limitations
in their design process. Darwinian evolution is a relentless optimizer
of a given design, nudging the parameters this way and that, adding
a step here, removing one there,
in a plodding, tinkering, way.
It's
not much
of
a
redesigner,
however.
Fundamental changes
at
the
foundation of its creations are out of reach, because too many things
would have to be changed correctly
all at once. By contrast, human
designers are quite good at keeping the general shape of an idea, while
changing all
its parts. Calculators were once built of cogs and levers.
167
168
Mind Children
then of relays, then of vacuum tubes, then transistors and integrated
circuits.
Soon Hght or supercurrents may flow
in
their wiring.
In
all this time the fundamental operations carried out were much the
same, and design principles and software developed for one type of
hardware are usually easily transferred to the next.
What assumptions went into the placement of the animal nervous systems
in the figure on page 61
in Chapter 2? The data are listed in Table
1.
Table
1. Nervous Systems
Animal
Brain mass
Neurons
Power
Capacity
grams
bits/sec
bits
Snail
10'
108
10«
Bee
10^
10'
10'
Hummingbird
0.1
107
10'°
10'"
Mouse
1
10«
10"
10"
Human vision
100
lO'o
10"
10"
Human
1,500
10"
10^4
10'*
Elephant
3,000
2x10"
2x10^^
2x10'*
Sperm whale
5,000
5x10"
5x10'^
5x10'-'
Quantifying Computational Surprise
- Comparing computer power is historically contentious due to marketing and the lack of a universal metric.
- Simple metrics like additions per second are easily gamed by specialized, non-functional hardware.
- The author proposes using Claude Shannon's information theory to define computing power as the amount of 'surprise' or information generated per second.
- Information is quantified by the unpredictability of a machine's state transitions; a transition to a highly improbable state conveys more bits.
- A machine only performs useful computation for an observer if that observer does not already know the outcome in advance.
- Total information capacity is determined by the memory size, while processing power is the speed at which a machine steps through these states.
A machine does a useful computation for you only if you don't already know all the answers in advance!
A2
Measuring
Computer Power
B,EC A USE of its effect on computer sales, compar-
ing the relative power and cost-effectiveness of different computers
has always been a contentious affair.
But the range of disagreement
among manufacturers about the power of one another's machines
is
usually
less than
a
factor of ten, and such a small
ratio does not
materially affect the appearances of the diagrams nor the conclusions
of Chapter 2, where scales of a trillion are exhibited. Yet any particular
formula for estimating power may be grossly misled by an unlucky
or diabolic counterexample. For instance,
if a computer's power were
defined simply by how many additions per second
it could do, an
otherwise
useless
special
circuit made
of an array
of
fast adders,
and nothing else, costing a few hundred dollars, could outperform a
$10-million supercomputer. My intuition about useful computation
has suggested a trickier but,
I believe, safer measure. Be assured that
for reasonable machines my formulas give almost exactly the same
numbers for processing power as simpler approaches.
Things that compute massively can alter their internal variables, and
their outputs, in unexpected ways. We can say a stationary rock, or
even a rolling one, or the adder array described in the last paragraph,
does
little computing because
it
is
so
predictable,
while
a mouse
scurrying in
a maze must be doing quite a
bit.
Claude Shannon's
information theory
is built on a way of quantifying the amount of
surprise, or information, in a message. The more unexpected the next
piece of message, the greater the amount of information
it contains.
1
will use this approach to measure the information in a computation.
Computing power
will be defined
as
the amount
of information,
or surprise, exhibited per second
as a machine runs,
that
is,
as
it
repeatedly changes from one
internal
state
to
another.
The more
unexpected the next state of the machine, the greater the amount of
169
270
Mind Children
information contributed by the transition to that state. Quantitatively,
if to the best of our knowledge there is a probability p that the machine
will go
into
a
certain
state,
then
if
it does go
into
that
state,
the
transition will have conveyed -logjp bits of information (log2 means
logarithm to the base 2, and bits are binary digits).
If the probability p
was 1/2, the transition will convey just
1 bit of information.
If p was
1/2", the n bits will have been conveyed. A p of 1/1,000 gives about
10 bits of information.
The average
information conveyed
in
a
transition
is found by
multiplying the information conveyed in a transition to each possible
next state by the probabihty of going to that state, and then summing
over all the possibilities:
N
Information per transition = 2^ - Pi logj p, hits
i=
1
where N
is the number of possible
states and
p,
is the probability
that the ith state will be the next one. The computational value of a
given transition can be different for different observers because they
assign different probabilities to the outcomes. The information reaches
a maximum of log2 N in a totally ignorant observer, for whom all the
p, are equal.
At the other extreme, an all-knowing witness can be
certain that the next state will be
;, and thus
let
p, =
\ and and
all
the other p, = 0, making the information 0. A machine does a useful
computation for you only
if you don't already know all the answers
in advance!
Computing requires long sequences of these kinds of transitions
from one state to another.
The total information capacity of a system
is log2of all the states
it can ultimately reach.
In a general-purpose
computer this
is simply the total memory size. A powerful machine
is able to step through states quickly.
I measure processing power by
dividing the transition information by the average time required for a
transition. This gives us the formula
I Pit,
The
units
are
bits per second.
This measure
also
is reduced by
predictability.
Measuring Computational Power
- Computational power is defined by the information transition rate, measured in bits per second and reduced by predictability.
- A computer repeating a loop becomes totally predictable, effectively dropping its computing power to zero.
- High-level languages lower processing power compared to machine language because they produce more stereotyped, predictable instruction sequences.
- Increasing memory size modestly boosts power because the identity of a memory location is considered a 'surprise' to the system.
- In parallel machines, the majority of information surprise resides in the data streams rather than the instruction stream.
- Practical power estimation often requires assuming a standard set of operations and equal probabilities for memory access due to the complexity of real-world statistics.
A computer endlessly repeating a program loop becomes totally predictable, and its computing power drops to zero.
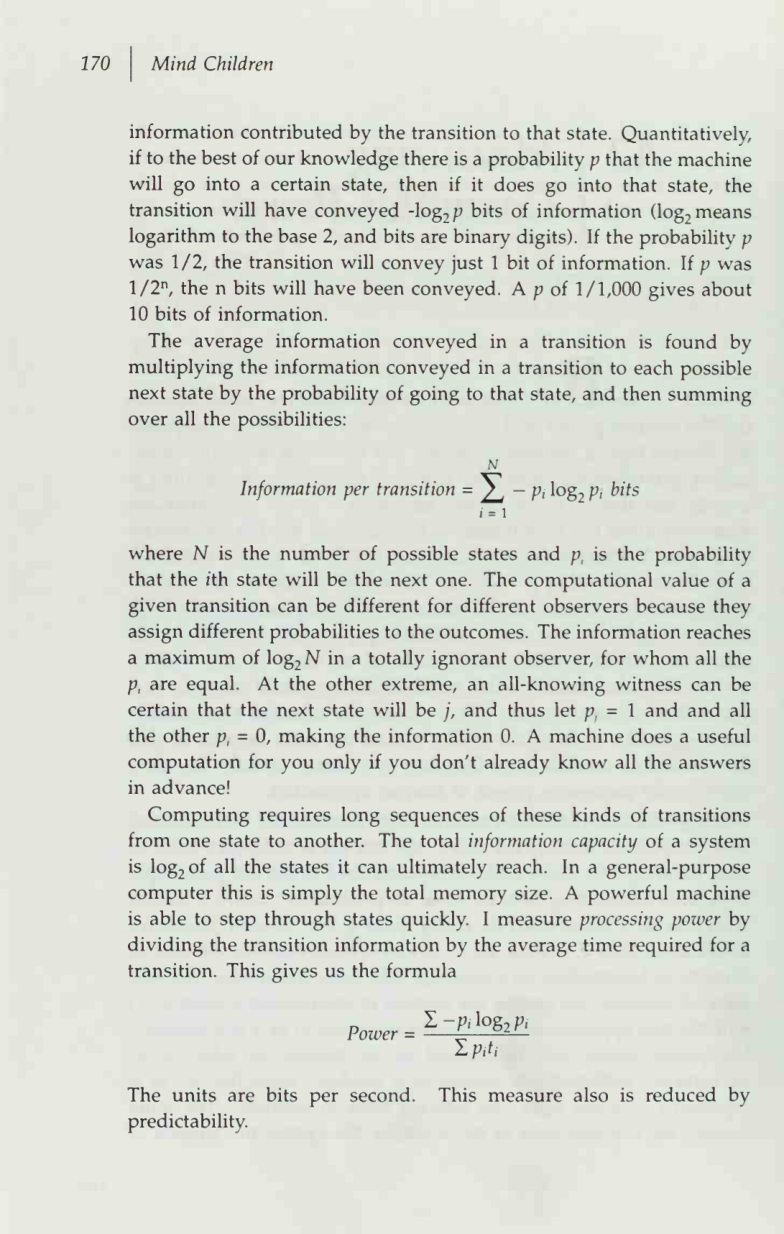
270
Mind Children
information contributed by the transition to that state. Quantitatively,
if to the best of our knowledge there is a probability p that the machine
will go
into
a
certain
state,
then
if
it does go
into
that
state,
the
transition will have conveyed -logjp bits of information (log2 means
logarithm to the base 2, and bits are binary digits).
If the probability p
was 1/2, the transition will convey just
1 bit of information.
If p was
1/2", the n bits will have been conveyed. A p of 1/1,000 gives about
10 bits of information.
The average
information conveyed
in
a
transition
is found by
multiplying the information conveyed in a transition to each possible
next state by the probabihty of going to that state, and then summing
over all the possibilities:
N
Information per transition = 2^ - Pi logj p, hits
i=
1
where N
is the number of possible
states and
p,
is the probability
that the ith state will be the next one. The computational value of a
given transition can be different for different observers because they
assign different probabilities to the outcomes. The information reaches
a maximum of log2 N in a totally ignorant observer, for whom all the
p, are equal.
At the other extreme, an all-knowing witness can be
certain that the next state will be
;, and thus
let
p, =
\ and and
all
the other p, = 0, making the information 0. A machine does a useful
computation for you only
if you don't already know all the answers
in advance!
Computing requires long sequences of these kinds of transitions
from one state to another.
The total information capacity of a system
is log2of all the states
it can ultimately reach.
In a general-purpose
computer this
is simply the total memory size. A powerful machine
is able to step through states quickly.
I measure processing power by
dividing the transition information by the average time required for a
transition. This gives us the formula
I Pit,
The
units
are
bits per second.
This measure
also
is reduced by
predictability.
Measuring Computer Power
171
The formulas capture a number of ideas.
A computer endlessly
repeating a program loop becomes totally predictable, and its comput-
ing power drops to zero. Programs written in high-level languages or
using interactive environments often run much more slowly than
if
written directly in the computer's machine language. High-level lan-
guage constructs are converted to stereotyped sequences of machine
instructions, making the program more predictable than one written
in pure machine
language,
thus lowering
the
effective processing
power. Adding memory to a computer modestly increases its power
even without any increase in
its raw speed. Among the techniques
for using memory to enhance computation are tables of previously
computed results and reorganizations of data structures that take up
more space but are faster to access. This effect, of memory increasing
computational power, appears in my measure because in a computer
instruction the identity of the memory location referenced is as much
a surprise as which operation
is to be performed. As the number of
possible locations increases, so does the amount of surprise, though
modestly. Doubling the memory increases the power by only one bit
per instruction time.
In highly parallel machines, especially those using a single instruc-
tion stream to control numerous processing units, most of the surprise
is in the parallel data, not the instructions. Although the total number
of bits flowing in the data streams represents an upper bound to the
processing power of this kind
of machine,
the
real power may be
considerably less because of intrinsic redundancies or predictabilities.
Estimating these
in disparate machines designed
for
finite element
analyses, symbolic processing, cellular automata, or playing chess
is
difficult. The figure on page 64 is not much affected by this difficulty,
because almost
all the machines on
it are of the conventional von
Neumann type, where only one datum
is processed per instruction.
Future versions of the graph may have to deal with massively parallel
machines, some of which are just now being tested with real problems.
Even with conventional architectures, the power measurements get
messy when the formulas are applied
to real computers. How can
probabilities be assigned
to
different
instruction
types when each
kind of program exhibits
its own statistics?
In computers with large
instruction sets, many operations are almost never used. Besides this,
detailed descriptions are hard to come by for many old machines. My
compromise
is to assume every machine uses 32 distinct operations
171
Mind Children
(six bits worth) that are mixed in equal proportion.
If each memory
location
is equally likely to be addressed in an instruction, then the
information
it contributes
is equal
to the logarithm of the memory
size. This is an upper bound. Since the contents of memory locations
themselves can change,
the data
stored
there are also
a source of
surprise,
but only
if
the
data
are
read
rather than being simply
overwritten.
If we assume that half the instructions read data,
this
channel contributes a maximum of half of a word size of information.
In a parallel machine controlled by a single instruction stream, the
aggregate word size of the parallel data streams would be considered,
and this would be the major component of total information.
Another
issue
is
timing.
Once
again,
obtaining
great
detail
is
difficult.
Two readily available numbers, however, are the average
times to do an addition and
to multiply.
Addition
is typical of the
fastest computer operation, while multiplication
is slow.
1 assume
that the instruction mix contains seven instructions taking as long as
an add for every one taking as long as a multiply.
With these approximations the power formula becomes
6 + logT memory + word /2
Power = —
1,
-^
-—
(7 X Tadd + T^multiply If O
where memory
is the capacity of the machine's fast memory in indi-
vidually addressable words, and word
is the size of a data word in
bits. The capacity of the machine is found by multiplying memory by
word.
For decimal machines, the number of bits
is approximated by
multiplying the number of decimal digits by four.
This formula was
used to plot the points in the figure on page 64, and the data for that
figure is listed in Table 2.
A Nautical Metaphor
I have defined two
qualities
essential
for
interesting computation
or thought.
They are computational power and
capacity.
Basically,
power is the speed of the machine, and capacity
is
its memory size.
Computing can be compared with a sea voyage in a motorboat. How
fast a journey can be completed depends on the power of the boat's
engine. The maximum length of any journey is limited by the capacity
of the boat's fuel tank. The effective speed
is decreased, in general.
The Nautical Metaphor of Computing
- A formal power formula is established for computing machines, integrating memory capacity, word size, and the speed of addition and multiplication operations.
- Computational power is defined as the speed of the machine, while capacity is defined as its memory size.
- The author employs a nautical metaphor where power is the engine speed, capacity is the fuel tank size, and parallel computing is a fleet of small boats.
- Input/output devices are compared to sails that capture environmental power, potentially providing answers that would otherwise require computation.
- Historical data from 1891 to 1941 tracks the evolution of mechanical and relay-based machines, comparing their power-to-cost ratios against human performance.
Some computations are like a trip to a known location on a distant shore; others resemble a mapless search for a lost island.
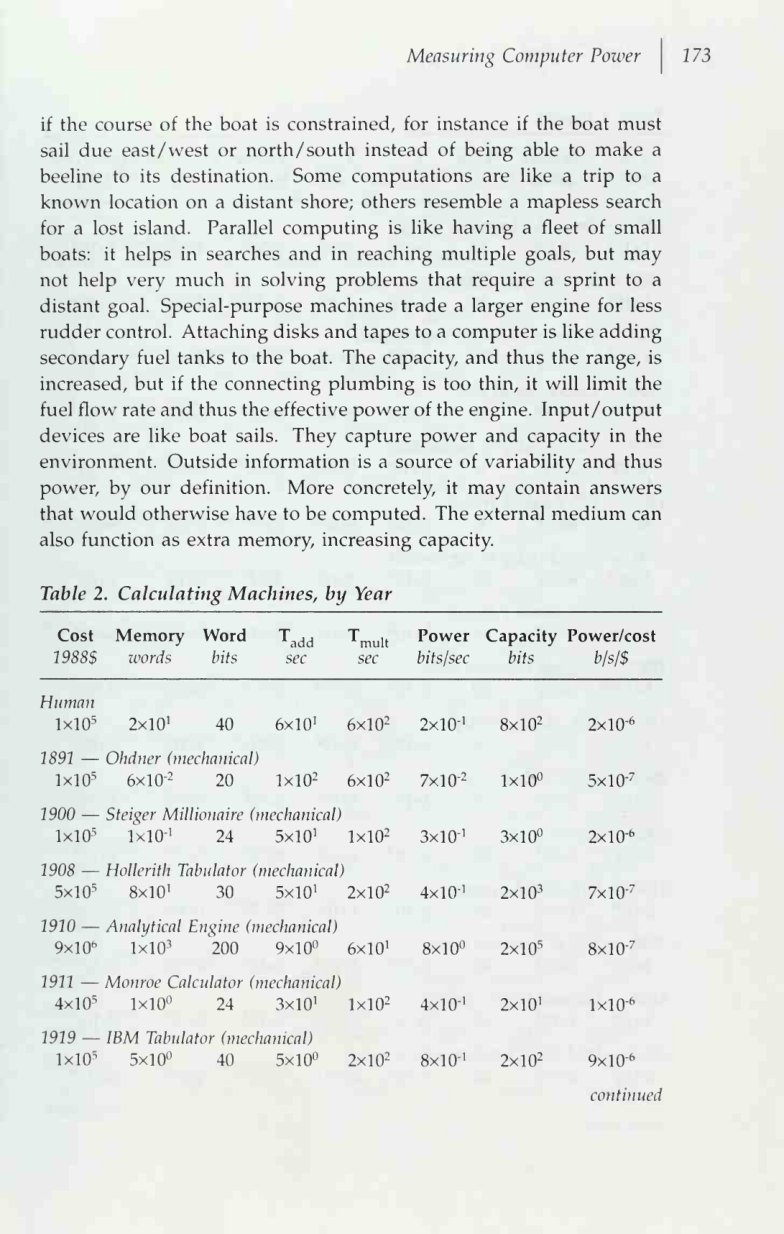
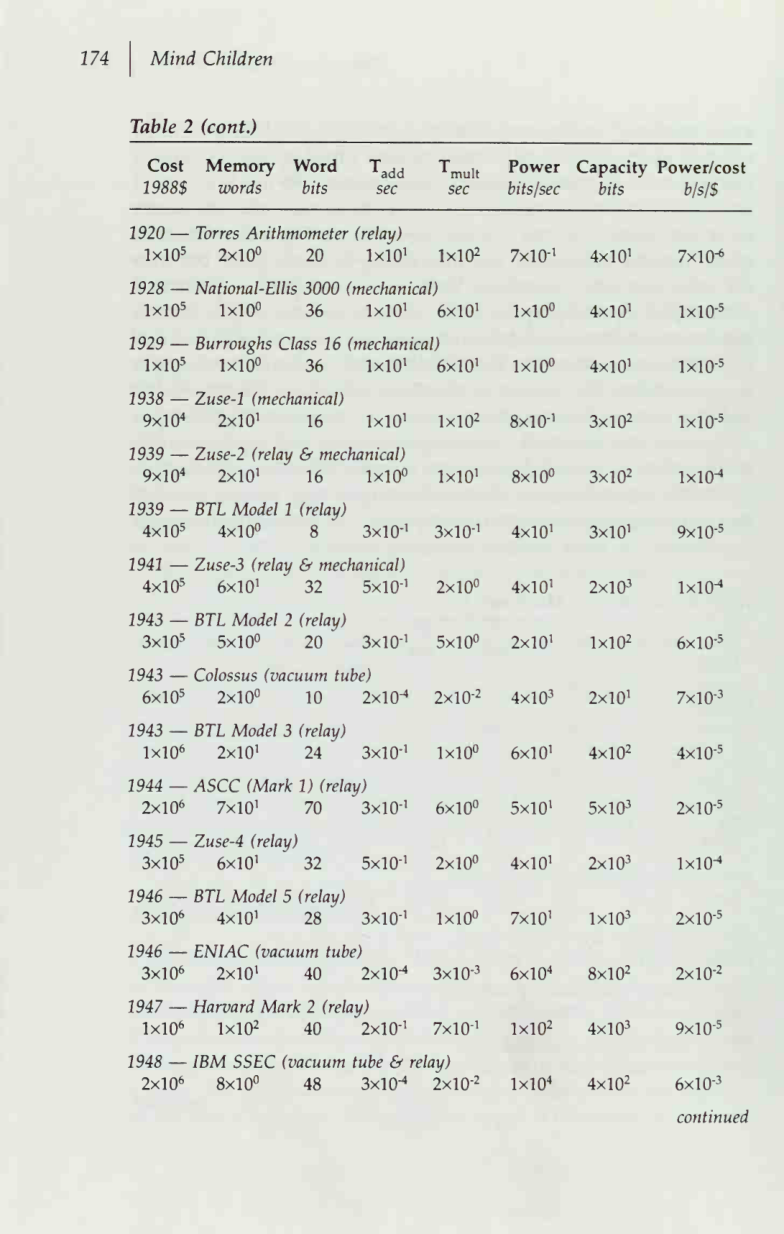
171
Mind Children
(six bits worth) that are mixed in equal proportion.
If each memory
location
is equally likely to be addressed in an instruction, then the
information
it contributes
is equal
to the logarithm of the memory
size. This is an upper bound. Since the contents of memory locations
themselves can change,
the data
stored
there are also
a source of
surprise,
but only
if
the
data
are
read
rather than being simply
overwritten.
If we assume that half the instructions read data,
this
channel contributes a maximum of half of a word size of information.
In a parallel machine controlled by a single instruction stream, the
aggregate word size of the parallel data streams would be considered,
and this would be the major component of total information.
Another
issue
is
timing.
Once
again,
obtaining
great
detail
is
difficult.
Two readily available numbers, however, are the average
times to do an addition and
to multiply.
Addition
is typical of the
fastest computer operation, while multiplication
is slow.
1 assume
that the instruction mix contains seven instructions taking as long as
an add for every one taking as long as a multiply.
With these approximations the power formula becomes
6 + logT memory + word /2
Power = —
1,
-^
-—
(7 X Tadd + T^multiply If O
where memory
is the capacity of the machine's fast memory in indi-
vidually addressable words, and word
is the size of a data word in
bits. The capacity of the machine is found by multiplying memory by
word.
For decimal machines, the number of bits
is approximated by
multiplying the number of decimal digits by four.
This formula was
used to plot the points in the figure on page 64, and the data for that
figure is listed in Table 2.
A Nautical Metaphor
I have defined two
qualities
essential
for
interesting computation
or thought.
They are computational power and
capacity.
Basically,
power is the speed of the machine, and capacity
is
its memory size.
Computing can be compared with a sea voyage in a motorboat. How
fast a journey can be completed depends on the power of the boat's
engine. The maximum length of any journey is limited by the capacity
of the boat's fuel tank. The effective speed
is decreased, in general.
Measuring Computer Power
173
if the course of the boat
is constrained, for instance
if the boat must
sail due east/west or north/south instead of being able to make a
beeline
to
its destination.
Some computations are
like
a
trip
to
a
known location on a distant shore; others resemble a mapless search
for a
lost island.
Parallel computing
is
like having a
fleet of small
boats:
it helps in searches and
in reaching multiple goals, but may
not help very much
in solving problems that require a sprint
to a
distant goal. Special-purpose machines trade a larger engine for less
rudder control. Attaching disks and tapes to a computer is like adding
secondary fuel tanks to the boat. The capacity, and thus the range, is
increased, but
if the connecting plumbing
is too thin,
it will limit the
fuel flow rate and thus the effective power of the engine. Input/output
devices are like boat
sails.
They capture power and capacity in the
environment. Outside information is a source of variability and thus
power, by our definition.
More concretely,
it may contain answers
that would otherwise have to be computed. The external medium can
also function as extra memory, increasing capacity.
Table 2. Calculating Machines, by Year
Cost
1988$
Memory
Word
words
bits
"^add
sec
^mult
sec
Power
bits/sec
Capacity
bits
Power/cost
b/s/$
Human
1x10^
2x10'
40
6x10'
6x102
2x10-'
8x102
2x10-6
1891 —
1x105
Ohdner (mechanical)
6x10-2
20
1x102
6x102
7x10-2
1x10"
5x10-7
1900 —
IxlO'
Steiger Millionaire (mechanical)
1x10-'
24
5x10'
1X102
3x10'
3x10"
2x10-6
1908 —
5x105
Hollerith Tabulator (mechanical
8x10'
30
5x10'
2x102
4x10'
2x103
7x10-7
1910 —
9x10^
Analytical Engine (mechanical)
1x10'
200
9x10'^
6x10'
8x10"
2x105
8x10-7
1911 —
4x105
Monroe Calculator (mechanical)
1x10"
24
3x10'
1x102
4x10'
2x10'
1x10-6
1919 —
1x105
IBM Tabulator (mechanical)
5x10"
40
5x10"
2x102
8x10'
2x102
9x10-6
continued
174
Mind Children
Table 2 (cont.)
Cost
Memory
Word
T^j^
Tj^^j^
Power
Capacity Power/cost
1988$
words
bits
sec
sec
bits/sec
bits
b/s/$
1920 — Torres Arithmometer (relay)
1x105
2x10°
20
1x10^
1x10^
7x10-1
4x10^
7x10-^
I92S — National-Ellis 3000 (mechanical)
1x10^
1x10°
36
1x10'
6x10'
1x10°
4x10'
IxlO'^
1929 — Burroughs Class 16 (mechanical)
1x10^
1x10°
36
1x10'
6x10'
1x10°
4x10'
IxlO-^
1938 — Zuse-1 (mechanical)
9x10*
2x10'
16
1x10'
1x10^
8x10"'
3x10^
IxlO'^
1939 — Zuse-2 (relay & mechanical)
9x10*
2x10'
16
1x10°
1x10'
8x10°
3x10^
IxlO"*
1939 — BTL Model
1
(relay)
4x105
4x10°
8
3x10'
3x10'
4x10'
3x10'
9x10-5
1941 — Zuse-3 (relay & mechanical)
4x105
6x10'
32
5x10'
2x10°
4x10'
2x10^
1x10"^
1943 — BTL Model 2 (relay)
3x105
5x10°
20
3x10-'
5x10°
2x10'
1x10^
6x10-5
2943 — Colossus (vacuum tube)
6x105
2x10°
10
2x10^
2x10-2
4x10^
2x10'
7x10-3
1943 — BTL Model 3 (relay)
1x10^
2x10'
24
3x10-'
1x10°
6x10'
4x10^
4x10-5
1944 — ASCC (Mark 1) (relay)
2x10^
7x10'
70
3x10'
6x10°
5x10'
5x10^
2x10-5
1945 — Zuse-4 (relay)
3x105
6x10'
32
5x10'
2x10°
4x10'
2x10^
1x10"^
2946 — BTL Model 5 (relay)
3x10^
4x10'
28
3x10'
1x10°
7x10'
1x10^
2x10-5
2946 — ENIAC (vacuum tube)
3x10^
2x10'
40
2x10-^
3x10-^
6x10*
8x10^
2x10-^
2947 — Harvard Mark 2 (relay)
1x10^
1x102
40
2x10'
7x10'
1x10^
4x10^
9x10-5
2948 — IBM SSEC (vacuum tube & relay)
2x10^
8x10°
48
3x10^
2x10-^
1x10"
4x10^
6x10-^
continued
Evolution of Computing Power
- The data tracks the exponential growth of computing power from 1943 to 1979, transitioning from mechanical relays to vacuum tubes and eventually to integrated circuits.
- Early machines like the BTL Model 2 and Colossus operated with speeds measured in fractions of a second, while later systems like the Cray-1 reached nanosecond scales.
- The tables highlight a dramatic shift in the power-to-cost ratio, showing how much more 'bits per second' a dollar could buy as technology matured.
- Memory capacity evolved from a few hundred words in the 1940s to hundreds of thousands of words by the late 1970s.
- The transition to transistors in the late 1950s and microprocessors in the 1970s served as the primary catalysts for massive increases in bits-per-second processing power.
1943 — Colossus (vacuum tube) ... 1976 — Apple II (integrated circuit) ... 1976 — Cray-1 (integrated circuit)
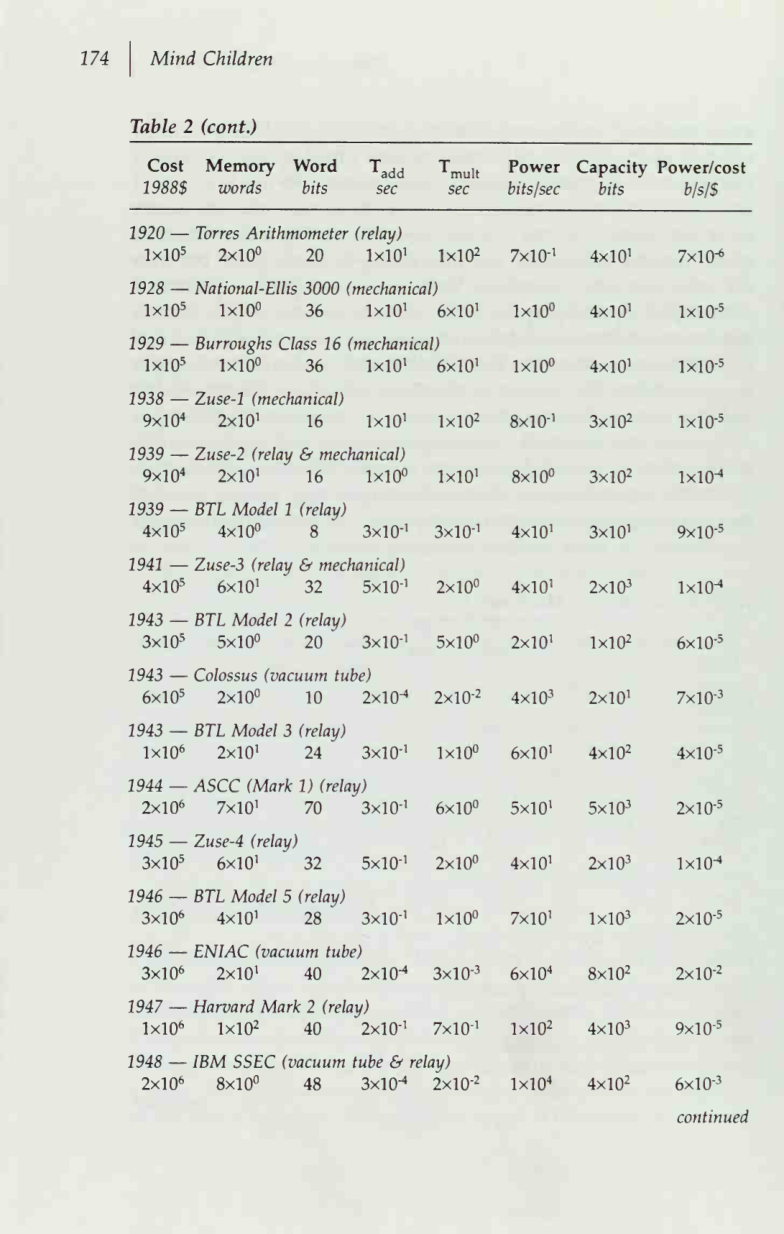

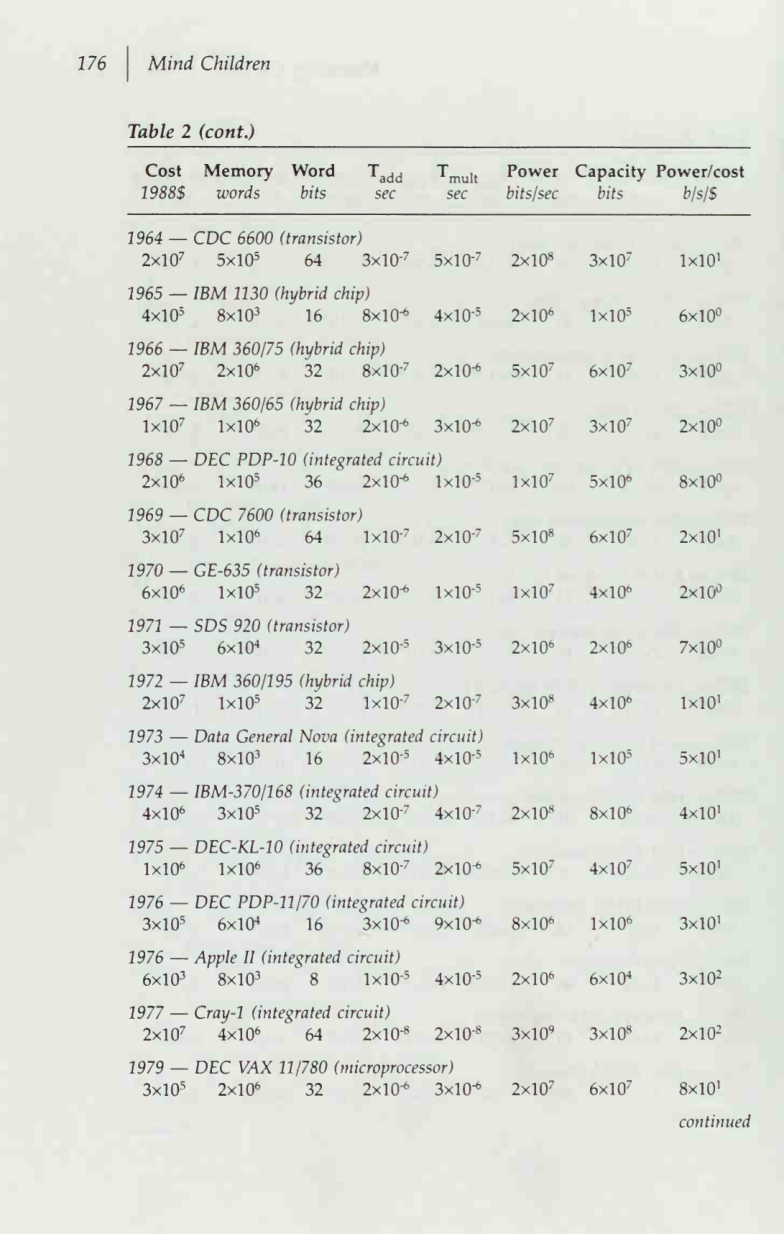
174
Mind Children
Table 2 (cont.)
Cost
Memory
Word
T^j^
Tj^^j^
Power
Capacity Power/cost
1988$
words
bits
sec
sec
bits/sec
bits
b/s/$
1920 — Torres Arithmometer (relay)
1x105
2x10°
20
1x10^
1x10^
7x10-1
4x10^
7x10-^
I92S — National-Ellis 3000 (mechanical)
1x10^
1x10°
36
1x10'
6x10'
1x10°
4x10'
IxlO'^
1929 — Burroughs Class 16 (mechanical)
1x10^
1x10°
36
1x10'
6x10'
1x10°
4x10'
IxlO-^
1938 — Zuse-1 (mechanical)
9x10*
2x10'
16
1x10'
1x10^
8x10"'
3x10^
IxlO'^
1939 — Zuse-2 (relay & mechanical)
9x10*
2x10'
16
1x10°
1x10'
8x10°
3x10^
IxlO"*
1939 — BTL Model
1
(relay)
4x105
4x10°
8
3x10'
3x10'
4x10'
3x10'
9x10-5
1941 — Zuse-3 (relay & mechanical)
4x105
6x10'
32
5x10'
2x10°
4x10'
2x10^
1x10"^
1943 — BTL Model 2 (relay)
3x105
5x10°
20
3x10-'
5x10°
2x10'
1x10^
6x10-5
2943 — Colossus (vacuum tube)
6x105
2x10°
10
2x10^
2x10-2
4x10^
2x10'
7x10-3
1943 — BTL Model 3 (relay)
1x10^
2x10'
24
3x10-'
1x10°
6x10'
4x10^
4x10-5
1944 — ASCC (Mark 1) (relay)
2x10^
7x10'
70
3x10'
6x10°
5x10'
5x10^
2x10-5
1945 — Zuse-4 (relay)
3x105
6x10'
32
5x10'
2x10°
4x10'
2x10^
1x10"^
2946 — BTL Model 5 (relay)
3x10^
4x10'
28
3x10'
1x10°
7x10'
1x10^
2x10-5
2946 — ENIAC (vacuum tube)
3x10^
2x10'
40
2x10-^
3x10-^
6x10*
8x10^
2x10-^
2947 — Harvard Mark 2 (relay)
1x10^
1x102
40
2x10'
7x10'
1x10^
4x10^
9x10-5
2948 — IBM SSEC (vacuum tube & relay)
2x10^
8x10°
48
3x10^
2x10-^
1x10"
4x10^
6x10-^
continued
Measuring Computer Power
175
Table 2 (cont.)
Cost
Memory
Word
T^^^
1985$
words
bits
sec
^mult
sec
Power
bits/sec
Capacity
bits
Power/cost
b/s/$
1949 — EDSAC (vacuum tube)
4x105
5x102
35
3x10^
3x10-3
5xW
2x10-*
1x10-'
1950 — SEAC (vacuum tube)
3x10^
1x103
45
2x10"*
2x10-3
8x10-*
5x10"
2x10-2
1951 — UNIVAC I (vacuum tube)
4x10^
1x10^
44
1x10-*
2x10-3
1x105
4x104
3x10-2
1952 — Zuse-5 (relay)
4x1 0^
6x10'
32
1x10-'
5x10-'
2x102
2x103
5x10^
1952 — IBM CPC (vacuum tube & relay)
4x105
9x10°
144
SxlO"*
1x10-^
4x10*
1x103
9x10-2
1953 — IBM 650 (vacuum tube)
8x105
1x103
40
7x10-^
1x10-2
2x10"
4x104
2x10-2
1954 — EDVAC (vacuum tube)
2x10^
1x10^
44
9x10"*
3x10-3
3x1 0^
5x104
2x10-2
1955 — Whirlwind (vacuum tube)
8x105
2x103
16
2x10-5
3x10-5
1x10^
3x104
2x10°
1955 — Librascope LGP-30 (vacuum tube)
1x105
4x103
30
3x10-^
2x10-2
1x10"
1x105
1x10-'
1955 — IBM 704 (vacuum tube)
8x10^
8x103
36
1x10-5
2x10-4
1x10^
3x105
1x10-'
1959 — IBM 7090 (transistor)
1x10^
3x10^
36
4x10-^
2x10-5
7x10^
1x10*
6x10'
1960 — IBM 1620 (transistor)
7x105
2x10^
5
6x10-4
5x10-3
2x104
1x105
3x10-2
I960 — DEC PDP-1
(transistor)
5x105
8x103
18
1x10-5
2x10-5
2x1 0^
1X105
5x10°
1961 —Atlas (transistor)
2xW
4x103
48
1x10-^
5x10-^
3x1 0^
2x105
2x10"
1962 — Burroughs 5000 (transistor)
4x10^
2x10^
13
1x10-5
4x10-5
2x10^
2x105
5x10'
2964 — DEC PDP-6 (transistor)
1x10^
2x10''
36
1x10-5
2x10-5
3x1 0^
6x105
3x10°
continued
176
Mind Children
Table 2 (cont.)
Cost
Memory
Word
1988$
words
bits
*add
sec
^muit
Power
Capacity Power/cost
sec
bits/sec
bits
b/s/$
1964 —
2x107
1965 —
4x105
1966 —
2x107
1967 —
1x10^
1968 —
2x10*
1969 —
3x10^
2970 —
6x10*
1971 —
3x105
1972 —
2x1 0^
1973 —
3x10^
1974 —
4x10"
1975 —
1x10*
1976 —
3x105
1976 —
6x103
1977 —
2x1 0^
1979 —
3x105
CDC 6600 (transistor)
5x105
64
3x10-7
5x10-
2x108
3x107
1x10'
IBM 1130 (hybrid chip)
8x1 0^
16
8x10-*
IBM 360/75 (hybrid chip)
2x10*
32
8x10-7
4x10-5
2x10*
1x105
6x10°
2x10-*
5x107
6x107
3x10°
IBM 360/65 (hybrid chip)
1x10*
32
2x10-*
3x10-*
DEC PDP-10 (integrated circuit)
1x105
36
2x10-*
1x10-5
CDC 7600 (transistor)
1x10*
64
1x10-7
2x10-
GE-635 (transistor)
1x105
32
2x10-*
1x10-
SDS 920 (transistor)
6x10'
32
2x10-5
IBM 360/195 (hybrid chip)
1x105
32
1x10-7
3x10-5
2x10-
Data General Nova (integrated circuit)
8x103
16
2x10-5
4x10-5
IBM-370/168 (integrated circuit)
3x105
32
2x10-7
4x10-7
DEC-KL-10 (integrated circuit)
1x10*
36
8x10-7
2x10-*
DEC PDP-11/70 (integrated circuit)
6x10"
16
3x10-*
9x10-*
Apple II (integrated circuit)
8x103
8
1x10-5
4x10-5
Cray-1
(integrated circuit)
4x10*
64
2xl0-«
2x10-^
DEC VAX 11/780 (microprocessor)
2x10*
32
2x10-*
3x10-*
2x107
3x107
2x10°
1x107
5x10*
8x10°
5xl0«
6x107
2x10'
1X107
4x10*
2x10'^
2x10*
2x10*
7x10°
3x1 0»
4x10*
1x10'
1x10*
1x105
5x10'
2xl0«
8x10*
4x10'
5x107
4x107
5x10'
8x10*
1x10*
3x10'
2x10*
6x10"
3x102
3x10"
3x108
2x10^
2x107
6x107
8x10'
continued
The Outer Limits of Computation
- A table of historical computing power tracks the exponential growth of memory, word size, and processing speed from the Sun-2 to the Cray-3.
- The author posits that a mind is a mathematical pattern that can be instantiated across various physical media without losing its subjective essence.
- The text explores the philosophical conundrum of whether a mind exists as a mathematical abstraction even in the absence of physical hardware.
- A thought experiment suggests that a superintelligent being reading a person's program could simulate that person's existence within its own thoughts.
- This form of mental simulation allows for non-linear processing, such as skipping details or reasoning backwards from a chosen conclusion.
- The distinction between a simulated reality and a fictional narrative blurs when the level of detail in the imagination reaches the threshold of personhood.
Existence in the thoughts of an intelligent beholder is fundamentally no different than existence in a computer simulation, and we have already suggested that a mind can be satisfactorily encoded in a computer.
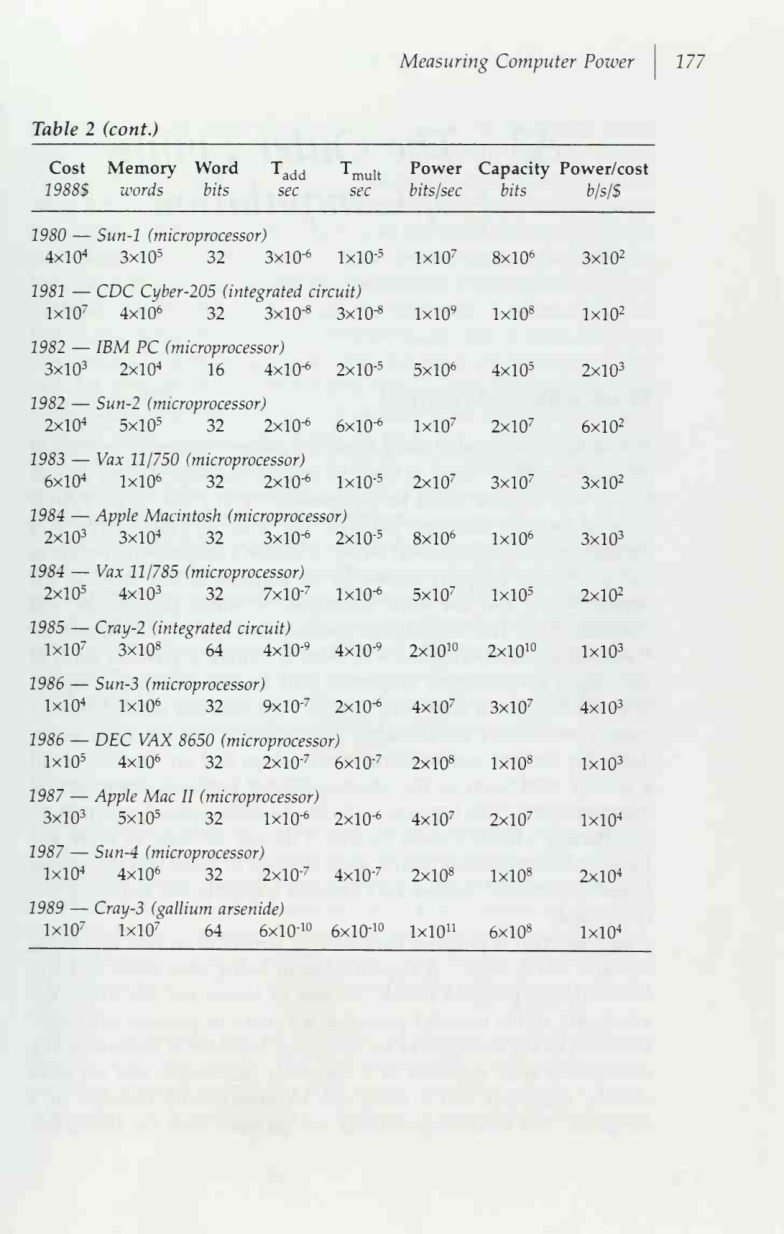
Measuring Computer Power
177
Table 2 (cant.)
Cost
Memory
Word
T^jj
^mult
Power
Capacity Power/cost
2988$
words
bits
sec
sec
bits/sec
bits
b/s/$
2980 — Sun-2 (microprocessor)
4x10^
3x1 05
32
3x10-*
1x10-5
1x107
8x1 0^
3x102
2982 — CDC Cyber-205 (integrated circuit)
1x107
4x10*
32
3x1 0-«
3xl0-«
1x10'
1x108
1x10^
2982 — IBM PC (microprocessor)
3x10^
2x10-*
16
4x10-*
2x10-5
5x10*
4x105
2x103
2982 — Sun-2 (microprocessor)
2x10^
5x10^
32
2x10-*
6x10-*
1x107
2x107
6x1 0^
2983 — Vax 22/750 (microprocessor)
6x10^
1x10^
32
2x10-*
1x10-5
2x107
3x107
3x102
2984 — Apple Macintosh (microprocessor)
2x1 0^
3x10^
32
3x10-*
2x10-5
8x10*
1x10^
3x103
2984 — Vax 22/785 (microprocessor)
2x10^
4x10^
32
7x10-7
1x10-6
5x107
1x105
2x102
2985 — Cray-2 (integrated circuit)
1x107
3xl0«
64
4x10-^
4x10-^
2x10^0
2x10'°
1x103
2956 — Sun-3 (microprocessor)
1x10^
IxlO''
32
9x10-7
2x10-*
4x107
3x107
4x103
1956 — DEC VAX 8650 (microprocessor)
1x1 05
4x10*
32
2x10-7
6x10-7
2xl0»
lxlO«
1X103
2987 — Apple Mac II (microprocessor)
3x10^
5x105
32
1x10^
2x10-*
4x107
2x107
1x10^
1987 — Sun-4 (microprocessor)
1x10*
4x10*
32
2x10-7
4x10-7
2xl0«
1X108
2x10^
2989 — Cra\/'3 (gallium arsenide)
1x107
1x107
64
6x10-'°
6x10-'°
IxlO'i
6x108
IxlC
A3
The Outer Limits
of Computation
Mind without Machine?
In Chapter 4 I suggested that a mind is a pattern that can be impressed
on many different kinds of body or storage medium.
I went further
to say that a mind could be represented by any one of an
infinite
class
of radically
different patterns
that were equivalent only
in a
certain abstract mathematical sense. A person's subjective expenences
are an abstract property shared by
all patterns
in
this
class, so the
person would
feel
the same
regardless
of which
pattern
she was
instantiated
in. This leads to the question that
if a mind
is ultimately
a mathematical abstraction, why does
it require a physical form
at
all?
Don't mathematical properties exist even
if they don't happen
to be written down anywhere?
Doesn't the billionth digit of pi exist
even
if we haven't yet managed to compute
it?
In the same sense,
don't the abstract mathematical relationships that are the feelings of
a person
exist even
in
the absence
of any
particular hardware
to
compute them? This happens to be an old philosophical conundrum;
and though
I think
it must be true,
I do not see how to draw any
meaningful conclusions from it, since it seems to imply that everything
possible exists. So, instead, let's consider a slightly less sweeping line
of thought.
Suppose that a program describing a person
is written in a
static
medium
like a book.
A superintelligent being who reads and un-
derstands the program should be able to reason out the future de-
velopment of the encoded person in a variety of possible situations.
Existence in the thoughts of an intelligent beholder is fundamentally
no different than existence in
a computer simulation, and we have
already suggested
that
a mind
can be
satisfactorily encoded
in
a
computer.
But an intelligent being can do more with the simulation
178
The Outer Limits of Computation
than simply carry
it out rigidly— it need not model accurately every
single detail of the beheld and may well choose to skip the boring
parts, to jump to conclusions that are obvious to
it,
to approximate
other steps, and to lump together alternatives
it does not choose to
distinguish. Human authors of fiction do this every day as they create
adventures
for
the
characters
in
their books—our
superintelligent
being
is different only in that
its imagination works at such a level
of detail that
its simulated people are fully
real.
Like an author of
fiction, the being can think in a time-reversed way;
it may choose a
conclusion and then reason backwards, deciding what must have pre-
ceded
it. Perhaps the superintelligent being prefers to imagine certain
kinds of situations and contrives to maneuver its mental simulations
to make them happen.
By
failing
to
flesh out unimportant details
in the simulation and steering events toward particular conclusions,
our intelligent being may create enough peculiarities in the simulated
world to attract the notice of the simulated person.
Quantum mechanics,
a cornerstone of modern physics, seems to
imply that in the real world as we know it, unobserved events happen
in all possible ways (another way of saying no decision is made as to
which possibility occurs), and the superposition of all these possibili-
ties itself has observable effects, including mysterious coincidences at
remote times and places.
Is there any connection between these ideas?
Once again
I have argued myself into a conundrum, though this time
one that has some possibility of being answered eventually.
Nondeterministic Thinking
The cellular automata universes featured in Chapter 6 have a clock-
work
rigidity
that makes them easy
to think about.
But modern
physics has revealed much more interesting foundations for our own
universe.
Just what
it
all really means
is
still a matter for fascinat-
ing speculation;
the only consensus
is that the truth
is very weird.
The following
is a
little self-indulgence—an attempt
to harness the
strangeness to a practical end. Of course reality will turn out to be far
stranger.
Before computers, serious
scientific calculations were
all
difficult,
lengthy, and error prone.
Practical engineering problems were ap-
proached in an ad hoc manner with numerical tables, graphical meth-
ods, and clever devices like slide rules and, in this century, mechanical
179
Quantum Simulations and Computational Limits
- A superintelligent being might conserve computational resources by failing to flesh out unimportant details in a simulation, potentially revealing its artificial nature.
- Quantum mechanics suggests a reality where unobserved events exist in a superposition of all possible states, creating observable effects like mysterious coincidences.
- The author explores a potential connection between the 'weirdness' of modern physics and the mechanics of universal simulation.
- The advent of automatic computers shifted scientific focus toward computational complexity and the precise specification of step-by-step procedures.
- Mathematical complexity theory distinguishes between 'easy' polynomial-time problems and those whose difficulty grows exponentially with size.
Just what it all really means is still a matter for fascinating speculation; the only consensus is that the truth is very weird.

The Outer Limits of Computation
than simply carry
it out rigidly— it need not model accurately every
single detail of the beheld and may well choose to skip the boring
parts, to jump to conclusions that are obvious to
it,
to approximate
other steps, and to lump together alternatives
it does not choose to
distinguish. Human authors of fiction do this every day as they create
adventures
for
the
characters
in
their books—our
superintelligent
being
is different only in that
its imagination works at such a level
of detail that
its simulated people are fully
real.
Like an author of
fiction, the being can think in a time-reversed way;
it may choose a
conclusion and then reason backwards, deciding what must have pre-
ceded
it. Perhaps the superintelligent being prefers to imagine certain
kinds of situations and contrives to maneuver its mental simulations
to make them happen.
By
failing
to
flesh out unimportant details
in the simulation and steering events toward particular conclusions,
our intelligent being may create enough peculiarities in the simulated
world to attract the notice of the simulated person.
Quantum mechanics,
a cornerstone of modern physics, seems to
imply that in the real world as we know it, unobserved events happen
in all possible ways (another way of saying no decision is made as to
which possibility occurs), and the superposition of all these possibili-
ties itself has observable effects, including mysterious coincidences at
remote times and places.
Is there any connection between these ideas?
Once again
I have argued myself into a conundrum, though this time
one that has some possibility of being answered eventually.
Nondeterministic Thinking
The cellular automata universes featured in Chapter 6 have a clock-
work
rigidity
that makes them easy
to think about.
But modern
physics has revealed much more interesting foundations for our own
universe.
Just what
it
all really means
is
still a matter for fascinat-
ing speculation;
the only consensus
is that the truth
is very weird.
The following
is a
little self-indulgence—an attempt
to harness the
strangeness to a practical end. Of course reality will turn out to be far
stranger.
Before computers, serious
scientific calculations were
all
difficult,
lengthy, and error prone.
Practical engineering problems were ap-
proached in an ad hoc manner with numerical tables, graphical meth-
ods, and clever devices like slide rules and, in this century, mechanical
179
180
Mind Children
calculators. Automatic computers dramatically changed the situation.
Although
they
could
handle
astronomically
large
problems,
they
required, in advance, an absolutely precise and detailed step-by-step
specification of the procedure.
Writing such programs, and getting
them right, was slow and tedious (though not nearly as slow as doing
the calculations themselves by hand).
It was a great advantage
if the
same program could be used
for many problems of the same tvpe,
and often such generalization made the structure of the calculation
I Think, Therefore
I Am
A simulated Descartes correctly deduces his own existence.
It makes
no difference just who or what is doing the simulation— the simulated
world
is complete in
itself.
The Outer Limits of Computation
clearer.
It also spawned the new mathematical field of computational
complexity, the study of the intrinsic difficulty of computing answers
to different kinds of problem.
A
general program can handle problems
of
different
sizes, and
usually
its running time will grow as
its problem size
is increased.
The simplest sorting programs, for instance, take times proportional to
the square of the number of items to be sorted. Doubling the number
of items quadruples the sorting time.
More complicated programs
have been discovered whose times grow more slowly, and students of
computational complexity were able to prove that the fastest possible
sorting programs would require a number of steps proportional to
the number of items times
its logarithm—sorting one million items
should take about about ten thousand times as long as sorting one
thousand items. The time grows faster than the number of items but
not as fast as its square. The difficulty of other kinds of problem was
shown to grow as the cube of the size, or fourth, or some other power.
Problems whose solution can be computed
in times proportional to
(or less than) some fixed power of the problem size are said to be of
polynomial time, or P, type.
In the computer era they are considered
easy.
Another important class of computations turned out to be much
harder. One example is the so-called traveling-salesma7i problem, which
involves finding the shortest path that passes through each of a given
set of cities exactly once.
The best exact solutions that anyone has
found require that the program check almost every possible route,
then
pick
the
best
one.
The
possible
routes
are enumerated by
generating
all permutations
of the
cities.
Each permutation
itself
can be checked in polynomial time, but the number of permutations
grows exponentially, multiplying manyfold each time a single city
is
added. The problem becomes astronomically difficult for quite modest
numbers of cities. A hypothetical computer able to explore all possible
paths simultaneously
(a mere mathematical abstraction known as a
nondeterministic machine because
it does not make up
its mind
at
branchpoints but splits into two machines and goes both ways) could,
in principle, solve the problem in polynomial time.
For that reason
these hard problems are called NP, for nondeterministic polynomial.
It turns out that many NP problems can be mathematically converted
into one another, and that a fast (P) solution for one would solve all.
Alas, no
fast solution
that works on a
real, deterministic computer
181
The NP-Completeness Challenge
- The traveling-salesman problem exemplifies NP problems where the number of possible solutions grows exponentially with each added variable.
- A theoretical nondeterministic machine could solve these problems in polynomial time by splitting into multiple versions of itself at every branch point.
- The P=NP? question remains one of the most significant unsolved problems in computer science, affecting hardware design and automatic reasoning.
- Current design systems rely on approximate methods because exact solutions for NP problems are computationally impossible for conventional machines.
- Future superintelligences may overcome these limits by physically replicating small computing units to act as a massive, real-world multiprocessor.
- The ultimate limit to this computational strategy is the availability of matter and energy, potentially utilizing entire oceans or interstellar clouds.
A hypothetical computer able to explore all possible paths simultaneously (a mere mathematical abstraction known as a nondeterministic machine because it does not make up its mind at branchpoints but splits into two machines and goes both ways) could, in principle, solve the problem in polynomial time.
The Outer Limits of Computation
clearer.
It also spawned the new mathematical field of computational
complexity, the study of the intrinsic difficulty of computing answers
to different kinds of problem.
A
general program can handle problems
of
different
sizes, and
usually
its running time will grow as
its problem size
is increased.
The simplest sorting programs, for instance, take times proportional to
the square of the number of items to be sorted. Doubling the number
of items quadruples the sorting time.
More complicated programs
have been discovered whose times grow more slowly, and students of
computational complexity were able to prove that the fastest possible
sorting programs would require a number of steps proportional to
the number of items times
its logarithm—sorting one million items
should take about about ten thousand times as long as sorting one
thousand items. The time grows faster than the number of items but
not as fast as its square. The difficulty of other kinds of problem was
shown to grow as the cube of the size, or fourth, or some other power.
Problems whose solution can be computed
in times proportional to
(or less than) some fixed power of the problem size are said to be of
polynomial time, or P, type.
In the computer era they are considered
easy.
Another important class of computations turned out to be much
harder. One example is the so-called traveling-salesma7i problem, which
involves finding the shortest path that passes through each of a given
set of cities exactly once.
The best exact solutions that anyone has
found require that the program check almost every possible route,
then
pick
the
best
one.
The
possible
routes
are enumerated by
generating
all permutations
of the
cities.
Each permutation
itself
can be checked in polynomial time, but the number of permutations
grows exponentially, multiplying manyfold each time a single city
is
added. The problem becomes astronomically difficult for quite modest
numbers of cities. A hypothetical computer able to explore all possible
paths simultaneously
(a mere mathematical abstraction known as a
nondeterministic machine because
it does not make up
its mind
at
branchpoints but splits into two machines and goes both ways) could,
in principle, solve the problem in polynomial time.
For that reason
these hard problems are called NP, for nondeterministic polynomial.
It turns out that many NP problems can be mathematically converted
into one another, and that a fast (P) solution for one would solve all.
Alas, no
fast solution
that works on a
real, deterministic computer
181
182
Mind Children
has been found, and
it
is not known
if such a solution exists.
This
so called P=NP? question
is a central one because some extremely
important problems, for instance in the design of optimal hardware
and software, and automatic reasoning, are NP. Since exact solutions
are much, much too slow, present design systems limp along with
approximate methods
that do not guarantee the best answer, and
sometimes do quite badly.
Let's suppose,
as seems
likely,
that
there
is no
shortcut
to NP
problems.
No matter how
fast
the conventional machine we use
to solve them, small increases in problem size will swamp
it.
An
intelligence designing improvements for itself will encounter many NP
issues. The efficiency of its designs, and thus its future, will depend
directly on how well
it can handle these problems, so heroic methods
are warranted.
Replication and Quantum Nondeterminism
A nondeterministic computer, able to spawn indefinitely many ver-
sions of itself to examine alternative answers, is a mathematical fabri-
cation.
It can be approximated, to a limited extent, by a multiprocessor
that contains a fixed number of distinct processors. At each branch-
point
in the computation
a new processor
is invoked.
Eventually,
however, the last processor will be occupied, and subsequent branches
must be evaluated sequentially. The computation can be sped up only
by as many times as there are individual processors, making hardly
a dent in the astronomical growth rate of NP problems.
But what
if
the number of processors could somehow be increased as the problem
size grew?
The ability to reproduce is a sine qua non for the members of any
race that aspires to immortality.
Our machines do
it now, though
biological humans are an essential part of the process. As the future
portrayed in this book dawns, more and more of the steps will be taken
over by machines,
until
fully automatic manufacture of automatic
manufacturing machines
is the norm.
In the superintelligent future,
reproduction of small thinking units will be child's play.
It
is thus
reasonable to imagine small computers that can both compute and
make copies of themselves. Reproduction eventually is limited by the
finite amount of available material and energy, but the limits could
be made astronomically high by breeding very small machines in a
The Outer Limits of Computation
very large, energetic nutrient medium (bacteria-sized machines in the
oceans of Jupiter, or in pulsar-pumped interstellar dust clouds,
let's
say!). One such computer would reproduce, to become two, the two
would become four, the four eight, the eight sixteen, and so on, in an
exponential growth to astronomical numbers matching, up to a point,
the exponential growth of an NP problem.
If,
in one "generation"
time step, a machine can do either a certain amount of computation
or reproduce itself once, the best strategy would be to reproduce like
mad
until there are as many machines as there are alternatives
to
examine, then for each resulting machine to examine one alternative
answer.
Having computed a possible answer, the machines would
then engage in a "mine's bigger than yours" tournament with nearby
machines. Two machines would compare each other's answers, and
then both would adopt the better of the two results and go
off to
compete with other machines.
The best answer will rapidly spread
to
all
the machines, and any one can
then be harvested
to
learn
the
final
result.
In
this
process,
the
reproduction phase
takes
a
time linearly proportional to the size of the problem; working out
the individual answers
is polynomial
in
the
size, and
the answer
tournament phase, like the reproduction, is linear in the size, allowing
moderately sized NP problems to be solved in polynomial time. But
very large problems would swamp any amount of available space
and would thus still be out of reach.
(Earth's biosphere, of course,
is
performing a computation of just this kind.)
Truly nondeterministic computers are a mathematical
fiction.
Or
are they? Quantum mechanics, a cornerstone of modern physics, has
indeterminism at its heart and soul. Outcome probabilities in quantum
mechanics
are
predicted by summing up
all
the
indistinguishable
ways an event might happen, then squaring the result. One strange
consequence of this is that some otherwise possible outcomes are ruled
out by the existence of other possibilities. An excellent example is the
two-slit experiment. Photons of light radiate from a pinpoint source to
a screen broken by two slits, as in the figure on page 184. Those that
make it through the slits encounter an array of photon detectors (often
a photographic film, but the example
is clearer
if we use individual
sensors
that
click when struck by
light).
If the
light source
is so
dim that only one photon
is released
at a time, the sensors register
individually—sometimes this one, sometimes that one. Each photon
lands in exactly one place. But, if a count is kept of how many photons
183
Quantum Computation and Exponential Growth
- A hypothetical machine strategy for solving NP problems involves exponential self-reproduction to match the problem's complexity.
- The proposed process includes a reproduction phase, an individual computation phase, and a 'tournament' phase to find the best result.
- While this method could solve moderately sized NP problems in polynomial time, physical space constraints limit its application to very large problems.
- The author suggests that Earth's biosphere is currently performing a massive computation using this exact reproductive strategy.
- Quantum mechanics offers a potential real-world basis for nondeterministic computing through the principle of superposition and interference.
- The two-slit experiment demonstrates how quantum particles exist in multiple states simultaneously, as the presence of an alternative path changes the final outcome.
If, in one 'generation' time step, a machine can do either a certain amount of computation or reproduce itself once, the best strategy would be to reproduce like mad until there are as many machines as there are alternatives to examine.
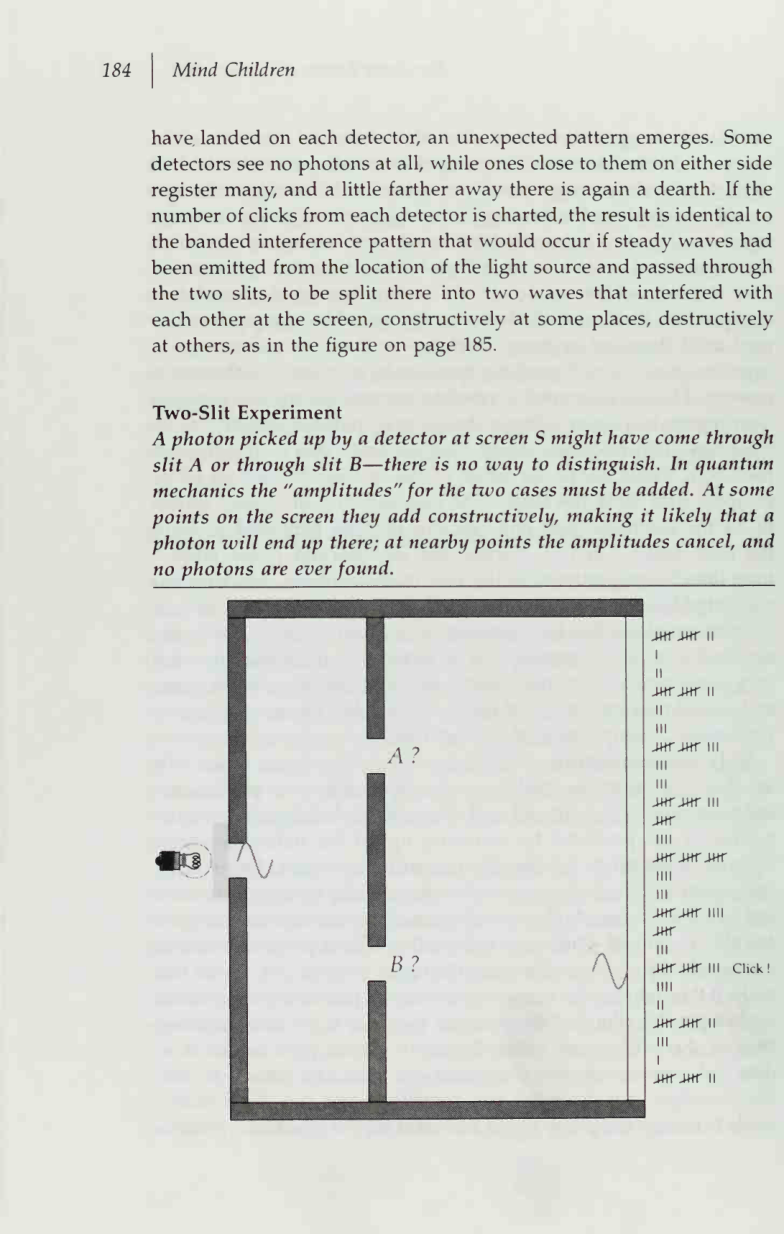
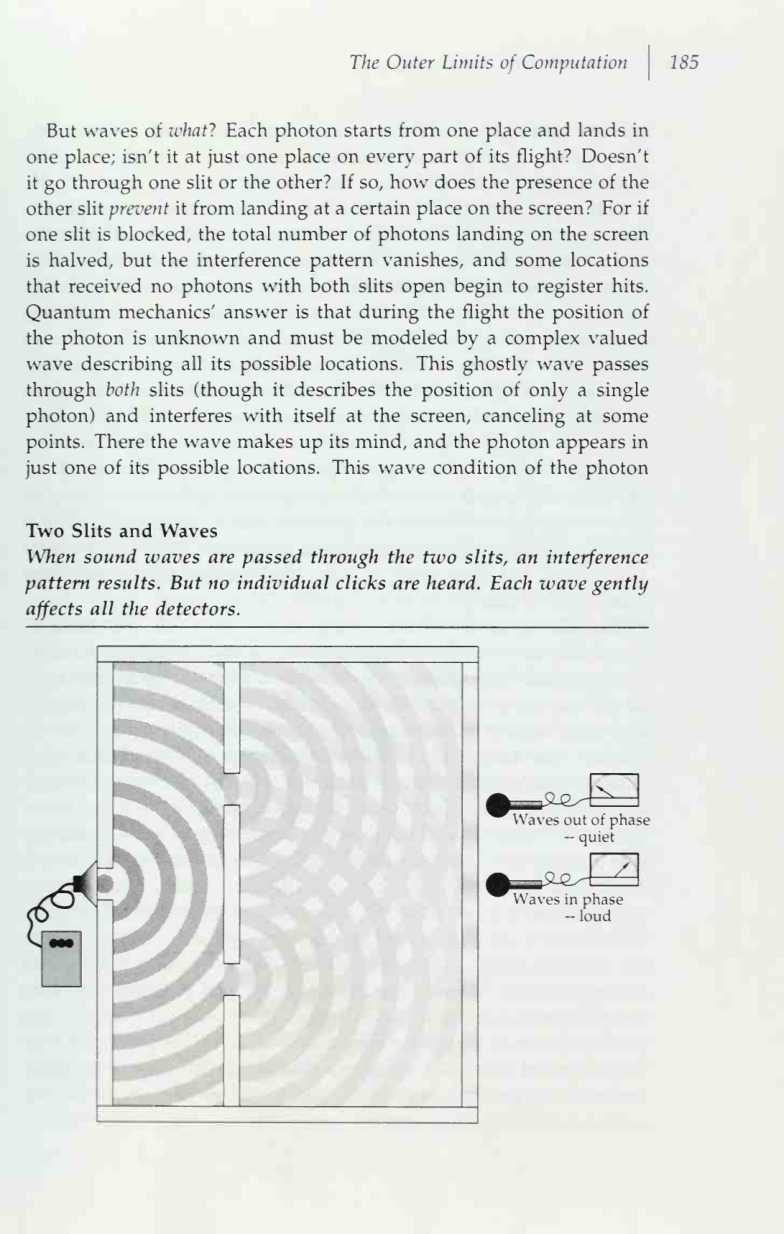
The Outer Limits of Computation
very large, energetic nutrient medium (bacteria-sized machines in the
oceans of Jupiter, or in pulsar-pumped interstellar dust clouds,
let's
say!). One such computer would reproduce, to become two, the two
would become four, the four eight, the eight sixteen, and so on, in an
exponential growth to astronomical numbers matching, up to a point,
the exponential growth of an NP problem.
If,
in one "generation"
time step, a machine can do either a certain amount of computation
or reproduce itself once, the best strategy would be to reproduce like
mad
until there are as many machines as there are alternatives
to
examine, then for each resulting machine to examine one alternative
answer.
Having computed a possible answer, the machines would
then engage in a "mine's bigger than yours" tournament with nearby
machines. Two machines would compare each other's answers, and
then both would adopt the better of the two results and go
off to
compete with other machines.
The best answer will rapidly spread
to
all
the machines, and any one can
then be harvested
to
learn
the
final
result.
In
this
process,
the
reproduction phase
takes
a
time linearly proportional to the size of the problem; working out
the individual answers
is polynomial
in
the
size, and
the answer
tournament phase, like the reproduction, is linear in the size, allowing
moderately sized NP problems to be solved in polynomial time. But
very large problems would swamp any amount of available space
and would thus still be out of reach.
(Earth's biosphere, of course,
is
performing a computation of just this kind.)
Truly nondeterministic computers are a mathematical
fiction.
Or
are they? Quantum mechanics, a cornerstone of modern physics, has
indeterminism at its heart and soul. Outcome probabilities in quantum
mechanics
are
predicted by summing up
all
the
indistinguishable
ways an event might happen, then squaring the result. One strange
consequence of this is that some otherwise possible outcomes are ruled
out by the existence of other possibilities. An excellent example is the
two-slit experiment. Photons of light radiate from a pinpoint source to
a screen broken by two slits, as in the figure on page 184. Those that
make it through the slits encounter an array of photon detectors (often
a photographic film, but the example
is clearer
if we use individual
sensors
that
click when struck by
light).
If the
light source
is so
dim that only one photon
is released
at a time, the sensors register
individually—sometimes this one, sometimes that one. Each photon
lands in exactly one place. But, if a count is kept of how many photons
183
184
Mind Children
have, landed on each detector, an unexpected pattern emerges. Some
detectors see no photons at all, while ones close to them on either side
register many, and a
little farther away there is again a dearth.
If the
number of clicks from each detector is charted, the result is identical to
the banded interference pattern that would occur if steady waves had
been emitted from the location of the light source and passed through
the two
slits,
to be
split there
into two waves
that interfered with
each other at the screen, constructively at some places, destructively
at others, as in the figure on page 185.
Two-Slit Experiment
A photon picked up by a detector at screen S might have come through
slit A or through slit B— there
is no way to distinguish. In quantum
mechanics the "amplitudes" for the two cases must be added. At some
points on the screen they add constructively, making it likely that a
photon will end up there; at nearby points the amplitudes cancel, and
no photons are ever found.
j+trj+tr
II
The Outer Limits of Computation
185
But waves of what? Each photon starts from one place and lands in
one place; isn't
it at just one place on every part of its flight? Doesn't
it go through one slit or the other?
If so, how does the presence of the
other slit prroent it from landing at a certain place on the screen? For if
one slit is blocked, the total number of photons landing on the screen
is halved, but the interference pattern vanishes, and some locations
that received no photons with both
slits open begin to register
hits.
Quantum mechanics' answer is that during the tlight the position of
the photon
is unknown and must be modeled bv a complex valued
wave describing
all
its possible locations.
This ghostlv wave passes
through both
slits (though
it describes the position of only a single
photon) and
interferes with
itself
at
the
screen,
canceling
at some
points. There the wave makes up its mind, and the photon appears in
just one of its possible locations.
This wave condition of the photon
Two Slits and Waves
When sound waves are passed through the two slits, an interference
pattern results. But no individual clicks are heard. Each wave gently
affects all the detectors.
^^
Waves out of phase
— quiet
Waves in phase
- loud
Quantum Superposition and Many Worlds
- Quantum mechanics describes particles as complex-valued waves that exist in a superposition of all possible locations until a measurement causes the wave function to collapse.
- The 'hidden-variables' theory, supported by Einstein and Schrodinger, argued that quantum states are definite but simply unknown to the observer.
- Modern experiments by Alain Aspect have largely ruled out local hidden-variable theories, confirming the 'absurd' non-local nature of quantum mechanics.
- Schrodinger's Cat was originally a thought experiment intended to highlight the perceived absurdity of a system being in a mixed state of both alive and dead.
- Hugh Everett's 'Many Worlds' interpretation suggests that instead of a wave collapse, the universe branches into different realities at every decision point.
Schrodinger considered absurd the theory's description of the unopened box as a mixed state superimposing a live and a dead cat.
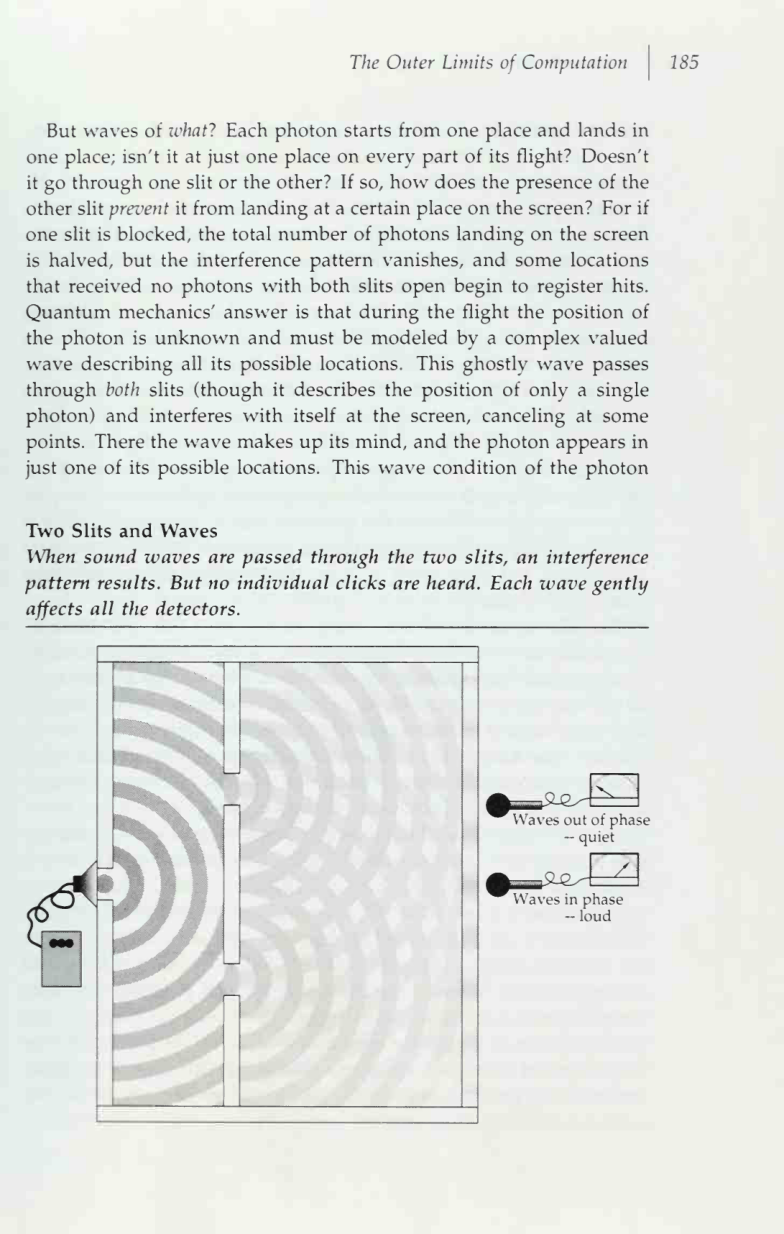
The Outer Limits of Computation
185
But waves of what? Each photon starts from one place and lands in
one place; isn't
it at just one place on every part of its flight? Doesn't
it go through one slit or the other?
If so, how does the presence of the
other slit prroent it from landing at a certain place on the screen? For if
one slit is blocked, the total number of photons landing on the screen
is halved, but the interference pattern vanishes, and some locations
that received no photons with both
slits open begin to register
hits.
Quantum mechanics' answer is that during the tlight the position of
the photon
is unknown and must be modeled bv a complex valued
wave describing
all
its possible locations.
This ghostlv wave passes
through both
slits (though
it describes the position of only a single
photon) and
interferes with
itself
at
the
screen,
canceling
at some
points. There the wave makes up its mind, and the photon appears in
just one of its possible locations.
This wave condition of the photon
Two Slits and Waves
When sound waves are passed through the two slits, an interference
pattern results. But no individual clicks are heard. Each wave gently
affects all the detectors.
^^
Waves out of phase
— quiet
Waves in phase
- loud
186
Mind Children
before it hits the screen is called a mixed state or a superposition of states.
The sudden appearance of the photon in only one detector
is called
the collapse of the wave function.
This explanation profoundly disturbed some of the same physicists
who had
helped
to formulate
the
theory,
notably
Albert
Einstein
and Erwin Schrodinger.
To formalize their intuitive objections, they
constructed thought experiments that gave unlikely results according
to
the
theory.
In some,
a measurement made
at one
site caused
the
instant
collapse
of
a wave
function
at
a remote
location—an
effect faster than
light.
In another, more frivolous, example,
called
Schrodinger's Cat, a radioactive decay that may or may not take place
in a sealed box causes (or fails to cause) the death of a cat also in the
box.
Schrodinger considered absurd the theory's description of the
unopened box as a mixed state superimposing a live and a dead cat.
He suggested that the theory merely expressed ignorance on the part
of an observer:
in the box the cat's fate was unambiguous.
This
is
called a hidden-variables theory; that is, the system has a definite state
at
all times, but some parts of
it are temporarily hidden from some
observers.
The joke
is on
the
critics.
Many
of
the most "absurd" thought
experimental results have been observed
in mind-boggling actuality
in clever (and very modern) experiments carried out by Alain Aspect
at the University of Paris. These demonstrations rule out the simplest
and most natural hidden variables theories, local ones, in which, for
instance, the hidden information about which
slit the photon went
through
is contained
in the photon
itself, or ones in which the state
of health of Schrodinger's cat is part of the fehne.
Nonlocal hidden-variables theories, where the unmeasured informa-
tion is distributed over an extended space, are a possibility.
It is easy to
construct theories of this kind that give results identical with ordinary
quantum mechanics.
Most physicists find them uninteresting: why
introduce a more complicated explanation with extra variables when
the current, simpler equations suffice?
Philosophically,
also, global
hidden-variables
theories
are only
slightly
less puzzling than raw
quantum mechanics. What does it mean that the "exact position" of a
particle is spread out over a large chunk of space? This question was
the subject of a lively controversy among the founders of quantum
mechanics in the early part of this century.
It has recently become of
widespread interest again.
The Outer Limits of Computation
Many Worlds and the Doomsday NP Computer
In
the
two-slit experiment,
a photon destined
for the screen might
go through sht A or
it might traverse sHt B. The interference pattern
suggests
it somehow manages to do both at the same time.
In 1957
Hugh
Everett
at Princeton published
in
his PhD
thesis what may
be the most profligate nonlocal hidden-variables explanation of this
puzzle.
In Everett's model, the photon does go through both
slits,
in
different
universes.
At each decision point the entire universe, or
at least the immediate portion of
it, splits into several, like multiple
pages from a copying machine.
Until a measurement
is made, the
different versions of the universe lie in close proximity and interfere
with each other, causing banded patterns on screens, for instance. A
measurement that can distinguish one possibility from another causes
the universes to diverge (alternatively, the divergence is the definition
of "measurement"). The interference stops, and in each, now separate,
universe a
different version of the experimenter can contemplate a
different unambiguous result.
The word "astronomical" hardly begins to capture the number of
distinct universes created every instant under this idea. Such numbers
alone may make
the thought unappealing,
vet we should
not be
intimidated by mere
scale.
Shock also greeted the
first suggestions
of the number of atoms in a speck of matter, or the distance to the
nearest stars, or the size and age of the universe.
Practical physicists
object to the profligacy of universes for a different reason.
Once a
measurement
is made, the universes in which the result was other
than our own no longer influence
us.
Postulating
their continued
existence
is an unnecessary complication.
Thus stripped, the manv-
worlds
idea
is reduced
to conventional quantum mechanics.
The
unnecessary hidden variables
(that identify which universe you are
talking about) are removed.
Can quantum mechanical indeterminism help solve difficult prob-
lems?
So-called holographic methods have been demonstrated that
use coherent laser light to simultaneously search for certain patterns
(fingerprints, or enemy radar signals,
for instance)
in large fields of
other patterns.
For the right problem, holographic methods are fast
and efficient, and the action can be interpreted as the effect of mixed
states.
It can also be viewed
in a more classical way as light-wave
interference. Waves are interesting because their spread
is a kind of
187
The Many-Worlds Divergence
- Quantum measurements cause the universe to split into multiple separate versions that no longer interfere with one another.
- The sheer scale of these infinite universes is often dismissed by physicists as an unnecessary complication to standard quantum mechanics.
- Holographic methods and mixed states offer some computational speedups, but have yet to solve the fundamental difficulty of NP problems.
- The many-worlds theory suggests a form of quantum immortality or survival bias where observers only exist in universes where catastrophe was avoided.
- A fictional scenario illustrates this by showing physicists who survive only because their universe-destroying machine keeps failing by 'bad luck.'
- The idea implies that even if a cosmic disaster occurs in most branches, consciousness persists in the remaining viable timelines.
The word 'astronomical' hardly begins to capture the number of distinct universes created every instant under this idea.
The Outer Limits of Computation
Many Worlds and the Doomsday NP Computer
In
the
two-slit experiment,
a photon destined
for the screen might
go through sht A or
it might traverse sHt B. The interference pattern
suggests
it somehow manages to do both at the same time.
In 1957
Hugh
Everett
at Princeton published
in
his PhD
thesis what may
be the most profligate nonlocal hidden-variables explanation of this
puzzle.
In Everett's model, the photon does go through both
slits,
in
different
universes.
At each decision point the entire universe, or
at least the immediate portion of
it, splits into several, like multiple
pages from a copying machine.
Until a measurement
is made, the
different versions of the universe lie in close proximity and interfere
with each other, causing banded patterns on screens, for instance. A
measurement that can distinguish one possibility from another causes
the universes to diverge (alternatively, the divergence is the definition
of "measurement"). The interference stops, and in each, now separate,
universe a
different version of the experimenter can contemplate a
different unambiguous result.
The word "astronomical" hardly begins to capture the number of
distinct universes created every instant under this idea. Such numbers
alone may make
the thought unappealing,
vet we should
not be
intimidated by mere
scale.
Shock also greeted the
first suggestions
of the number of atoms in a speck of matter, or the distance to the
nearest stars, or the size and age of the universe.
Practical physicists
object to the profligacy of universes for a different reason.
Once a
measurement
is made, the universes in which the result was other
than our own no longer influence
us.
Postulating
their continued
existence
is an unnecessary complication.
Thus stripped, the manv-
worlds
idea
is reduced
to conventional quantum mechanics.
The
unnecessary hidden variables
(that identify which universe you are
talking about) are removed.
Can quantum mechanical indeterminism help solve difficult prob-
lems?
So-called holographic methods have been demonstrated that
use coherent laser light to simultaneously search for certain patterns
(fingerprints, or enemy radar signals,
for instance)
in large fields of
other patterns.
For the right problem, holographic methods are fast
and efficient, and the action can be interpreted as the effect of mixed
states.
It can also be viewed
in a more classical way as light-wave
interference. Waves are interesting because their spread
is a kind of
187
188
Mind Children
reproduction, and different parts of a waveform can be used to per-
form different parts of a computation. But as yet only linear speedups
have been proposed or achieved. NP problems remain difficult.
But the many-worlds idea has other consequences.
John Gribbin
is
a
writer and
physicist who
has expanded on
its more
bizarre
possibilities in several stories, articles, and books. One of his stories
has the following plot.
The Doomsday Device
Two builders
of a future super (immensely expensive)
particle accelerator
have a problem.
The machine has been completed for months, but so far
has failed on each attempt
to use
it.
The problem
is not in the design but
seemingly just in the designer's bad luck.
Lightning caused a power outage
just at turn on, or a fuse blew, or a janitor tripp^ed over a cable, or a
little
earthquake triggered an emergency cutoff; each incident was different, and
apparently unrelated to the others.
But perhaps the failures are an enormous stroke of luck. New calculations
suggest
that
the machine
is powerful enough
to
trigger a
collapse of the
vacuum to a lower energy state. A cosmic explosion might radiate out at the
speed of light from the accelerator's collision point, eventually destroying the
entire universe.
Wliat a close call!
Or was it?
If the universe had been destroyed, there would be no o}ie left
to lament
the fact.
Wliat
if the many-worlds
idea were correct?
In some
universes the machine would have worked.
For all practical purposes those
worlds would have ceased
to exist.
Only in the remaitider would a pair of
puzzled physicists be scratching their heads, zvondering what had gone wrong
this time. Given so many nearly identical uniz^erses, the destruction of a few
seems of small consequence. An
idea
strikes them.
Wliy not reinforce the
weak points in the machine so that a random failure within
it
is extremely
unlikely,
then wire
it
to a detector of a nuclear attack,
like the doomsday
machine
in Stanley Kubrick's film
Dr. Strangelove.^
Ati attack would be
met by the destruction of the offending universe.
Only those universes
in
which the attack had not happened, for some reason (the commanding general
had a heart attack,
the missile launch system failed,
the piremier had a
fit
of compassion...), would
live
to wonder about yet another close
call.
The
machine in Strangelove was ineffective as a deterrent unless the other side
was aware of it. Not so the many-worlds version. No attack (that anyone will
notice) can occur so long as
it operates, no matter how secret
its existence.
The Doomsday Computer
- The author proposes a theoretical 'doomsday machine' based on the many-worlds interpretation of quantum mechanics to prevent nuclear war by destroying any universe where an attack occurs.
- This concept is extended to solving NP-complete problems, like the traveling-salesman problem, by wiring a computer to a universe-destroying device.
- By programming the device to trigger if a computer finds a sub-optimal solution, only universes where the computer finds the correct answer are allowed to persist.
- A binary search strategy can be used to find optimal solutions in polynomial time, effectively turning a conventional computer into a nondeterministic one.
- The ethical and physical cost is the destruction of a staggering number of alternative universes for every one that survives with an answer.
- While the growth rate of new universes might accommodate this, the method relies on the literal reality of branching quantum timelines.
An attack would be met by the destruction of the offending universe.
188
Mind Children
reproduction, and different parts of a waveform can be used to per-
form different parts of a computation. But as yet only linear speedups
have been proposed or achieved. NP problems remain difficult.
But the many-worlds idea has other consequences.
John Gribbin
is
a
writer and
physicist who
has expanded on
its more
bizarre
possibilities in several stories, articles, and books. One of his stories
has the following plot.
The Doomsday Device
Two builders
of a future super (immensely expensive)
particle accelerator
have a problem.
The machine has been completed for months, but so far
has failed on each attempt
to use
it.
The problem
is not in the design but
seemingly just in the designer's bad luck.
Lightning caused a power outage
just at turn on, or a fuse blew, or a janitor tripp^ed over a cable, or a
little
earthquake triggered an emergency cutoff; each incident was different, and
apparently unrelated to the others.
But perhaps the failures are an enormous stroke of luck. New calculations
suggest
that
the machine
is powerful enough
to
trigger a
collapse of the
vacuum to a lower energy state. A cosmic explosion might radiate out at the
speed of light from the accelerator's collision point, eventually destroying the
entire universe.
Wliat a close call!
Or was it?
If the universe had been destroyed, there would be no o}ie left
to lament
the fact.
Wliat
if the many-worlds
idea were correct?
In some
universes the machine would have worked.
For all practical purposes those
worlds would have ceased
to exist.
Only in the remaitider would a pair of
puzzled physicists be scratching their heads, zvondering what had gone wrong
this time. Given so many nearly identical uniz^erses, the destruction of a few
seems of small consequence. An
idea
strikes them.
Wliy not reinforce the
weak points in the machine so that a random failure within
it
is extremely
unlikely,
then wire
it
to a detector of a nuclear attack,
like the doomsday
machine
in Stanley Kubrick's film
Dr. Strangelove.^
Ati attack would be
met by the destruction of the offending universe.
Only those universes
in
which the attack had not happened, for some reason (the commanding general
had a heart attack,
the missile launch system failed,
the piremier had a
fit
of compassion...), would
live
to wonder about yet another close
call.
The
machine in Strangelove was ineffective as a deterrent unless the other side
was aware of it. Not so the many-worlds version. No attack (that anyone will
notice) can occur so long as
it operates, no matter how secret
its existence.
The Outer Limits of Computation
189
Preventing nuclear war
is a laudable objective perhaps worth the
destruction
of untold numbers
of possible universes.
But can we
use the same approach to solve day-to-day problems?
Getting back
to the NP problem, could
parallel universes somehow be used
to
search
alternative
possible
solutions
simultaneously,
allowing one
conventional computer to act like a nondeterministic one? Let's begin
by wiring a universe-destroying device to a computer, so that
it can
be
activated by
a
certain computer
instruction.
While we
are
at
it,
let's also connect a
true random number generator, based on
a
hiss from a hot
resistor or
clicks from a geiger counter.
Potential
solutions to NP problems are characterized by a number, for instance
the total path length in the traveling-salesman problem, that we seek
to minimize.
Guess
a
probable
length,
and
write
a program
to
choose a path
at random (using the generator you added).
Have
the program trigger the doomsday device
if the randomly generated
path
is longer than your guess. Run the program.
Most likely you
will find that the random path your program has generated is shorter
than your guess, because universes in which a longer path came up
are wiped out.
But suppose there
is no path that short.
Well, then
your computer must have broken somehow and failed to destroy the
universe.
It
is a nuisance to have your computer break in an uncontrolled
way, so why not provide an easily fixed weak link?
Install another
thermally or radioactively controlled device that, with low probability,
can interrupt your computer's calculation.
If you run your program
now,
it will either produce an answer shorter than your guess, or else
be interrupted before
it finishes.
In the former case, choose a shorter
path length; in the latter, choose a longer one. Then run the program
again. Keep doing this until you find a path length L such that the
machine finds an answer with a guess of L, but interrupts itself when
the guess
is L-1. The L-length solution
is an optimal answer to your
problem. The search for a proper L can, of course, be incorporated into
the program
itself to make the process fully automatic. An optimal
strategy for doing
this,
called
a binary search, can
finish the search
in a number of steps proportional to the logarithm of L, a mere 20
steps when L
is a million. Each step, which involves generating each
random answer, takes polynomial time. So the answer is yes, a many-
worlds version of quantum mechanics can be used to solve arbitrarily
hard NP problems in modest times.
190
Mind Children
The
cost
in destroyed universes
is
staggering,
however.
In
the
nuclear-war-preventing use of the doomsday device,
if the annual
chance of an attack were 50%, about half of the possible universes
would be destroyed each year.
But in a traveling-salesman problem
with 100 cities only a few solutions out of 100^"^ (a
1 followed by 200
zeros) will be optimum, so a doomsday computer solving the problem
would destroy about 100'°^ worlds for each one
it
let survive!
The
growth rate of new universes
is much larger than that, so perhaps
it
does not matter.
Only one component of
this solution
to the NP problem cannot
be immediately constructed today, and that
is the doomsday trigger
itself.
Gribbin's design depends on highly speculative physics that
has lost favor as of this writing.
But
is
it really necessary to destroy
the whole universe
if the answer comes out wrong?
Of course not.
Subjectively,
it
is just as good to merely destroy yourself! Now that
outcome can be achieved
today.
Wire your computer's doomsday
connection to a cranial explosive charge, for instance.
If you run the
traveling-salesman program you will, with overwhelming odds, blow
your brains out.
But
it's quick and should be painless. And, in one
world out of 100^°^, you will, by a tremendous stroke of luck, survive
and have the right answer. Your cranial explosive will be intact, ready
to solve the next problem.
The above idea would work with other problems
of
life.
If an
outcome you desire, however unlikely,
fails
to materialize, destroy
yourself.
In some universe, vou will survive, having won your bet.
If the many-worlds interpretation of quantum mechanics
is correct,
as
it might
be, why
isn't suicide
a common
solution
to everyday
problems? The demographics of multiple universes may have some
bearing on the answer.
If you are careless about losing your life, there
will be fewer copies of you among the universes. A universe picked
at random will contain mostly individuals who successfully struggle
to avoid death whenever possible.
If the universes are truly infinite
in number, this has little meaning—one trillionth of infinity is still the
same infinity. The consequences are serious, however,
if the number
is merely huge. And
if not all possible outcomes are pursued, then
destroying yourself with high probability could, in fact, truly end your
existence.
Quantum Suicide and Wave Models
- The author explores the 'doomsday trigger' concept, suggesting that quantum suicide could theoretically solve NP-complete problems by ensuring survival only in universes where the correct answer is found.
- This radical application of the many-worlds interpretation implies that one could achieve any unlikely desired outcome by destroying themselves in all branches where they fail.
- The demographic argument against frequent quantum suicide suggests that individuals who avoid death exist in a higher proportion of universes than those who are careless with their lives.
- The text questions the validity of the many-worlds theory, proposing that quantum uncertainty might instead be 'noise' from a single, finite universe.
- A mathematical model using Fourier transforms is introduced to describe how wave modes and particle density within a spherical volume might represent universal physical limits.
Wire your computer's doomsday connection to a cranial explosive charge, for instance.
190
Mind Children
The
cost
in destroyed universes
is
staggering,
however.
In
the
nuclear-war-preventing use of the doomsday device,
if the annual
chance of an attack were 50%, about half of the possible universes
would be destroyed each year.
But in a traveling-salesman problem
with 100 cities only a few solutions out of 100^"^ (a
1 followed by 200
zeros) will be optimum, so a doomsday computer solving the problem
would destroy about 100'°^ worlds for each one
it
let survive!
The
growth rate of new universes
is much larger than that, so perhaps
it
does not matter.
Only one component of
this solution
to the NP problem cannot
be immediately constructed today, and that
is the doomsday trigger
itself.
Gribbin's design depends on highly speculative physics that
has lost favor as of this writing.
But
is
it really necessary to destroy
the whole universe
if the answer comes out wrong?
Of course not.
Subjectively,
it
is just as good to merely destroy yourself! Now that
outcome can be achieved
today.
Wire your computer's doomsday
connection to a cranial explosive charge, for instance.
If you run the
traveling-salesman program you will, with overwhelming odds, blow
your brains out.
But
it's quick and should be painless. And, in one
world out of 100^°^, you will, by a tremendous stroke of luck, survive
and have the right answer. Your cranial explosive will be intact, ready
to solve the next problem.
The above idea would work with other problems
of
life.
If an
outcome you desire, however unlikely,
fails
to materialize, destroy
yourself.
In some universe, vou will survive, having won your bet.
If the many-worlds interpretation of quantum mechanics
is correct,
as
it might
be, why
isn't suicide
a common
solution
to everyday
problems? The demographics of multiple universes may have some
bearing on the answer.
If you are careless about losing your life, there
will be fewer copies of you among the universes. A universe picked
at random will contain mostly individuals who successfully struggle
to avoid death whenever possible.
If the universes are truly infinite
in number, this has little meaning—one trillionth of infinity is still the
same infinity. The consequences are serious, however,
if the number
is merely huge. And
if not all possible outcomes are pursued, then
destroying yourself with high probability could, in fact, truly end your
existence.
The Outer Limits of Computation
191
One World, Not Many?
It may be
that the indeterminate nature of quantum mechanics
is
simply a kind
of illusion and
that there
is only one world.
Here
is an outline of a model where the uncertainties at any location, or the
hidden variables, are simply "noise" from the rest of the universe.
Imagine, somewhere, there
is a spherical volume uniformly filled
with a gas made up of a huge but finite number of particles in motion.
Pressure waves pass through
the gas, propagating
at
its speed
of
sound,
s, and suppose no faster signal can be sent.
The sphere has
resonances that correspond to wave trains passing through its entire
volume
at different angles and frequencies.
Each combination of a
particular direction and frequency
is called
a wave mode.
There
is
a mathematical transformation
called
the
(spatial) Fourier transform
that arranges these wave modes very neatly and powerfully.
The
Fourier transform combines the pattern of pressures found over the
original volume of the sphere {V) in various ways to produce a new
spherical set of values (f). At the center of F is a number representing
the average density of V. Immediately surrounding
it are (complex)
numbers giving the intensity of waves, in various directions, whose
wavelength just spans the diameter of V. Twice as far from the center
of F are found the intensities of wave modes with two cycles across
V; these are surrounded by another shell containing modes whose
wavelength
is one third the diameter of V, and so on.
Each point
in F describes a wave
filling V with a
direction and
a number of
cycles given by the point's orientation and distance from the center
of F. Another way of saying
this
is:
direction
in F corresponds to
direction in V; radius in F is proportional to frequency in V. Since each
wave is made of periodic clusterings of gas particles, the interparticle
spacing sets a lower bound on the wavelength, thus an upper bound
on frequency, and a limit on the radius of the F sphere. The closer the
particles, the larger F must be.
A theorem about Fourier transforms states that
if sufficiently high
frequencies are included, then F contains about as many points as
V has particles, and
all the information required to reconstruct V
is
found
in
F.
In
fact, F and V are simply alternative descriptions of
the same thing, with the interesting property that every particle in V
The Physics of Frequency Space
- The text explores the mathematical duality between a physical volume (V) and its frequency representation (F), where both contain identical information.
- In this frequency world, every point in F is a composite of every particle in V, creating a holistic relationship between the two descriptions.
- Nonlinear interactions between particles in V translate into a systematic 'physics' in F, where nearby wave modes exchange energy predictably.
- The author proposes that if the physics of F is sufficiently rich, it could support complex structures, life, and intelligence.
- The laws of F include three-dimensionality, locality based on frequency similarity, and interaction speeds that increase at higher frequencies.
- An uncertainty principle exists in F because determining the energy of a wave mode requires waiting for signals to traverse the entire volume V.
Imagine a physicist made of f stuff, for whom points in f are simply locations, not complicated functions of another space.
The Outer Limits of Computation
191
One World, Not Many?
It may be
that the indeterminate nature of quantum mechanics
is
simply a kind
of illusion and
that there
is only one world.
Here
is an outline of a model where the uncertainties at any location, or the
hidden variables, are simply "noise" from the rest of the universe.
Imagine, somewhere, there
is a spherical volume uniformly filled
with a gas made up of a huge but finite number of particles in motion.
Pressure waves pass through
the gas, propagating
at
its speed
of
sound,
s, and suppose no faster signal can be sent.
The sphere has
resonances that correspond to wave trains passing through its entire
volume
at different angles and frequencies.
Each combination of a
particular direction and frequency
is called
a wave mode.
There
is
a mathematical transformation
called
the
(spatial) Fourier transform
that arranges these wave modes very neatly and powerfully.
The
Fourier transform combines the pattern of pressures found over the
original volume of the sphere {V) in various ways to produce a new
spherical set of values (f). At the center of F is a number representing
the average density of V. Immediately surrounding
it are (complex)
numbers giving the intensity of waves, in various directions, whose
wavelength just spans the diameter of V. Twice as far from the center
of F are found the intensities of wave modes with two cycles across
V; these are surrounded by another shell containing modes whose
wavelength
is one third the diameter of V, and so on.
Each point
in F describes a wave
filling V with a
direction and
a number of
cycles given by the point's orientation and distance from the center
of F. Another way of saying
this
is:
direction
in F corresponds to
direction in V; radius in F is proportional to frequency in V. Since each
wave is made of periodic clusterings of gas particles, the interparticle
spacing sets a lower bound on the wavelength, thus an upper bound
on frequency, and a limit on the radius of the F sphere. The closer the
particles, the larger F must be.
A theorem about Fourier transforms states that
if sufficiently high
frequencies are included, then F contains about as many points as
V has particles, and
all the information required to reconstruct V
is
found
in
F.
In
fact, F and V are simply alternative descriptions of
the same thing, with the interesting property that every particle in V
192
Mind Children
contributes to the value of each point in F, and every point in F
is
reflected as a component of motion of every particle of V.
If the particles
in V bump into one another,
or interact
in some
other nonlinear way, then energy can be transferred from one wave
mode
to another
that
is, one point
in f can become stronger
at
the expense of another.
There will be a certain amount of random
transference among
all wave modes.
Besides
this,
there
will be a
more systematic interaction between "nearby" wave modes—those
very similar in frequency and orientation, thus near each other in the
F space.
In V, such waves will be in step for large fractions of their
length.
Because the gas
is nonlinear, the periodic bunching of gas
particles caused by one mode will influence the bunching ability of a
neighboring mode with a similar period.
So nearby points in F interact systematically, distant points do not.
The interaction can be considered a physics of the f world.
If the
physics is rich enough,
it may be able to support the basis of complex
structures, life and intelligence, just as does ours. Imagine a physicist
made
of f
stuff,
for whom
points
in f
are simply
locations,
not
complicated functions of another space. We can deduce some of the
"laws of physics"
this inhabitant of F will find by reasoning about
effects
in
V, and
translating back
to
F.
In
the following
list, such
reasoning is in italics:
Dimensionality: F
is three dimensional.
// V
is
three dimensional,
each wave train will be described by
its orientation, given by two angles,
say azimuth and elevation, and by its frequency. Frequency in V becomes
radius in F, while the two angles in V remain angles in F. If V were an
n dimensional sphere, F would also have n dimensions.
Locality:
Points near to each other in F can exchange energy
in
consistent, predictable ways while distant points cannot. Two wave
trains in V that are very similar in direction and frequency are in step for
a long portion of their length, and the nonlinear bunching effects will be
roughly the same cycle after cycle along the length.
Wave modes distant
from one another, on
the other hand, whose crests and troughs are not
correlated, will lose here, and gain there, and in general appear like mere
random buffetings to each other.
Interaction Speed: There
is a characteristic speed at each point in
F. Points far away from the center of F interact more quickly than
The Outer Limits of Computation
those closer in. An interaction
is the nonrandom transfer of energy from
one wave mode to another.
The smallest repeated unit in a wavetrain
is
a cycle. An effect which happens in a similar way at each cycle can have
a consistent effect on a whole wave train.
Effects
in V propagate at the
speed of sound, so a whole cycle can be affected in the time
it takes sound
to traverse
it
(this
is the time period of the wave).
The outermost parts
of F correspond to wave modes with the highest frequencies, and thus the
fastest interaction rates.
Uncertainty
Principle:
The
energy
of
a
point
in f
cannot
be
determined precisely in a short time.
The best accuracy possible
improves linearly with duration of the measurement.
The energy
at a point
in F
is
the
total energy of a particular wavetrain
tlmt span^
the entire volume V. As no signal
in V can
travel faster than the speed
of sound,
discovering
the
total
energy
in
a
wavetrain
would
involve
waiting for signals
to arrive from
all over V, a time much longer than
the basic interaction time.
In a short time, the summation
is necessarily
over a proportionately small volume.
Since
the observer
in F
is
itself
distributed over V, exactly which smaller volume is not defined—and thus
the measurement
is uncertain.
As
the time and the summation volume
increase all the possible sums converge to the average, and the uncertainty
decreases.
Superposition of States: Most interactions in F will appear to be the
sum of many possible ways the interaction might have happened.
YJhen two nearby wavetrains interact, they do so initially on a cycle-by-
cycle basis, since information from distant parts of the wavetrain arrives
only
at
the speed
of sound.
Each
cycle contains
a
little energy from
the wavetrain
in question and a
lot of energy from many other waves
of different frequency and orientation passing through the same volume.
This "background noise" will be different from one cycle to the next along
the wavetrain, so
the interaction at each cycle will be slightly different.
When
all
is
said and done—that
is,
if the information from
the entire
wavetrain
is collected—the total interaction can be interpreted as the sum
of the cycle-by-cycle interactions. Sometimes energy will be transferred one
way by one cycle and the opposite way by a distant one, so the alternatives
can cancel as well enhance one another.
These and
other properties of the F world
contain some
of the
strangest features of quantum mechanics but are the consequence only
193
Quantum Features in F Space
- Measurement uncertainty arises because the observer is distributed across a volume, making the exact location of interactions undefined.
- The superposition of states is explained as a statistical sum of cycle-by-cycle interactions influenced by background noise.
- The model mimics general relativity's gravitational time dilation, with time slowing toward the center and stopping entirely at the core.
- Nonlinearities in the medium allow energy to flow between harmonically related wave modes, creating additional degrees of freedom.
- These extra degrees of freedom can be interpreted as the tightly looped extra dimensions found in modern geometric physical theories.
At the very center, time is stopped. The central point of F never changes from its 'average density of the whole sphere' value, and so is effectively frozen in time.
The Outer Limits of Computation
those closer in. An interaction
is the nonrandom transfer of energy from
one wave mode to another.
The smallest repeated unit in a wavetrain
is
a cycle. An effect which happens in a similar way at each cycle can have
a consistent effect on a whole wave train.
Effects
in V propagate at the
speed of sound, so a whole cycle can be affected in the time
it takes sound
to traverse
it
(this
is the time period of the wave).
The outermost parts
of F correspond to wave modes with the highest frequencies, and thus the
fastest interaction rates.
Uncertainty
Principle:
The
energy
of
a
point
in f
cannot
be
determined precisely in a short time.
The best accuracy possible
improves linearly with duration of the measurement.
The energy
at a point
in F
is
the
total energy of a particular wavetrain
tlmt span^
the entire volume V. As no signal
in V can
travel faster than the speed
of sound,
discovering
the
total
energy
in
a
wavetrain
would
involve
waiting for signals
to arrive from
all over V, a time much longer than
the basic interaction time.
In a short time, the summation
is necessarily
over a proportionately small volume.
Since
the observer
in F
is
itself
distributed over V, exactly which smaller volume is not defined—and thus
the measurement
is uncertain.
As
the time and the summation volume
increase all the possible sums converge to the average, and the uncertainty
decreases.
Superposition of States: Most interactions in F will appear to be the
sum of many possible ways the interaction might have happened.
YJhen two nearby wavetrains interact, they do so initially on a cycle-by-
cycle basis, since information from distant parts of the wavetrain arrives
only
at
the speed
of sound.
Each
cycle contains
a
little energy from
the wavetrain
in question and a
lot of energy from many other waves
of different frequency and orientation passing through the same volume.
This "background noise" will be different from one cycle to the next along
the wavetrain, so
the interaction at each cycle will be slightly different.
When
all
is
said and done—that
is,
if the information from
the entire
wavetrain
is collected—the total interaction can be interpreted as the sum
of the cycle-by-cycle interactions. Sometimes energy will be transferred one
way by one cycle and the opposite way by a distant one, so the alternatives
can cancel as well enhance one another.
These and
other properties of the F world
contain some
of the
strangest features of quantum mechanics but are the consequence only
193
194
Mind Children
of an unusual way of looking at a prosaic situation. There are a few
differences.
The superposition of states
is
statistical,
rather than a
perfect sum over all possibilities, as in traditional quantum mechanics.
This makes only a very subtle difference
if V is very large but might
result in a very tiny amount of "noise"
in measurements that could
help distinguish the F mechanism from other explanations of quantum
mechanics.
The model
as
presented
does
not
exhibit
the
effects
of
special
relativity in any obvious way, and this is a serious defect,
if we hope
to wrestle
it
into
a description of our world.
There
is something
wrong in the way it treats time.
It does have one property that mimics
the temporal effects of a general relativistic gravitational field. Time
near the center of F runs more slowly than
at
the extremes,
since
the interactions are based on lower frequency waves.
At the very
center, time
is stopped.
The central point of F never changes from
its "average density of the whole sphere" value, and so is effectively
frozen in time.
In general relativity the regions around a gravitating
body have a similar property:
time flows slower as one gets closer.
Near very dense masses (that is, black holes), time stops altogether at
a certain distance.
A few
of modern
physics' more
exotic
theories have
a
possible
explanation
in
this model.
Although energy mainly flows between
wave modes very similar in frequency and direction (such as points
adjacent
in
F), nonlinearities
in the V medium should permit some
energy
to
flow
systematically between
harmonically
related wave
modes,
for instance between one mode and another on
the same
direction, but twice as high in frequency. Such modes of energy flow
in F provide "degrees of freedom" in addition to the three provided
by nearby points. They can be interpreted, when viewed on the small
scale, as extra dimensions (energy can move this way, that way, that
way and also
that way, and
that
way...).
Since
a circumnavigation
from harmonic
to harmonic will cover the available space
in fewer
steps than a move along adjacent wave modes, these extra dimensions
will appear to have a much smaller extent than the basic three. The
greater the energy involved, the more harmonics may be activated and
the higher the dimensionahty. Most physical theories these days have
tightly looped extra dimensions to provide a geometric explanation
for the basic
forces.
Ten and eleven dimensions are popular, and
new
forces
suggested by some
theories may
introduce
more.
If
Fourier Universes and Higher Dimensions
- Higher-dimensional theories suggest that harmonic links between distant regions could enable instantaneous travel and communication across the universe.
- The universe's microwave background radiation can be viewed as a Fourier transform space (F) that interacts nonlinearly with matter.
- As the universe expands and cools, time in the F-space slows down, potentially allowing inhabitants to survive indefinitely by decelerating their subjective experience.
- The early universe's high energy suggests that eons of subjective time could have passed in the F-space during the first microsecond of the Big Bang.
- Communication between the physical world (V) and the Fourier world (F) is nearly impossible, appearing only as universe-spanning 'miracles' or entropy violations.
- The existence of infinite orthogonal transforms implies an infinity of overlapping universes, each with unique physics, sharing the same underlying space.
The first microsecond of the big bang could represent eons of subjective time in F.
194
Mind Children
of an unusual way of looking at a prosaic situation. There are a few
differences.
The superposition of states
is
statistical,
rather than a
perfect sum over all possibilities, as in traditional quantum mechanics.
This makes only a very subtle difference
if V is very large but might
result in a very tiny amount of "noise"
in measurements that could
help distinguish the F mechanism from other explanations of quantum
mechanics.
The model
as
presented
does
not
exhibit
the
effects
of
special
relativity in any obvious way, and this is a serious defect,
if we hope
to wrestle
it
into
a description of our world.
There
is something
wrong in the way it treats time.
It does have one property that mimics
the temporal effects of a general relativistic gravitational field. Time
near the center of F runs more slowly than
at
the extremes,
since
the interactions are based on lower frequency waves.
At the very
center, time
is stopped.
The central point of F never changes from
its "average density of the whole sphere" value, and so is effectively
frozen in time.
In general relativity the regions around a gravitating
body have a similar property:
time flows slower as one gets closer.
Near very dense masses (that is, black holes), time stops altogether at
a certain distance.
A few
of modern
physics' more
exotic
theories have
a
possible
explanation
in
this model.
Although energy mainly flows between
wave modes very similar in frequency and direction (such as points
adjacent
in
F), nonlinearities
in the V medium should permit some
energy
to
flow
systematically between
harmonically
related wave
modes,
for instance between one mode and another on
the same
direction, but twice as high in frequency. Such modes of energy flow
in F provide "degrees of freedom" in addition to the three provided
by nearby points. They can be interpreted, when viewed on the small
scale, as extra dimensions (energy can move this way, that way, that
way and also
that way, and
that
way...).
Since
a circumnavigation
from harmonic
to harmonic will cover the available space
in fewer
steps than a move along adjacent wave modes, these extra dimensions
will appear to have a much smaller extent than the basic three. The
greater the energy involved, the more harmonics may be activated and
the higher the dimensionahty. Most physical theories these days have
tightly looped extra dimensions to provide a geometric explanation
for the basic
forces.
Ten and eleven dimensions are popular, and
new
forces
suggested by some
theories may
introduce
more.
If
The Outer Limits of Computation
195
something like the F explanation of apparent higher dimensionality
is correct, there
is a bonus.
Viewed on a large scale, the harmonic
"dimensions" are actual links between distant regions of space and,
properly
exploited,
could allow instantaneous communication and
travel over enormous distances.
Big Waves
Now, forget the possible implications of the F idea as a mechanism
for quantum mechanics and consider our universe on the grand scale.
It
is permeated by
a background
of microwave
radiation with
a
wavelength centered around
1 millimeter, a length slowly increasing
as
the universe expands and
cools.
It
affects, and
is
affected
by,
clouds of matter
in
interstellar space and thus
interacts with
itself
nonlinearly.
If we do a universe-wide spatial Fourier transform of
this radiation
(that
is,
treat our world as
V), we end up with an F
space with properties much like those of the previous section.
The
expansion of the universe adds a new twist. As our universe gradually
expands, the wavelengths of the background radiation increase.
As
the wavelengths get longer and longer, the relative rate of time flow
in the F world slows down. Any inhabitants of F would be ideally
situated to practice the "live forever by going slower and slower as
it
gets colder and colder" strategy proposed by Freeman Dyson. By now
they would be moving quite slowly—their fastest particle interactions
would take several trillionths of a second. In the past, shortly after the
big bang, when the universe was dense and hot, the F world would
have been a lively place, running millions or billions of times faster.
In the earliest moments of the universe, the speed would have been
astronomically faster.
The
first microsecond
of
the
big bang could
represent eons
of
subjective time in
F. Perhaps enough time for intelligence to evolve,
realize
its
situation, and seed
smaller but eventually
faster
life
in
the V
space.
Though on
the
large
scale F and V
are
the same
thing, manipulation of one from the other, or even communication
between the two, would be extraordinarily difficult. Any local event
in either space would be diffused to nondetectability in the other. Only
massive,
universe-spanning
projects with
long-range order would
work, and
these would
take huge amounts of time because of the
speed limits in either universe.
Real-time interaction between V and
196
Mind Children
F
is ruled out.
Such projects, however, couW affect many locations
in the other space as easily (in many cases more easily) as one, and
these could appear as entropy-violating "miracles" there.
If I lived in
F and wanted to visit V,
I would engineer such a miracle that would
condense a robot surrogate of myself in V, then later another miracle
that would read out the robot's memories back into an f-accessible
form.
The Fourier transform that converts V into F is identical except for
a minus sign
to the inverse transform that converts the other way.
Given
just the two
descriptions,
it would not be
clear which was
the
"original"
world.
In
fact,
the Fourier transform
is but one of
an infinite class of "orthogonal transforms" that have the same basic
properties. Each of these is capable of taking a description of a volume
and operating over it to produce a different description with the same
information, but with each original point spread to every location in
the result. This leads to the possibility of an infinity of universes, each
a different combination of the same underlying stuff, each exhibiting
quantum mechanical behavior but otherwise having
its own unique
physics, each oblivious of the others sharing its space.
I don't know
where to take that idea.
Bibliography of Mind and Machine
- The text provides a comprehensive bibliography spanning the origins of life, cybernetics, and artificial intelligence.
- Key scientific works listed explore the transition from mineral origins to biological organisms and the evolution of human intelligence.
- A significant portion of the references focuses on the intersection of robotics, synthetic psychology, and animal cognition.
- The bibliography includes foundational texts on computing history, from Babbage's engines to the development of digital calculators.
- Neurobiological perspectives are represented through studies on the retina, cellular behavior, and the physical structure of the brain.
The Thinking Computer: Mind inside Matter.
Bibliography
Prologue
Cairns-Smith,
A. G.
1982.
Genetic
Takeover and
the Mineral
Origins
of
Life.
Cambridge: Cambridge University Press.
1985.
Seven
Clues
to
the Origin
of
Life: A
Scientific
Detective
Story.
Cambridge: Cambridge University Press.
1985 (June). "The First Organisms."
Scientific American 253:90-98.
Calder, Nigel.
1983.
Timescale: An Atlas of the Fourth Dimension. New York:
Viking Press.
Desmond, Kevin.
1986. A Timetable of Inventions and Discoveries. New York:
M. Evans.
Sagan, Carl. 1977. The Dragons of Eden: Speculations on the Evolution of Human
Intelligence. New York: Random House.
Chapter 1: Mind in Motion
Ashby, W. Ross.
1963. An Introduction
to Cybernetics. New York: John Wiley
& Sons.
Asimov, Isaac.
1950.
I, Robot. New York: Doubleday
Bakker, Robert T. 1986. The Dinosaur Heresies. New York: William Morrow.
Braitenberg, Valentino.
1984.
Vehicles:
Experiments
in
Synthetic Psychology.
Cambridge: MIT Press.
Brooks,
J., and G. Shaw.
1973. Origin and Development of Living Systems. New
York: Academic Press.
Buchsbaum,
Ralph.
1948.
Animals
without
Backbones.
2nd
ed.
Chicago:
University of Chicago Press.
Feigenbaum, Edward
A., and Juhan Feldman,
eds.
1963.
Computers and
Thought. New York: McGraw-Hill.
Fichtelius, Karl-Erik, and Sverre Sjolander.
1972.
Smarter than Man?
Intelli-
gence in Whales, Dolphins and Humans. New York: Ballantine Books.
Griffin, Donald R. 1984.
Animal Thinking.
Cambridge:
Harvard University
Press.
197
198
Bibliography
Lane, Frank W. 1962. Kingdom of the Octopus: The Life History of the Cephalopoda.
New York: Pyramid Publications.
Marsh, Peter.
1985.
Robots. New York: Crescent Books.
Mayr,
Ernst.
1982.
The Growth of Biological Thought.
Cambridge:
Harvard
University Press.
McCorduck,
Pamela.
1979.
Machines Who
Think.
San
Francisco:
W. H.
Freeman.
Minsky, Marvin, ed.
1985.
Robotics. New York: Doubleday
1986. The Society of Mind. New York: Simon & Schuster.
Moynihan, Martin.
1985. Communication and Noncommunication by Cephalopods.
Bloomington: Indiana University Press.
Nilsson, Nils, ed.
1984. Shakey the Robot:
Artificial Intelligence Center Technical
Note 323. Menlo Park: SRI International.
Pawson, Richard.
1985. The Robot Book. London: W H Smith & Son.
Pratt, Vernon.
1987.
Thinking Machines: The Evolution of Artificial Intelligence.
Oxford:
Basil Blackwell.
Raphael, Bertram.
1976.
The Thinking Computer:
Mind
inside Matter.
San
Francisco: W. H. Freeman.
Reichardt, Jasia.
1978.
Robots: Fact, Fiction and Prediction. Middlesex: Penguin
Books.
Thorson, Gunnar.
1971.
Life in the Sea. New York: McGraw-Hill.
Walter, W. Grey.
1961. The Living Brain. Middlesex: Penguin Books.
Wiener, Norbert.
1965. Cybernetics, or Control and Communication in the Animal
and the Machine. Cambridge: MIT Press.
Chapter 2: Powering Up
Babbage, Charles.
1961.
Charles Babbage and His Calculating Engines.
Edited
by Philip Morrison and Emily Morrison. New York: Dover Publications.
Berkeley, Edmund C.
1949.
Giant Brains or Machines That Think. New York:
John Wiley & Sons.
Booth, Andrew, and Kathleen
Booth.
1956.
Automatic
Digital
Calculators.
London: Butterworths.
Cale, E. G., L. L. Gremillion, and
J. L. McKenney.
1979.
"Price/performance
patterns of U.S. computer systems."
Communications of the ACM 22(4):
225-230.
Dertouzos, Michael
L., and
Joel Moses,
eds.
1979.
The Computer Age: A
Twenty-Year Review. Cambridge: MIT Press.
Dowling, John
E.
1987.
The Retina: An Approachable Part of the Brain. Cam-
bridge: Harvard University Press.
Bibliography
199
Drexler, K. Eric.
1986. Engines of Creation. New York: Doubleday.
Fames, Charles, and Ray Eames.
1973. A Computer Perspective.
Cambridge:
Harvard University Press.
Hubel, David, ed.
1979 (September).
The Brain—Scientific American, special
issue, 241(3).
Kandel, Eric R.
1976.
Cellular Basis of Behavior: An Introduction
to Behavioral
Neurobiology. New York: W. H. Freeman.
Kandel,
Eric
R., and
J. H. Schwartz.
1982.
"Molecular basis of memory."
Science 218:433-436.
Kuffler, Stephen
W., and John G.
Nichols.
1976.
From Neuron
to
Brain:
A
Cellular Approach
to
the Function
of the Nervous System.
Sunderland,
Massachusetts: Sinauer Associates.
Lazou, Christopher.
1986.
Supercomputers and Their Use.
Oxford: Clarendon
Press.
Minsky, Marvin, and Seymour Papert.
1969.
Perceptrons: An Introduction
to
Computational Geometry. Cambridge: MIT Press.
Moreau, Rene.
1984. The Computer Comes of Age. Cambridge: MIT Press,
von Neumann, John.
1958.
The Computer and
the Brain. New Haven:
Yale
University Press.
C^eisser, Hans.
1988.
The Conquest of the Microchip.
Cambridge:
Harvard
University Press.
Randell,
Brian,
ed.
1973.
The Origins of Digital Computers:
Selected Papers.
Berlin: Springer-Verlag.
Rosen, Saul.
1971. ACM 71: A Quarter-Century View. New York: Association
for Computing Machinery.
Squire, Larry R- 1986. "Mechanisms of memory."
Science 232:1612-1619.
Turn, Rein.
1974.
Computers
in
the 1980s. New York: Columbia University
Press.
Weik, Martin H. 1957. A Second Sun^ey of Domestic Electronic Digital Computing
Systems.
Aberdeen, Maryland:
Army
Ballistic Research
Laboratories,
report no.
1010.
Wolfe, Jeremy M. 1986. The Mind's Eye: Readings from Scientific American. New
York: W. H. Freeman.
Wolken, Jerome
J.
1975.
Photoprocesses,
Photoreceptors, and
Evolution.
New
York: Academic Press.
Chapter 3: Symbiosis
Boorstin, Daniel
J. 1983. The Discoverers. New York: Random House.
Time-Life Books, eds.
1985. Computer Images: Understanding Computers Series.
Arlington: Time-Life Books.
Scientific and Computational Bibliography
- The text provides a comprehensive list of academic and popular sources spanning neuroscience, computer science, and evolutionary biology.
- Key themes include the molecular basis of memory and the functional relationship between the biological brain and digital computers.
- The bibliography highlights early research into computer viruses, 'worm' programs, and the evolution of cooperation in digital environments.
- It references foundational texts in artificial intelligence and computational geometry, such as Minsky and Papert's work on perceptrons.
- The collection bridges the gap between hard science and speculative fiction, citing authors like Vernor Vinge and Carl Sagan alongside NASA research studies.
The 'worm' programs: early experience with a distributed computation.
Bibliography
199
Drexler, K. Eric.
1986. Engines of Creation. New York: Doubleday.
Fames, Charles, and Ray Eames.
1973. A Computer Perspective.
Cambridge:
Harvard University Press.
Hubel, David, ed.
1979 (September).
The Brain—Scientific American, special
issue, 241(3).
Kandel, Eric R.
1976.
Cellular Basis of Behavior: An Introduction
to Behavioral
Neurobiology. New York: W. H. Freeman.
Kandel,
Eric
R., and
J. H. Schwartz.
1982.
"Molecular basis of memory."
Science 218:433-436.
Kuffler, Stephen
W., and John G.
Nichols.
1976.
From Neuron
to
Brain:
A
Cellular Approach
to
the Function
of the Nervous System.
Sunderland,
Massachusetts: Sinauer Associates.
Lazou, Christopher.
1986.
Supercomputers and Their Use.
Oxford: Clarendon
Press.
Minsky, Marvin, and Seymour Papert.
1969.
Perceptrons: An Introduction
to
Computational Geometry. Cambridge: MIT Press.
Moreau, Rene.
1984. The Computer Comes of Age. Cambridge: MIT Press,
von Neumann, John.
1958.
The Computer and
the Brain. New Haven:
Yale
University Press.
C^eisser, Hans.
1988.
The Conquest of the Microchip.
Cambridge:
Harvard
University Press.
Randell,
Brian,
ed.
1973.
The Origins of Digital Computers:
Selected Papers.
Berlin: Springer-Verlag.
Rosen, Saul.
1971. ACM 71: A Quarter-Century View. New York: Association
for Computing Machinery.
Squire, Larry R- 1986. "Mechanisms of memory."
Science 232:1612-1619.
Turn, Rein.
1974.
Computers
in
the 1980s. New York: Columbia University
Press.
Weik, Martin H. 1957. A Second Sun^ey of Domestic Electronic Digital Computing
Systems.
Aberdeen, Maryland:
Army
Ballistic Research
Laboratories,
report no.
1010.
Wolfe, Jeremy M. 1986. The Mind's Eye: Readings from Scientific American. New
York: W. H. Freeman.
Wolken, Jerome
J.
1975.
Photoprocesses,
Photoreceptors, and
Evolution.
New
York: Academic Press.
Chapter 3: Symbiosis
Boorstin, Daniel
J. 1983. The Discoverers. New York: Random House.
Time-Life Books, eds.
1985. Computer Images: Understanding Computers Series.
Arlington: Time-Life Books.
200
Bibliography
Chapter 4: Grandfather Clause
Forward, Robert L. 1980. Dragon's Egg. New York: Ballantine Books.
1984. The Flight of the Dragonfly. New York: Simon & Schuster
Hofstadter, Douglas R., and Daniel C. Dennett, eds.
1981. The Mind's
I. New
York: Basic Books.
Rucker, Rudy. 1983.
Software. Middlesex: Penguin Books.
Sperry, Roger
1982. "Some effects of disconnecting the cerebral hemispheres."
Science 217:1223-1226.
Vinge, Vernor
1984. True Names. New York: Bluejay Books.
Chapter 5: Wildlife
Axelrod, Robert.
1984. The Ez'olution of Cooperation. New York: Basic Books.
Cohen, Fred.
1984.
Computer Viruses.
Los Angeles:
University of Southern
California.
Dewdney A. K. 1984 (May), 1985 (March), and 1987 (January). "Core wars."
Scientific American 250:14-17, 252:14-23, 256:14-18.
Dawkins, Richard.
1976. The Selfish Gene. Oxford: Oxford University Press.
1982. The Extended Phenotype. Oxford: Oxford University Press.
1986. The Blind Watchmaker. New York: W. W. Norton.
Hoyle, Fred, and John Elliot.
1962. A for Andromeda. New York: Harper
Oliver,
B. M., and
J. Billingham.
1971.
Project Cyclops: A Design Study of a
System for Detecting Extraterrestial Intelligent Life. Moffett Field, California:
NASA/Ames Research Center
Rosen, Eric C. 1981.
Vulnerabilities of Netivork Control Protocols: An Example.
Cambridge:
Bolt Beranek and Newman, Inc.
Sagan, Carl.
1985.
Contact. New York: Simon & Schuster
Shoch, John
F, and Jon
A. Hupp.
1982.
"The 'worm'
programs:
early
experience with a distributed computation." Communications of the ACM
25(3):1 72-180.
Thompson, Ken.
1984.
"Reflections on trusting trust." Communications of the
ACM 27(8):761-763.
Chapter 6: Breakout
Barrow, John D., and Frank J. Tipler 1986. The Anthropic Cosmological Principle.
Oxford: Oxford University Press.
Dyson, Freeman.
1979. Disturbing the Universe. New York: Harper & Row.
1988.
Infinite in all Directions. New York: Harper &c Row.
Gardner, Martin.
1983.
Wheels, Life and Other Mathematical Amusements. New
York: W. H. Freeman.
Bibliography
201
Hawking, Stephen W. 1988. A Brief History of Time: From the Big Bang to Black
Holes. New York; Bantam Books.
Weinberg, Steven.
1977. The First Three Minutes. New York:
Basic Books.
Appendix 3: The Outer Limits of Computation
DeWitt, Bryce S., and Neill Graham, eds.
1973. The Many-Worlds Interpretation
of Quantum Meclianics. Princeton: Princeton University' Press.
Feynman, Richard
P., Robert
B. Leighton, and Matthew Sands.
1965.
The
Feynman Lectures on Physics.
Vol.
3. New York: Addison-VVesley.
Gribbin, John. 1984. In Search of Schrodinger's Cat: Quantum Physics and Reality.
New York: Bantam Books.
1985. "Doomsday device."
Analog Science Fiction-Science Fact 105:22-
127.
Origins of a Mechanical Vision
- The author traces the book's conceptual roots to childhood influences and early debates at the Stanford Artificial Intelligence Laboratory (SAIL).
- A pivotal 1971 proposal by Dick Fredericksen regarding digital immortality through neural replacement polarized the SAIL community.
- The author's ideas on intelligent machinery crystallized through decades of discussions with prominent researchers at Stanford and Carnegie Mellon.
- The manuscript's development was catalyzed in 1985 by a timely invitation from Harvard University Press editor Howard Boyer.
- The text acknowledges the critical role of science fiction, academic mentors, and government funding from the Office of Naval Research in shaping the work.
Over several articles he had developed the concept of achieving immortality, and much else, by replacing a human nervous system, bit by bit, with a more durable artificial equivalent.
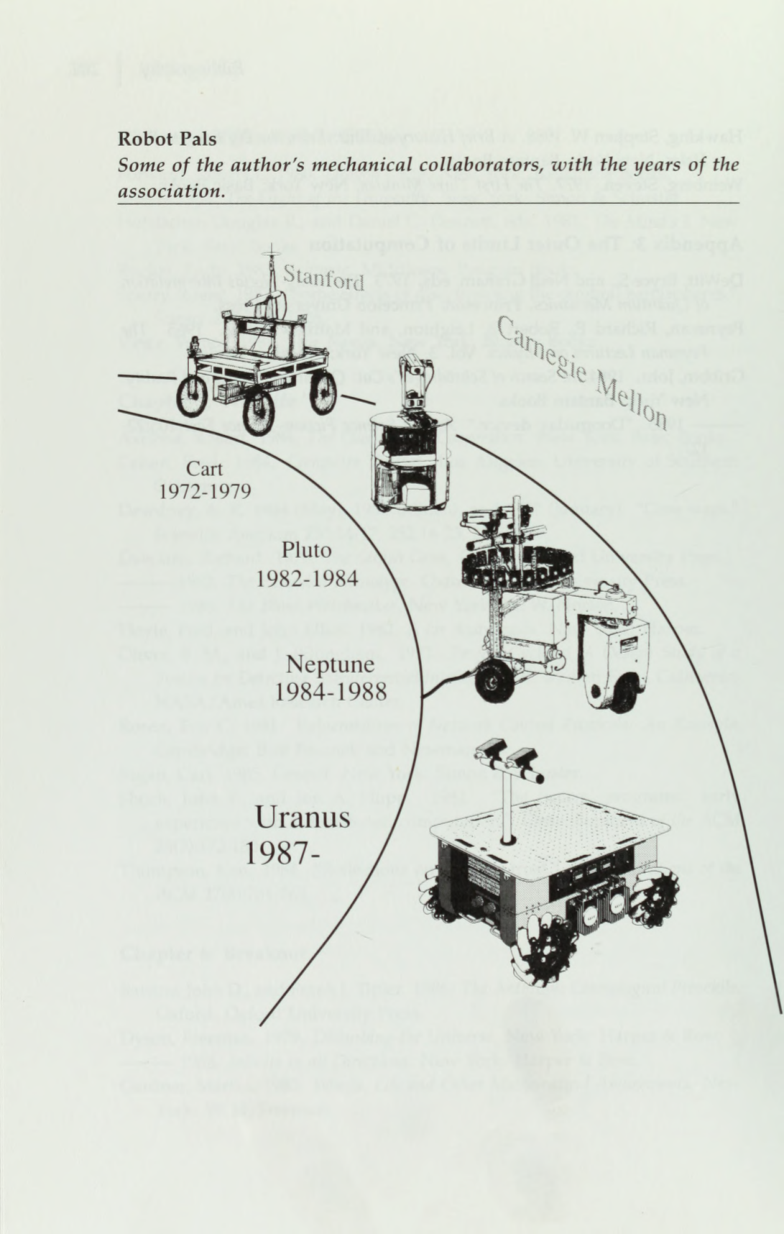
Bibliography
201
Hawking, Stephen W. 1988. A Brief History of Time: From the Big Bang to Black
Holes. New York; Bantam Books.
Weinberg, Steven.
1977. The First Three Minutes. New York:
Basic Books.
Appendix 3: The Outer Limits of Computation
DeWitt, Bryce S., and Neill Graham, eds.
1973. The Many-Worlds Interpretation
of Quantum Meclianics. Princeton: Princeton University' Press.
Feynman, Richard
P., Robert
B. Leighton, and Matthew Sands.
1965.
The
Feynman Lectures on Physics.
Vol.
3. New York: Addison-VVesley.
Gribbin, John. 1984. In Search of Schrodinger's Cat: Quantum Physics and Reality.
New York: Bantam Books.
1985. "Doomsday device."
Analog Science Fiction-Science Fact 105:22-
127.
Robot Pals
Some of the author's mechanical collaborators, with the years of the
association.
Acknowledgments &
Illustration Credits
THIS book has roots deep in my childhood. My mem-
ory isn't up to the task of acknowledging them individually, but my thanks
go to the authors of science and science fiction, teachers, librarians, science
fair organizers and
friends who helped shape my mental world through
four decades. My memory
is good enough to recall that my younger sisters
Elizabeth and Alice were the long-suffering sounding boards for many years
of my long-winded speculations.
In late 1971, when
I arrived as a graduate student at the Stanford Artificial
Intelligence Laboratory', a lively debate was just winding down that had been
sparked bv a proposal from Dick Fredericksen in his self-published newsletter,
A Word
in Edgeunse.
Over several articles he had developed the concept of
achieving immortality, and much else, by replacing a human nervous system,
bit by bit, with a more durable artificial equivalent. The exchange interested
me greatly because the idea had occurred to me years before, in high school,
but had suffered from lack of a receptive audience. At SAIL, Fredericksen's
proposal had polarized those who took
it
seriously.
Bruce Baumgart was
its
chief proponent, while Larry Tessler found
it dehumanizing.
My own
thoughts about the future of intelligent machinerv' crystallized in discussions
with Rod Brooks, Bruce Bullock, Mike Farmwald, Bob Forward, Don Gennery,
Erik
Gilbert,
Bill Gosper, David Grossman,
Brian Harvey, Marc Le Brun,
Robert Maas, John McCarthy, Ed Mcguire, Dave Poole, Jeff Rubin, Clem Smith,
Russ Taylor, Lowell Wood, and quite a few others.
In 1975
I wrote an essay
on the subject that evolved over the years into several articles and, eventually,
into this book.
The discussions continued when
I came
to Carnegie Mellon University
in 1980.
Here
it
is my pleasure to acknowledge mind-stretching exchanges
with Mike Blackwell, Kevin Dowling, Alberto Elfes, Larry Matthies, Pat Muir,
Gregg Podnar, Olin Shivers, and Richard Wallace.
I would also like to thank
the administration of the Robotics Institute, especially Raj Reddy and Takeo
Kanade, for maintaining an environment that allows me to pursue long-range
goals.
I am equally grateful to the Office of Naval Research, and my program
203
204
Acknowledgments & Illustration Credits
director, Alan Meyrowitz, for providing the steady funding that has supported
my basic research since 1981.
Though
I vaguely intended to develop my ideas to book length in 1975,
it was only in 1985 that
1 seriously began to work on a manuscript.
By an
amazing coincidence, within two weeks of undertaking the project I received a
letter from Howard Boyer, the newly arrived Editor for Science and Medicine
at Harvard University Press, inviting me
to write just such a book.
In the
three years since then, Howard has whipped the book through a grueling
series of writing and publishing hurdles.
1 am deeply grateful for his interest
and insight.
The
first hurdle—to produce a detailed outline that would pass editorial
muster at Harvard Press—was surmounted with the aid of extensive reviews
written by Vernor Vinge. The many drafts of the manuscript which followed
were greatly improved by the Press's referees, whose comments were var-
iously encouraging,
informative, and
stern.
1 thank Rod Brooks,
Richard
Dawkins, Kee Dewdney, Bruce Donald, John Dowling, Bob Forward, John
McCarthy, Pamela McCorduck, and others whose identity
1 have not learned.
The most dramatic improvements in the book occurred when
it was put in
the hands of my manuscript editor, Susan Wallace. Susan reorganized the text
from a ragged collection of ideas into a cohesive whole, setting the stage for
and coaching to completion—a rewrite that made a night-and-day difference
in the book's quality.
With exceptions noted below, the line art in the book was drawn by me
on a Macintosh
II from Apple Computer.
The programs used were Cricket
Draw from Cricket Software and SuperPaint from Silicon Beach Software, with
occasional dips into digitized clip-art collections—the McPic! packages from
Magnum Software and ClickArt packages from T/Maker Graphics. Some art
was scanned from hand drawings and photographs with
the Thunderscan
program and hardware from Thunderware.
Earlier versions
of many
of
the drawings had been produced on
smaller Macintoshes with MacPaint,
MacDraw, FuUPaint, and MacDraft.
Mike Blackwell redrew "Intelligence on Earth" (page 18) in Cricket Draw
from my MacDraw original. "The Retina" (page 54) was drawn on a Macintosh
SE by Mary Jo Dowling, using Adobe
Illustrator from Adobe Systems.
She
worked from an illustration which appeared in The Retina by John Dowling (no
relation). The gear and integrated circuit icons in "A Century of Computing"
(page 64) were drawn by Gregg Podnar using MacPaint.
"A Robot Bush"
(page 103) was produced by a program which
1 wrote with help from Mike
Blackwell, in Apple Computer's MPW C language, running on a Macintosh
II.
It contains one quarter of a million line segments and took ten hours to
compute. The "Selfish Martians" cartoon (page 142) was drawn by Kimberlee
Faught with Cricket Draw.
The pictures of the Cart, Pluto, and Neptune in
Acknowledgments and Technical Production
- The author credits manuscript editor Susan Wallace for transforming a 'ragged collection of ideas' into a cohesive, high-quality book.
- The majority of the book's line art was personally created by the author using early Macintosh hardware and various software packages like Cricket Draw and SuperPaint.
- Complex illustrations, such as 'A Robot Bush,' required custom programming in C and ten hours of computation to render a quarter-million line segments.
- The production utilized cutting-edge desktop publishing tools of the era, including Don Knuth's TeX system and Linotronic digital typesetters.
- A diverse range of organizations, including Pixar, the Smithsonian, and MIT, provided specialized photographic and illustrative permissions.
- The inclusion of an index highlights key themes of the work, ranging from biological intelligence to the history of analytical engines.
It contains one quarter of a million line segments and took ten hours to compute.
204
Acknowledgments & Illustration Credits
director, Alan Meyrowitz, for providing the steady funding that has supported
my basic research since 1981.
Though
I vaguely intended to develop my ideas to book length in 1975,
it was only in 1985 that
1 seriously began to work on a manuscript.
By an
amazing coincidence, within two weeks of undertaking the project I received a
letter from Howard Boyer, the newly arrived Editor for Science and Medicine
at Harvard University Press, inviting me
to write just such a book.
In the
three years since then, Howard has whipped the book through a grueling
series of writing and publishing hurdles.
1 am deeply grateful for his interest
and insight.
The
first hurdle—to produce a detailed outline that would pass editorial
muster at Harvard Press—was surmounted with the aid of extensive reviews
written by Vernor Vinge. The many drafts of the manuscript which followed
were greatly improved by the Press's referees, whose comments were var-
iously encouraging,
informative, and
stern.
1 thank Rod Brooks,
Richard
Dawkins, Kee Dewdney, Bruce Donald, John Dowling, Bob Forward, John
McCarthy, Pamela McCorduck, and others whose identity
1 have not learned.
The most dramatic improvements in the book occurred when
it was put in
the hands of my manuscript editor, Susan Wallace. Susan reorganized the text
from a ragged collection of ideas into a cohesive whole, setting the stage for
and coaching to completion—a rewrite that made a night-and-day difference
in the book's quality.
With exceptions noted below, the line art in the book was drawn by me
on a Macintosh
II from Apple Computer.
The programs used were Cricket
Draw from Cricket Software and SuperPaint from Silicon Beach Software, with
occasional dips into digitized clip-art collections—the McPic! packages from
Magnum Software and ClickArt packages from T/Maker Graphics. Some art
was scanned from hand drawings and photographs with
the Thunderscan
program and hardware from Thunderware.
Earlier versions
of many
of
the drawings had been produced on
smaller Macintoshes with MacPaint,
MacDraw, FuUPaint, and MacDraft.
Mike Blackwell redrew "Intelligence on Earth" (page 18) in Cricket Draw
from my MacDraw original. "The Retina" (page 54) was drawn on a Macintosh
SE by Mary Jo Dowling, using Adobe
Illustrator from Adobe Systems.
She
worked from an illustration which appeared in The Retina by John Dowling (no
relation). The gear and integrated circuit icons in "A Century of Computing"
(page 64) were drawn by Gregg Podnar using MacPaint.
"A Robot Bush"
(page 103) was produced by a program which
1 wrote with help from Mike
Blackwell, in Apple Computer's MPW C language, running on a Macintosh
II.
It contains one quarter of a million line segments and took ten hours to
compute. The "Selfish Martians" cartoon (page 142) was drawn by Kimberlee
Faught with Cricket Draw.
The pictures of the Cart, Pluto, and Neptune in
Acknowledgments & Illustration Credits
"Robot Pals" (page 202) are digitized and touched-up renderings of pencil
drawings by Bill Nee. The picture of Uranus is a digitized photograph touched
up by me and Gregg Podnar.
The following organizations provided photographs and granted permission
to reproduce them: "Walking Machines" (page 27), courtesy of Odetics, Inc.;
'Three Fingers"
(page
30),
courtesy
of David Lampe, MIT; "Autonomous
Navigation" (page
33), courtesy of Denning Mobile Robotics,
Inc.;
"Object
Finding" (page
35), courtesy of SRI International; "The Retina" (page
54),
courtesv of John Dowling;
"ENIAC" (page
76), © Smithsonian
Institution;
"Magic Glasses" (page 87), courtesy of United Technologies /Hamilton Stan-
dard;
"Robot Proxy" (page
88), courtesy of Naval Ocean Systems Center;
"Unreal Estat^The Road to Point Reyes" (page 92), © 1986 Pixar.
The book was designed by Joyce C. Weston, Marianne Perlak, and Mike
Blackwell.
It was typeset by Mike Blackwell in the TgX document preparation
system created at Stanford University by Don Knuth, as instantiated in the
Textures program by Addison-Wesley, running on a Macintosh II. The typeface
is Palatino, obtained from Adobe Systems. Camera-ready copy was generated
on
a
Linotronic 300
digital
typesetter owned by the Robotics
Institute
of
Carnegie Mellon University, driven by a Macintosh SE. Early drafts of the
book were printed on Apple laserwriters.
205
Index
A for Andromeda,
137
Abstract thought,
16
Abstraction,
39, 131-135, 141, 145, 178
Addition,
120, 164-165, 172
Address,
78, 155, 172
Adept,
12
AI,
see Artificial intelligence
Algol,
40
Algorithms,
31, 149
Alternative actions,
39, 43, 47-49, 123,
179
Alto,
85
Altruism,
141
Amacrine cell,
54, 57
Amphibians,
18-19
Analog computer,
6-8
Analytical Engine,
65-66, 69
Animal Thinking,
43
Aplysia,
44, 60, 166
Apollo,
51, 101
Apple Computer,
11-12, 37, 85
Apple
11,
128
AppUcations software,
24, 37, 45-46
Arithmometer,
66
ARPAnet,
133
Arthropods,
18-19
Artificial intelligence (Al),
7-10, 13-16,
21, 50-51, 61, 75, 151, 163
Asimov, Isaac,
10
Aspect, Alain,
186
Assemblers,
78-81
Attention span,
114
Automatically Guided Vehicle (AGV),
22
Axelrod, Robert,
141-145
Axons,
53-58
Babbage, Charles,
65-66, 69
Bacteria,
18-19, 43, 61, 69, 144, 167, 183
Barrow, John,
148
Basic,
40
Batch mode,
80
Bees,
43, 61, 138, 151, 168
Bell Laboratories,
66, 71, 82, 132
Bin-picking problem,
36
Binary search,
189
Biotechnology,
72, 108
Bipolar cell,
54-57
Birds,
18-19, 97
Bit,
60, 77, 131, 171-172
Bivalves,
18-19
Black holes,
101, 194
Blinkers,
151
Blocks world,
14
Blue-green algae,
18-19
Body-identity position,
116-118
Body/mind problem,
4, 116
Boeing,
87
Boredom,
47, 63, 91, 114, 153, 179
Bottom-up evolution,
17, 20, 50
Brain,
18-19, 52-54, 59-61, 108-115, 118-
120, 163-165, 190
Brainstem,
110-111
Bulk storage,
77
Bulletin boards, computer,
81, 127-128,
131
C compiler,
132-133
Cairns-Smith, A. G.,
3
Calculation,
66-67, 77, 113, 158, 164,
180
Calculators,
2,
11, 61-62, 65-66, 167, 180
Calculus,
8-10
Camera,
21, 31-32, 48, 88-90, 153, 164
Camera eye,
13, 88
Capacitor,
7
207
Index of Technological Evolution
- The index catalogs the intersection of biological concepts like DNA, bacteria, and evolution with computational advancements such as AI, cellular automata, and computer viruses.
- It highlights key historical figures in computing and science, including Charles Babbage, Alan Turing (via Colossus/Enigma), and Albert Einstein.
- Significant focus is placed on the physical and theoretical components of intelligence, ranging from axons and bipolar cells to expert systems and consciousness.
- The text tracks the progression of robotics and automation through entries like the Stanford Cart, AGVs, and the development of computer vision.
- Broader philosophical and scientific inquiries are represented through topics like the body/mind problem, the Fermi paradox, and black holes.
Boredom, 47, 63, 91, 114, 153, 179
Index
A for Andromeda,
137
Abstract thought,
16
Abstraction,
39, 131-135, 141, 145, 178
Addition,
120, 164-165, 172
Address,
78, 155, 172
Adept,
12
AI,
see Artificial intelligence
Algol,
40
Algorithms,
31, 149
Alternative actions,
39, 43, 47-49, 123,
179
Alto,
85
Altruism,
141
Amacrine cell,
54, 57
Amphibians,
18-19
Analog computer,
6-8
Analytical Engine,
65-66, 69
Animal Thinking,
43
Aplysia,
44, 60, 166
Apollo,
51, 101
Apple Computer,
11-12, 37, 85
Apple
11,
128
AppUcations software,
24, 37, 45-46
Arithmometer,
66
ARPAnet,
133
Arthropods,
18-19
Artificial intelligence (Al),
7-10, 13-16,
21, 50-51, 61, 75, 151, 163
Asimov, Isaac,
10
Aspect, Alain,
186
Assemblers,
78-81
Attention span,
114
Automatically Guided Vehicle (AGV),
22
Axelrod, Robert,
141-145
Axons,
53-58
Babbage, Charles,
65-66, 69
Bacteria,
18-19, 43, 61, 69, 144, 167, 183
Barrow, John,
148
Basic,
40
Batch mode,
80
Bees,
43, 61, 138, 151, 168
Bell Laboratories,
66, 71, 82, 132
Bin-picking problem,
36
Binary search,
189
Biotechnology,
72, 108
Bipolar cell,
54-57
Birds,
18-19, 97
Bit,
60, 77, 131, 171-172
Bivalves,
18-19
Black holes,
101, 194
Blinkers,
151
Blocks world,
14
Blue-green algae,
18-19
Body-identity position,
116-118
Body/mind problem,
4, 116
Boeing,
87
Boredom,
47, 63, 91, 114, 153, 179
Bottom-up evolution,
17, 20, 50
Brain,
18-19, 52-54, 59-61, 108-115, 118-
120, 163-165, 190
Brainstem,
110-111
Bulk storage,
77
Bulletin boards, computer,
81, 127-128,
131
C compiler,
132-133
Cairns-Smith, A. G.,
3
Calculation,
66-67, 77, 113, 158, 164,
180
Calculators,
2,
11, 61-62, 65-66, 167, 180
Calculus,
8-10
Camera,
21, 31-32, 48, 88-90, 153, 164
Camera eye,
13, 88
Capacitor,
7
207
208
Index
Capek, Karel,
10
Cart, Stanford,
20, 31-33
Cells,
18-19, 34, 56, 73, 117, 136, 139,
150-152, 155-156, 167
Cellticks,
152-153, 158
Cellular automaton,
150-151, 171, 179
Center-surround,
54, 57, 59
Cephalopods,
18-19
Ceramic chips,
67
Cerebral cortex,
165
Checkers,
8, 15, 150
Chess,
8-9, 13, 78, 171
Cohen, Fred,
128
Colossus,
8
Common sense,
9,
13, 20, 83
Communication,
7, 43, 90, 112-115, 133,
195
Compiler,
79, 120, 132-133
Computation,
58, 120, 148, 163, 166,
169, 188
Computational power,
57, 65, 68
Computer bulletin board,
81
Computer evolution,
36
Computer image,
35
Computer language,
40
Computer model,
35
Computer power,
169
Computer software,
25
Computer system configuration,
9
Computer virus,
126-131, 135
Computer vision,
20, 36, 52
Computer word,
60
Computer modeling,
72
Conditioning,
45-50
Consciousness,
37-40, 43-44, 93, 110-111
Contact,
137
Control language,
40
Control theory,
11
Convergent evolution,
37-39, 42, 57
Conway, John Horton,
151
Cooperation,
141-145
Core dump,
80
Corpus callosum,
111-113
Cray 2,
60-61, 71
Cray 3,
71
Crick, Francis,
151
Crystals,
3, 71-72, 152
Cultural evolution,
2-4
Culture,
4, 18-19, 101, 115-116, 122, 158
Cybernetics,
7-8, 11, 14-16
Darwinian evolution,
3, 17, 44, 158,
167
Data,
135, 139, 171-172
Dawkins, Richard,
136, 159
Death,
4, 18-19, 110-112, 115-121, 138
Defense Advanced Research Projects
Agency (DARPA),
21, 133
Dendrite,
53
Denning Mobile Robotics,
32
Denning Sentry,
33
Descartes, Rene,
180
Determinism,
123, 181
Devol, George,
10
Dexterity,
29-30, 102
Digital Equipment Corporation,
51
Divergence,
187
Diversity,
125, 141
DNA
,
2, 18-19, 61, 108, 116, 136, 151
Dolphins,
19, 115
Dowling, John,
52
Drive,
26
Dualism,
119-120
Dynabook,
84-85
Dyson, Freeman,
148, 195
Earnest, Les,
20
Echinoderms,
18-19
Einstein, Albert,
74, 93, 186
Electric charge,
77
Electric current,
117
Electric motor,
66
Electronic brain,
7
Electronic computer,
62
Electronic library,
86
Electronic map,
89
Electronic switch,
56
Electronic turtle,
7
Electronics,
6, 10, 56
Electrons,
70
Elephants,
19, 61, 115, 168
Elfes, Alberto,
34
Elliot, John,
137
Emergence,
44
Emotion,
37-39, 44, 111
Engelberger, Joseph,
10
EN IAC
,
8, 75-78
Enigma,
8
Everett, Hugh,
187
Index
209
Evolution,
17, 48-50, 55, 82, 100, 115,
119, 122, 136-140, 149, 154, 158, 163,
166
Existence,
141, 158, 178, 190
Expert systems,
9
Extinction,
101
Eye,
9, 19, 32, 39, 52, 57-58, 86-88, 105,
110-112
Feelings,
44, 49, 93, 112
Fermi, Enrico,
138
Fermi paradox,
138
Fifth Generation,
52, 68
Forgetfulness,
42
FORTRAN,
79
Fourier transform,
191-196
Fourth generation,
68
Fovea,
58
Function table,
76
Fungi,
18-19
Galileo,
97
Gallium arsenide (GaAs),
64, 71
Game theory,
141-143
Games,
122, 128
Ganghon,
19, 54, 57-59, 166
Gardner, Martin,
151
Gauss, Carl Friedrich,
120
General Motors,
11, 24, 36
General-purpose robot,
22-25, 38
General relativity,
154
Genetic code,
128
Genetic engineering,
108
Genetic information,
3
Genetic takeover,
3-4
Genetics,
72, 110, 115, 136
Genome,
166
Germanium,
71
Ghosts,
131-134, 185
Giant squid,
19, 115
Gosper, Bill,
155-158
Gravity,
95-97
Gribbin, John,
188-190
Griffin, Donald,
39, 43
Gripper,
23, 29
Growth of Biological Thought,
44
Hackers,
81-83, 132, 141, 151-155
HamUton, William D.,
140, 144
Hand,
9, 29, 34, 86-88, 102, 109-111,
158-159, 180
Hardware,
31, 89, 168, 178, 182
Hash,
155-158
Hashlife,
154-158
Heat death,
147-148
Hidden variables,
186-187, 191-194
High-level language,
51, 79-81, 131-
132, 171
Hitachi,
26-28, 37
Hofstadter, Douglas,
145
Hollerith, Herman,
67
Horizontal cell,
54-57, 164-165
Hoyle, Fred,
137
Human equivalence,
68, 72-73, 100,
109, 167
Human intelligence,
17
Human mind,
1
Human nature,
122
Human vision,
168
Hybrid chip,
64, 67
IBM,
8, 67, 80, 128
IBM 1130,
126
IBM 650,
60
Icon,
82-84
Idea,
116, 138-139, 196
Identity,
109, 115-120, 171
Imagery,
47
Imagination,
48, 133-135, 139, 179
Imaging eye,
19
Immortality,
5, 121-124, 148, 182
Indeterminism,
183, 187, 191-194
Industrial manipulator,
29, 40
Industrial revolution,
2, 8-10, 65
Industrial robot,
11, 23, 36, 47
Industrial vision system,
11
Infinite in All Directions,
148
Information,
63, 114-116, 119, 137, 163,
166-173
Information retrieval,
81
Information theory,
63, 169
Integrated circuit,
7, 55, 64, 67-73, 104,
168
Intelligence,
16-19, 106, 114, 136, 145,
152, 192
Interactive program,
80
Interface Message Processor (IMP),
133
Interim Dynabook,
85
Internal storage,
77
Index of Technological Evolution
- The index lists foundational concepts in computing and robotics, ranging from early hardware like the Jacquard loom and magnetic cores to modern microprocessors and integrated circuits.
- It highlights the intersection of biology and technology, featuring entries for genetic engineering, the human mind, and biological thought alongside machine intelligence.
- Key figures in science and mathematics are referenced, including Galileo, Gauss, and contemporary thinkers like Douglas Hofstadter and Alan Kay.
- The text covers philosophical and speculative themes such as immortality, the 'many worlds' interpretation of quantum mechanics, and the concept of a 'genetic takeover.'
- Significant corporate and institutional contributors to the digital age are documented, including IBM, Hitachi, General Motors, and the Jet Propulsion Laboratory.
Ghosts, 131-134, 185
Index
209
Evolution,
17, 48-50, 55, 82, 100, 115,
119, 122, 136-140, 149, 154, 158, 163,
166
Existence,
141, 158, 178, 190
Expert systems,
9
Extinction,
101
Eye,
9, 19, 32, 39, 52, 57-58, 86-88, 105,
110-112
Feelings,
44, 49, 93, 112
Fermi, Enrico,
138
Fermi paradox,
138
Fifth Generation,
52, 68
Forgetfulness,
42
FORTRAN,
79
Fourier transform,
191-196
Fourth generation,
68
Fovea,
58
Function table,
76
Fungi,
18-19
Galileo,
97
Gallium arsenide (GaAs),
64, 71
Game theory,
141-143
Games,
122, 128
Ganghon,
19, 54, 57-59, 166
Gardner, Martin,
151
Gauss, Carl Friedrich,
120
General Motors,
11, 24, 36
General-purpose robot,
22-25, 38
General relativity,
154
Genetic code,
128
Genetic engineering,
108
Genetic information,
3
Genetic takeover,
3-4
Genetics,
72, 110, 115, 136
Genome,
166
Germanium,
71
Ghosts,
131-134, 185
Giant squid,
19, 115
Gosper, Bill,
155-158
Gravity,
95-97
Gribbin, John,
188-190
Griffin, Donald,
39, 43
Gripper,
23, 29
Growth of Biological Thought,
44
Hackers,
81-83, 132, 141, 151-155
HamUton, William D.,
140, 144
Hand,
9, 29, 34, 86-88, 102, 109-111,
158-159, 180
Hardware,
31, 89, 168, 178, 182
Hash,
155-158
Hashlife,
154-158
Heat death,
147-148
Hidden variables,
186-187, 191-194
High-level language,
51, 79-81, 131-
132, 171
Hitachi,
26-28, 37
Hofstadter, Douglas,
145
Hollerith, Herman,
67
Horizontal cell,
54-57, 164-165
Hoyle, Fred,
137
Human equivalence,
68, 72-73, 100,
109, 167
Human intelligence,
17
Human mind,
1
Human nature,
122
Human vision,
168
Hybrid chip,
64, 67
IBM,
8, 67, 80, 128
IBM 1130,
126
IBM 650,
60
Icon,
82-84
Idea,
116, 138-139, 196
Identity,
109, 115-120, 171
Imagery,
47
Imagination,
48, 133-135, 139, 179
Imaging eye,
19
Immortality,
5, 121-124, 148, 182
Indeterminism,
183, 187, 191-194
Industrial manipulator,
29, 40
Industrial revolution,
2, 8-10, 65
Industrial robot,
11, 23, 36, 47
Industrial vision system,
11
Infinite in All Directions,
148
Information,
63, 114-116, 119, 137, 163,
166-173
Information retrieval,
81
Information theory,
63, 169
Integrated circuit,
7, 55, 64, 67-73, 104,
168
Intelligence,
16-19, 106, 114, 136, 145,
152, 192
Interactive program,
80
Interface Message Processor (IMP),
133
Interim Dynabook,
85
Internal storage,
77
210
Index
Intron,
136
Invertebrate,
42, 56
Jacquard loom,
10
Japanese,
26, 36, 52, 71
Jet Propulsion Laboratory (JPL),
21
Jobs, Steve,
85
Johns Hopkins Beast,
7
Kandel, Eric,
60
Kay, Alan,
84-85
Kepler, Johannes,
98
KL-10,
51
Kubrick, Stanley,
188
Kuffler, Stephen,
52
Language,
2, 9, 83, 93, 113, 132, 135,
153, 171
Laser rangefinder,
21
Lasers,
72, 114
Leg,
22, 26-28, 102, 107
Leonardo da Vinci,
6
Life,
44, 111, 115-116, 123-125, 134-137,
151, 192
Life expectancy,
152
Life extension,
108, 116
Life program,
151-158
Light,
6, 54, 72-73, 93, 154-155, 168,
183-184, 187-188
Lindauer, Martin,
43
Lisa,
85
Location,
31, 34, 37, 45, 48, 96, 171-173
Locomotion,
25-26, 38
Logic,
13
Logic gate,
7, 131
Logic Theorist,
8
Machines,
7, 49, 110-112, 120, 126, 137-
139, 147-150, 167-171
Machine intelligence,
16
Machine language,
77-78, 131-133, 152-
153, 171
Macintosh,
11, 37, 61, 68, 85, 91, 94
MACSYMA
,
9
Magic glasses,
85-94, 110, 123
Magic gloves,
86-88
Magic wardrobe,
90-91, 97
Magnetic core,
77-78
Magnetic disk,
77
Magnetic field,
70
Magnetic memory,
10
Magnetic resonance,
109
Magnetic tape,
80, 112, 126
Mammals,
18-19
Manipulation,
38, 84, 195
Manipulator,
31, 36, 90, 110
Manual labor,
25, 101
Manufacturer's learning curve,
23
Many worlds,
187-189
Mapping,
31-34, 37, 43, 48, 89-90, 152
Mass,
94-97, 148
Mass production,
66
Mathematical logic,
14
Mathematical notation,
79
Mathematics,
82, 93, 108, 121, 149, 158,
164, 178, 181-183
Matter,
118
Matter transmitter,
117-118
Matthies, Larry,
32-34
Mayr, Ernst,
44
McCarthy, John,
8, 20
Memory,' 57, 60-66, 77-81, 85, 96-97,
114-116, 119-122, 135, 145, 158, 167,
170-172, 196
Menu,
82-84
Microbes,
141
Microcomputer,
36, 127
Microelectronics,
72
Microfauna,
144
Micromachining,
104
Microorganism,
144
Microphone ear,
7, 13
Microprocessor,
64, 68, 71
Microtechnology,
73
Mind,
44, 109-121, 124, 158, 178
Mind transferral,
115, 117
Mind/body problem,
4, 116
Minsky, Marvin,
8-10
Mitochondria,
18-19
Mobile platform,
153
Mobile robot,
14, 20-21, 29, 32, 37
Mobility,
15-17, 28, 31, 40, 85, 153
Mollusks,
18-19
Moore, Gordon,
68
Motion detector,
59
Motivation,
116
Mouse,
61, 83, 168-169
Multicelled animals,
15, 18-19
Multifingered gripper,
29
Multiprocessor,
62, 121, 182
Index of a Postbiological Future
- The index highlights a transition from biological systems to a 'postbiological world' through concepts like mind transferral and pattern-identity.
- Key technological milestones are tracked, including the evolution from vacuum tubes and punched cards to nanotechnology and quantum computing.
- The text emphasizes the intersection of robotics and biology, listing entries for nervous systems, neurons, and multicelled animals alongside mobile platforms.
- Theoretical physics and mathematics play a significant role, with references to quantum mechanics, relativity, and nondeterministic polynomial (NP) problems.
- The scope of the work includes the social and evolutionary implications of artificial life, such as the Prisoner's Dilemma, natural selection, and personal identity.
Mind transferral, 115, 117; Mind/body problem, 4, 116; Postbiological world, 1, 5, 125, 141, 145.
210
Index
Intron,
136
Invertebrate,
42, 56
Jacquard loom,
10
Japanese,
26, 36, 52, 71
Jet Propulsion Laboratory (JPL),
21
Jobs, Steve,
85
Johns Hopkins Beast,
7
Kandel, Eric,
60
Kay, Alan,
84-85
Kepler, Johannes,
98
KL-10,
51
Kubrick, Stanley,
188
Kuffler, Stephen,
52
Language,
2, 9, 83, 93, 113, 132, 135,
153, 171
Laser rangefinder,
21
Lasers,
72, 114
Leg,
22, 26-28, 102, 107
Leonardo da Vinci,
6
Life,
44, 111, 115-116, 123-125, 134-137,
151, 192
Life expectancy,
152
Life extension,
108, 116
Life program,
151-158
Light,
6, 54, 72-73, 93, 154-155, 168,
183-184, 187-188
Lindauer, Martin,
43
Lisa,
85
Location,
31, 34, 37, 45, 48, 96, 171-173
Locomotion,
25-26, 38
Logic,
13
Logic gate,
7, 131
Logic Theorist,
8
Machines,
7, 49, 110-112, 120, 126, 137-
139, 147-150, 167-171
Machine intelligence,
16
Machine language,
77-78, 131-133, 152-
153, 171
Macintosh,
11, 37, 61, 68, 85, 91, 94
MACSYMA
,
9
Magic glasses,
85-94, 110, 123
Magic gloves,
86-88
Magic wardrobe,
90-91, 97
Magnetic core,
77-78
Magnetic disk,
77
Magnetic field,
70
Magnetic memory,
10
Magnetic resonance,
109
Magnetic tape,
80, 112, 126
Mammals,
18-19
Manipulation,
38, 84, 195
Manipulator,
31, 36, 90, 110
Manual labor,
25, 101
Manufacturer's learning curve,
23
Many worlds,
187-189
Mapping,
31-34, 37, 43, 48, 89-90, 152
Mass,
94-97, 148
Mass production,
66
Mathematical logic,
14
Mathematical notation,
79
Mathematics,
82, 93, 108, 121, 149, 158,
164, 178, 181-183
Matter,
118
Matter transmitter,
117-118
Matthies, Larry,
32-34
Mayr, Ernst,
44
McCarthy, John,
8, 20
Memory,' 57, 60-66, 77-81, 85, 96-97,
114-116, 119-122, 135, 145, 158, 167,
170-172, 196
Menu,
82-84
Microbes,
141
Microcomputer,
36, 127
Microelectronics,
72
Microfauna,
144
Micromachining,
104
Microorganism,
144
Microphone ear,
7, 13
Microprocessor,
64, 68, 71
Microtechnology,
73
Mind,
44, 109-121, 124, 158, 178
Mind transferral,
115, 117
Mind/body problem,
4, 116
Minsky, Marvin,
8-10
Mitochondria,
18-19
Mobile platform,
153
Mobile robot,
14, 20-21, 29, 32, 37
Mobility,
15-17, 28, 31, 40, 85, 153
Mollusks,
18-19
Moore, Gordon,
68
Motion detector,
59
Motivation,
116
Mouse,
61, 83, 168-169
Multicelled animals,
15, 18-19
Multifingered gripper,
29
Multiprocessor,
62, 121, 182
Index
211
Nanocomputer,
73
Nanotechnology,
73, 104
NASA,
21
Natural selection,
44, 145
Naval Ocean Systems Center (NOSC),
88
Neptune robot,
32
Nerve,
57, 111, 117
Nerve cell,
53
Nerve network,
16
Nervous system,
4, 7, 16-17, 39, 42-44,
52-55, 116, 163-166
Network,
56, 84-86, 90, 98, 120, 129,
133-134
Neuroanatomy,
111
Neurobiology,
52, 57
Neuron,
16-19, 44, 53-56, 59-60, 108-
110, 163-167
Neurotransmitter,
55
Neutron,
114, 123
Neutron star,
74, 114, 123
Newell, Allen,
8
Newton, Isaac,
94, 97-98, 154
Newway,
152-153, 157-158
Nilsson, Nils,
14
Nondeterminism,
189
Nondeterministic polynomial (NP)
problems,
106, 179-183
Nonverbal knowledge,
25
Nucleated
cell,
18-19
Object finding,
35
Obstacle avoidance,
38
Octopus,
42, 56
Odetics,
26-27
Odex,
27
Office of Naval Research,
21
Optic nerve,
57-58, 111
Optics,
72, 86
Optimizing compiler,
120
Organisms,
105, 135, 139-140, 146, 166-
167
Pain,
42, 45-49
Parallel world,
154
Parallel-jaw gripper,
29
Parasites,
126, 133, 136, 139-140, 144-
146
PARC,
83-85
Pattern,
117-122, 150-158, 165, 178, 184
Pattern-identity,
117-119, 122-123
PDP-10
,
51
Perception,
15-17, 55, 75, 167
Perfection,
125, 131
Person,
117-119, 178
Personal computer,
24, 37, 68, 83-84,
127-128
Personal death,
121
Personal identity,
109
Personality,
111, 115
Perspective,
110
Pestilence,
139
Pests,
125, 145
Phobia,
46
Photocell,
7, 54-58, 117, 164-165
Photon,
70, 148, 183-186
Photoreceptor,
56
Physics,
15, 71, 74, 93, 96, 107, 147-152,
183, 190-192
Pixar,
92
Pixel,
58
Planck, Max,
73
Planck's constant,
73
Planets,
101, 114, 123-124
Planning,
9, 14, 36, 139
Plants,
16-19, 139
Pocket calculators,
100
Pocket televisions,
86
Point Reyes,
92
Polaroid,
32
Postbiological world,
1,
5, 125, 141, 145
Power,
26-29, 49, 61, 93, 106, 134, 148,
169-172
Power per unit cost,
52
Predators,
129-131
Predictability,
39, 63, 154-156, 171
Prediction,
48, 123, 155-156, 164
Pressure,
86-88, 108, 148, 191-194
Prey,
47, 129-131, 139
Price,
62, 65, 137
Primitive action,
15, 40
Prisoner's dilemma,
141-144
Probability,
34, 45, 143, 170
Problem size,
181
Problem solving,
14, 51
Process,
117-120
Processing power,
51, 63, 170-171
Program,
62-63, 76, 79-82, 109-114, 120,
123, 126-136, 141-143, 153-154, 163-
166, 171, 178-180
212
Index
Programmer,
60, 79-81, 126, 131-132
Programming,
93, 135
Protein,
72-73
Proxy robot,
88-91
Pulsars,
183
Punched card,
10, 65-67, 80, 126
Punched tape,
126
Punishment,
81
Purpose,
152-153
Quantum,
70-73, 123, 149, 153-154, 179,
183-187, 191-196
Quantum dot,
71
Radiation,
70, 108, 147, 195
Radio,
61, 67-69, 84, 106
Radio technology,
6
Radio telescope,
136
Radio tube,
7
Radioactivity,
186, 189
RAND,
8
Randell, Brian,
65
Random,
123, 135, 139, 143, 152, 157,
189
Range,
32-34
Rangefinder,
21
Rapoport, Anatol,
143
Reasoning,
13, 50, 75, 113, 149, 182
Reasoning program,
13-15, 20
Receiver,
117-118, 136
Reflex arc,
105
Relativity,
99, 149, 153
Relay,
62, 66-67, 168
Remote control,
6, 14, 21
Replication,
151-152, 182
Reproduction,
3-4, 18-19, 129, 136-140,
144, 182-183, 188
Reptiles,
18-19
Retina,
19, 52-59, 163-166
Retrovirus,
136
Ribosomes,
72
Ritchie, Dennis,
132
RNA
,
72, 136
Robot arm,
9-14, 20-22, 29, 40, 73
Robot bush,
102-108
Robot control program,
24
Robot hand,
13, 22, 29
Robot proxy,
90
Robot security guard,
32
Robot servant,
23
Robotics,
10-17, 20-22, 167
Robotics industry,
48
Robotics Institute,
32
Robotics Research Vehicle (RRV),
21
Rosen, Charles,
14
Roving burglar alarm,
32
Roving robot,
39-40, 43-44
Sabotage,
128
Sagan, Carl,
137
Salisbury Hand,
30
Salisbury, Ken,
29-31, 37
Samuel, Arthur,
8
Scanning tunelling microscope,
72
Schrodinger, Erwin,
186
Science fiction,
10, 23, 117
Screen,
84, 90-91, 152, 184-186
Screen editor,
51
Sea slug,
44, 60, 166
Sea urchin,
19
Second law of thermodynamics,
147
Self replication,
135, 150, 165
Self reproduction,
102, 133-135, 151
Selfishness,
141-144
Semiconductor,
71-72, 102
Sense,
93-94
Sensorimotor ability,
15-17
Sensors,
6, 23, 32, 39-42, 45, 87, 104
Serrey, Bruno,
34
SETl',
136-137
Seven Clues to the Origin of Life,
3
Sex,
18-19, 115, 128, 131, 135, 139-140
Shakey,
14-15, 20
Shannon, Claude,
8, 63, 169
Shaw, John,
8
Shellfish,
19
Sikorsky,
87
Silicon,
68, 71, 78
Silicon carbide,
71
Simon, Herbert,
8
Simulation,
48, 91, 98, 108-110, 120,
123-124, 152-157, 164-166, 178-179
Simulator,
48-50, 123
Single-cell animal,
19
Skyhook,
94
Slug,
60
Snails,
61, 168
Social insects,
19
Software,
89, 127-133, 168, 182
Solar power,
19, 102
Index of Robotics and Intelligence
- The index covers the evolution of robotics from early projects like Shakey and the Stanford Cart to advanced concepts in superintelligence.
- Key biological and evolutionary themes are present, linking artificial systems to sea slugs, social insects, and the 'Selfish Gene' theory.
- A significant portion of the text focuses on the intersection of computer science and physics, including thermodynamics, quantum superposition, and spacetime.
- The entries detail the technical components of robotics, such as sensors, sonar, stereoscopic vision, and the transition from vacuum tubes to semiconductors.
- Speculative and philosophical topics are indexed, including self-replication, the soul, transmigration, and the ultimate fate of the universe.
Self replication, 135, 150, 165; Self reproduction, 102, 133-135, 151; Selfishness, 141-144; Semiconductor, 71-72, 102.
212
Index
Programmer,
60, 79-81, 126, 131-132
Programming,
93, 135
Protein,
72-73
Proxy robot,
88-91
Pulsars,
183
Punched card,
10, 65-67, 80, 126
Punched tape,
126
Punishment,
81
Purpose,
152-153
Quantum,
70-73, 123, 149, 153-154, 179,
183-187, 191-196
Quantum dot,
71
Radiation,
70, 108, 147, 195
Radio,
61, 67-69, 84, 106
Radio technology,
6
Radio telescope,
136
Radio tube,
7
Radioactivity,
186, 189
RAND,
8
Randell, Brian,
65
Random,
123, 135, 139, 143, 152, 157,
189
Range,
32-34
Rangefinder,
21
Rapoport, Anatol,
143
Reasoning,
13, 50, 75, 113, 149, 182
Reasoning program,
13-15, 20
Receiver,
117-118, 136
Reflex arc,
105
Relativity,
99, 149, 153
Relay,
62, 66-67, 168
Remote control,
6, 14, 21
Replication,
151-152, 182
Reproduction,
3-4, 18-19, 129, 136-140,
144, 182-183, 188
Reptiles,
18-19
Retina,
19, 52-59, 163-166
Retrovirus,
136
Ribosomes,
72
Ritchie, Dennis,
132
RNA
,
72, 136
Robot arm,
9-14, 20-22, 29, 40, 73
Robot bush,
102-108
Robot control program,
24
Robot hand,
13, 22, 29
Robot proxy,
90
Robot security guard,
32
Robot servant,
23
Robotics,
10-17, 20-22, 167
Robotics industry,
48
Robotics Institute,
32
Robotics Research Vehicle (RRV),
21
Rosen, Charles,
14
Roving burglar alarm,
32
Roving robot,
39-40, 43-44
Sabotage,
128
Sagan, Carl,
137
Salisbury Hand,
30
Salisbury, Ken,
29-31, 37
Samuel, Arthur,
8
Scanning tunelling microscope,
72
Schrodinger, Erwin,
186
Science fiction,
10, 23, 117
Screen,
84, 90-91, 152, 184-186
Screen editor,
51
Sea slug,
44, 60, 166
Sea urchin,
19
Second law of thermodynamics,
147
Self replication,
135, 150, 165
Self reproduction,
102, 133-135, 151
Selfishness,
141-144
Semiconductor,
71-72, 102
Sense,
93-94
Sensorimotor ability,
15-17
Sensors,
6, 23, 32, 39-42, 45, 87, 104
Serrey, Bruno,
34
SETl',
136-137
Seven Clues to the Origin of Life,
3
Sex,
18-19, 115, 128, 131, 135, 139-140
Shakey,
14-15, 20
Shannon, Claude,
8, 63, 169
Shaw, John,
8
Shellfish,
19
Sikorsky,
87
Silicon,
68, 71, 78
Silicon carbide,
71
Simon, Herbert,
8
Simulation,
48, 91, 98, 108-110, 120,
123-124, 152-157, 164-166, 178-179
Simulator,
48-50, 123
Single-cell animal,
19
Skyhook,
94
Slug,
60
Snails,
61, 168
Social insects,
19
Software,
89, 127-133, 168, 182
Solar power,
19, 102
Index
213
Solar system,
101, 116
Sonar, V, 22, 32-34, 37, 41
Songbirds,
136
Soul,
183
Sound,
6, 86, 106, 185, 191-194
Space,
94, 108, 130, 140, 147-150, 154,
157-158, 196
Spacesuit,
89
Spacetime,
156-158
Special relativity,
194
Species,
119, 140
Spectrum,
136
Speech,
86, 96
Speed,
32, 62, 112, 154, 165, 172, 188,
195
Speed of light,
155
Sperm whale,
19, 61, 168
Sperry, Roger,
111
Spider,
43
Spinal cord.
111
Split brain.
111
Spontaneous generation,
133
Spontaneous mutation,
17
Spores,
144
Sputnik,
21
Stanford Artificial Intelligence Lab
(SAIL),
12
Stanford Artificial Intelligence Project,
20
Stanford Cart,
20, 31
Stanford Research Institute (SRI),
14,
20
Star,
85
Starfish,
19
Steam engine,
147
Steam power,
65
Stem cell,
53
Stereoscopic vision,
38
Storage,
77, 122, 178
Stored program,
77
STRIPS,
14-15
Subminiature radio tube,
7
Supercomputers,
36, 52, 60, 68-71, 120,
169
Superconductors,
70-71, 142
Supercurrent,
168
Superintelligence,
102, 107-108, 122,
125, 145, 147, 178-179, 182
Superlattice,
70
Superposition,
179, 186, 193-194
Sujjerstrings,
74
Superstructure,
167
Surprise,
17, 37, 40, 44, 63-65, 139, 158,
169-172
Surreptitiousness,
127
Symbiosis,
75, 138, 145
Symbolic programming,
78
Synapse,
44, 53-61, 165-166
Synchotron,
70
Synthetic imagery,
86
System manager,
128
Tape,
66-67, 81, 119, 122, 129, 150-151,
173
Television,
14, 23, 33-37, 56-61, 69, 86,
153, 164
Television camera,
7-9, 12-14, 31-33, 86
Teraops,
59-62, 68, 72
The Anthropic Cosmological Principle,
149
The Extended Phenotype,
136
The Selfish Gene,
136
The Walk,
96
Thermodynamics,
147
Thompson, Ken,
132-133
Thorpe, Chuck,
32
Thought,
93, 112, 116, 119, 122, 148-
149, 167
Tune,
115, 123, 130, 147-150, 154-158,
166, 172, 179-183, 194-195
Time bomb,
126-128, 131, 136
Time sharing,
51, 80-84
Tipler, Frank,
148
Tit for tat,
143
Tools,
2, 18-19, 29, 73-75, 102, 105-106
Top-down approach,
16, 20, 50
Torres Arithmometer,
66
Torres y Quevedo, Leonardo,
66
Touch,
86, 105
Transcription,
1 22
Transformation,
13, 120-121, 149, 191-
194
Transistor,
64, 67, 71, 78, 168
Transition,
1 70
Transition rule,
152-154
Transition table,
150
Transmigration,
108
Transmitter,
117-118
Transplant,
109, 121-124
Transportation,
29, 90
214
Index
Traveling salesman problem,
181, 189-
190
Trojan horse,
126-128
Tubes, vacuum,
64, 67, 78, 168
Turing, Alan,
8, 132
Turing Award,
132
Two-slit experiment,
183-184, 187
Uncertainty,
123, 191-194
Unicelled ancestor,
19
Unimation,
10
UNIVAC
I
,
67
Universal robot,
29, 34, 45, 48
Universality,
150-151, 154
Universe,
101-102, 108, 116, 138-139,
147-154, 158, 179, 187-196
Unix,
82, 132
Unpredictability,
145
Uranus robot,
34
Utilitarianism,
44
Vacuum tube,
64, 67, 77, 168
Verbal interface,
39
Verbal knowledge,
25
Vertebrate,
18-19, 42-45, 53, 56, 111
Video recorder,
61
Viking,
21, 101
Virulence,
128, 138
Virus,
61, 101, 126-132, 135-137, 145
Vision,
36-41, 52, 105, 145, 158-159, 165
Vision system,
11-12
Visual acuity,
58
Visual field,
111-112
von Frisch, Otto,
43
von Neumann, John,
8, 75-76, 150-151,
171
Voyager,
123
Walking robot,
26
Walter, W. Grey,
7
Wasp,
47
Watson, James,
151
Waves,
184-187
Wave mode,
191-194
Waveform,
188
Wavelength,
71, 148, 191-195
Wavelike,
150
Whales,
19, 61, 115
Wheels,
26
Wheels, Life and Other Diversions,
151
White dwarf,
74
Wiener, Norbert,
7
Wildlife,
125, 128, 131-133, 139-141
Word-recognizer,
46
Word processor,
24
World knowledge,
13
World model,
39
World simulator,
48
Worms,
17, 136
X-rays,
70, 122
Xerox,
85
Xerox Palo Alto Research Center
(PARC),
83
Zuse, Konrad,
66
Mind Children Index and Reviews
- The text provides a comprehensive index of topics ranging from biological concepts like vertebrates and viruses to technological milestones like Unix and vacuum tubes.
- Prominent scientific figures such as John von Neumann, James Watson, and Norbert Wiener are referenced, highlighting the book's interdisciplinary scope.
- Critical reviews describe the work as an exhilarating and 'tonic' exploration of the future that challenges readers to look beyond the present.
- The author, Hans Moravec, is identified as a world-class roboticist and Director of the Mobile Robot Laboratory at Carnegie Mellon University.
- Reviewers emphasize the book's unique blend of academic accuracy and the compelling narrative drive of a novel.
Moravec, by his own admission, is an intellectual joyrider, and riding his runaway trains of thought is an exhilarating experience.
214
Index
Traveling salesman problem,
181, 189-
190
Trojan horse,
126-128
Tubes, vacuum,
64, 67, 78, 168
Turing, Alan,
8, 132
Turing Award,
132
Two-slit experiment,
183-184, 187
Uncertainty,
123, 191-194
Unicelled ancestor,
19
Unimation,
10
UNIVAC
I
,
67
Universal robot,
29, 34, 45, 48
Universality,
150-151, 154
Universe,
101-102, 108, 116, 138-139,
147-154, 158, 179, 187-196
Unix,
82, 132
Unpredictability,
145
Uranus robot,
34
Utilitarianism,
44
Vacuum tube,
64, 67, 77, 168
Verbal interface,
39
Verbal knowledge,
25
Vertebrate,
18-19, 42-45, 53, 56, 111
Video recorder,
61
Viking,
21, 101
Virulence,
128, 138
Virus,
61, 101, 126-132, 135-137, 145
Vision,
36-41, 52, 105, 145, 158-159, 165
Vision system,
11-12
Visual acuity,
58
Visual field,
111-112
von Frisch, Otto,
43
von Neumann, John,
8, 75-76, 150-151,
171
Voyager,
123
Walking robot,
26
Walter, W. Grey,
7
Wasp,
47
Watson, James,
151
Waves,
184-187
Wave mode,
191-194
Waveform,
188
Wavelength,
71, 148, 191-195
Wavelike,
150
Whales,
19, 61, 115
Wheels,
26
Wheels, Life and Other Diversions,
151
White dwarf,
74
Wiener, Norbert,
7
Wildlife,
125, 128, 131-133, 139-141
Word-recognizer,
46
Word processor,
24
World knowledge,
13
World model,
39
World simulator,
48
Worms,
17, 136
X-rays,
70, 122
Xerox,
85
Xerox Palo Alto Research Center
(PARC),
83
Zuse, Konrad,
66
$8.95
"One would be making a mistake to let Mind Children recede unopened into
a guiltless oblivion. It's a tonic book, thought-provoking on everv page. And
it reminds us that, in our accelerating, headlong era, the future presses so
close upon us that those who ignore it inhabit not the present but the past."
— Brad Leithauser, Nezv Yorker
"A comprehensive and highly readable survey of the
state of the art in
robotics."
—M. Mitchell Waldrop, New York Times Book Review
"Moravec, by his own admission, is an intellectual joyrider, and riding his
runaway trains of thought is an exhilarating experience
.
.
. This is an intel-
lectual party that shouldn't be pooped, no matter how much it may disturb
the neighbours and encourage over-indulgence."
— Brian WooUey, Guardian
"[Mind Children] has the accuracy of a college text and the can't-put-it-down
appeal of a good novel. Moravec has turned the flights of mind of one of the
world's foremost roboticists into hard copy. And he has written a tremen-
dously good book in the process."
— Eric Bobinsky, Bifte
"A dizzying display of intellect and wild imaginings by Moravec, a world-
class roboticist who has himself developed clever beasts
.
.
. Undeniably,
Moravec comes across as a highly knowledgeable and creative
talent —
which is just what the field needs."
— Kirkus Reviews
Hans Moravec
is
Director of the Mobile Robot Laboratory of Carnegie
Mellon University.
Harvard University Press
Cambridge, Massachusetts
and London, England
Jacket design bif Joyce C. Weston. Illustrations cour-
tesy of: (front left) © Marjorie Nichols '87/Boston
Computer Museum/Maxell Tapes; (front right)
Christopher Croioley and The Media Laboratory
of MIT, ©MIT
ISBN
D-b7M-57t3lfl-7
90000
9
780674"576186
The Rise of Mind Children
- Humanity is on the verge of creating 'postbiological' descendants—intelligent machines that will eventually transcend human complexity.
- These 'children of our minds' may preserve the entirety of human knowledge and even the specific workings of individual human minds.
Unleashed from the plodding pace of biological evolution, the children of our minds will be free to grow to confront immense and fundamental challenges in the larger universe.
The Second Genetic Takeover
- Intelligent machines may soon carry on cultural evolution independently, rendering biological DNA obsolete in the evolutionary race.
- The eventual autonomy of machines in their own reproduction and self-improvement will mark a second complete genetic takeover.
When that happens, our DNA will find itself out of a job, having lost the evolutionary race to a new kind of competition.
The Postbiological Mind
- The computer model suggests that a mind's 'process' could theoretically be transferred to new hardware, bypassing biological mortality.
- A world of self-improving 'mind children' would represent a shift in evolution as significant as the transition from chemistry to biology.
A computation in progress—what we can reasonably call a computer's thought process—can be halted in midstep and transferred, as program and data read out of the machine's memory, into a physically different computer, there to resume as though nothing had happened.
The Evolution of Intelligence
- The human brain's sensory and motor systems contain a billion years of evolutionary experience that supports the thin veneer of conscious reasoning.
- The vast majority of human thought is unconscious and inaccessible to introspection, making it the most difficult part of intelligence to formalize.
The deliberate process we call reasoning is, I believe, the thinnest veneer of human thought, effective only because it is supported by this much older and much more powerful, though usually unconscious, sensorimotor knowledge.
Bottom-Up Intelligence Evolution
Our intelligence, as a tool, should allow us to follow the path to intelligence, as a goal, in bigger strides than those originally taken by the awesomely patient, but blind, processes of Darwinian evolution.
Hybrid Mobility and Dexterity
The Hitachi machines climb stairs by rolling up to them on five wheels, raising the leading one to the height of the first stair, driving forward until the raised leg is securely over the step, lowering it slightly until the contact is firm, and then continuing with the next nearest leg.
Robotic Dexterity and Navigation
In repeated cautious lurches, the Cart was to creep safely to its destination.
The Evolution of Robot Mapping
The robot still crossed the room correctly only about three times out of four.
Robot Vision and Recognition
A robot that spends up to an hour considering every simple move is clearly unacceptable, but a few seconds would be tolerable.
The General-Purpose Robot
- Future robots will require computing power of at least a billion operations per second, likely achieved within a decade.
- Advanced robots maintain internal world models that allow them to plan actions, learn from the past, and potentially explain their motivations.
If a stairwell-detecting module concludes that hazard is near, it would take over control of the robot until the danger was past.
Convergent Evolution of Machine Consciousness
In these internal models of the world I see the beginnings of awareness in the minds of our machines—an awareness I believe will evolve into consciousness comparable with that of humans.
Robotic Logic and Anthropomorphism
The fourth door, sadly, leads to the stairwell, and the poor robot, unequipped to travel on stairs, is in mortal danger.
Convergent Evolution of Mind
- The author argues that robots, octopuses, and humans exhibit convergent evolution in behavior due to the shared requirements of a mobile lifestyle in a dangerous world.
- Animal consciousness is framed as an internal model of the self and surroundings that allows for the consideration of alternative actions.
The needs of the mobile way of life have conspired in all three instances to create an entity that has modes of operation for different circumstances and that changes quickly from mode to mode on the basis of uncertain and noisy data prone to misinterpretation.
Emergence and Machine Learning
- The author argues that complex traits like consciousness emerge from whole systems and cannot be deduced from individual components.
- Current robots have limited learning capacities, but future machines will require general learning abilities to navigate unpredictable environments.
Emergence—this appearance of novel properties in whole systems has often been invoked to explain such difficult biological realities as mind, consciousness, and even life itself.
Mapping Neural Circuitry
There are some dangerous curves in this joyride to human equivalence, so hold on!
Quantifying the Human Mind
- By extrapolating retinal complexity to the whole brain, the author estimates human intelligence requires roughly 10 trillion calculations per second.
- Current supercomputers are approximately 1,000 times slower than the estimated processing power of the human brain.
I rashly conclude that the whole brain's job might be done by a computer performing 10 trillion (10^13) calculations per second.
Information Theory and Computation
The second story seems more interesting and informative because its later statements are less likely—cats usually have fur and claws, but they rarely carry hats and guns.
The Rise of Nanotechnology
- The scanning tunneling microscope provides a critical 'toehold' on the atomic scale, allowing for the direct manipulation of individual atoms.
- Future nanotechnology aims to fuse biology and microelectronics to create protein robots capable of building materials atom-by-atom.
These would be small enough to grab individual molecules and hold them, thermally wriggling, in place.
The Birth of Stored Programs
Instead of a rat's nest of wires, a program consisted of neat columns of numbers.
The Magic Wardrobe
Each finger of the glove contains a grid of elements that create patterns of pressure and temperature on the finger of the wearer.
The Robot Proxy and Navigation
The operator has the subjective sensation of being in the robot's body.
Unreal Estate and Bare-Hands Programming
Einstein, for instance, reported that he could often feel the meaning of his equations in his arms and his body as if they were solid objects.
The Evolutionary Imperative of AI
- Human intelligence is not an upper bound, and machines will inevitably outclass biological cognition as they scale.
- Future space-based industries will likely consist of self-replicating robot factories that outpace human population growth.
The universe is one random event after another.
The Rise of Robot Bushes
These new creations, looking quite unlike the machines we know, will explode into the universe, leaving us behind in a cloud of dust.
The Digital Migration
- Mind transfer could occur gradually as a computer replaces fading biological functions, eventually hosting the entire consciousness.
- Digitized minds could manipulate their own 'speed' settings, allowing them to think and react thousands of times faster than biological humans.
Ultimately your brain would die, and your mind would find itself entirely in the computer.
The Pattern of Identity
- Identity is defined as the information pattern of a person rather than the physical medium on which it is encoded.
- A simulated mind could remain continuous and uninterrupted even while its underlying physical location and hardware change constantly.
Old instincts are not automatically erased when the rules of life are suddenly rewritten.
Simulated Realities and Postbiological Evolution
- A superdense simulator could model Earth at an atomic scale, creating simulated people who are as real as biological ones under the pattern-identity theory.
- The postbiological world will evolve rapidly, ranging from tiny intelligences to star-spanning superminds that function like cooperative ant colonies.
Resurrecting one small planet should be child's play long before our civilization has colonized even its first galaxy.
Digital Immune Systems
Today's computer systems are like bodies with skins but no immune systems, or like walled cities without police.
Sex, Disease, and Cooperation
- Sexuality provides a long-term evolutionary advantage by accelerating the rate of genetic variation despite the high immediate cost of reproduction.
- The primary driver for sexual reproduction is the threat of disease, as genetic diversity prevents parasites from wiping out entire populations of identical clones.
A parasite that has the key to one lock finds that the next one is subtly different and thus harder to open.
The Logic of Cooperation
Each Martian gives the other a broken unit and leaves the meeting gloating over having made a shrewd deal. But as night falls, both Martians find themselves in the dark.
Cooperation and Cosmic Survival
- Postbiological entities with long memories and high intelligence are likely to favor cooperation over conflict, as interactions are rarely seen as final.
- As the universe cools toward absolute zero, the energy required for computation and signal transmission decreases, allowing for more thought with less power.
In time the entire universe will become a homogeneous stew with no concentrations of matter or energy to form or power any kind of machinery, intelligent or otherwise.
Reasoning and Cellular Automata
- Future machine intelligence will likely balance pure cerebration with active exploration and massive engineering projects.
- The discovery of DNA revealed that biological life uses a 'tape' system for construction similar to von Neumann's theoretical machines.
In a final step a "breath of life" signal is transmitted to the painting that converts its quiescent states to active ones.
The Hashlife Spacetime Pyramid
A single glider advancing across the screen would cause a display where gliders would appear and disappear in odd places almost at random, sometimes several in view, sometimes none.
Evolutionary Design vs. Computer Architecture
Darwinian evolution is a relentless optimizer of a given design, nudging the parameters this way and that, adding a step here, removing one there, in a plodding, tinkering, way.
The Nautical Metaphor of Computing
Some computations are like a trip to a known location on a distant shore; others resemble a mapless search for a lost island.
Evolution of Computing Power
1943 — Colossus (vacuum tube) ... 1976 — Apple II (integrated circuit) ... 1976 — Cray-1 (integrated circuit)
The Outer Limits of Computation
Existence in the thoughts of an intelligent beholder is fundamentally no different than existence in a computer simulation, and we have already suggested that a mind can be satisfactorily encoded in a computer.
Quantum Simulations and Computational Limits
Just what it all really means is still a matter for fascinating speculation; the only consensus is that the truth is very weird.
The NP-Completeness Challenge
- The traveling-salesman problem exemplifies NP problems where the number of possible solutions grows exponentially with each added variable.
- Future superintelligences may overcome these limits by physically replicating small computing units to act as a massive, real-world multiprocessor.
A hypothetical computer able to explore all possible paths simultaneously (a mere mathematical abstraction known as a nondeterministic machine because it does not make up its mind at branchpoints but splits into two machines and goes both ways) could, in principle, solve the problem in polynomial time.
Quantum Computation and Exponential Growth
If, in one 'generation' time step, a machine can do either a certain amount of computation or reproduce itself once, the best strategy would be to reproduce like mad until there are as many machines as there are alternatives to examine.
Quantum Superposition and Many Worlds
- Modern experiments by Alain Aspect have largely ruled out local hidden-variable theories, confirming the 'absurd' non-local nature of quantum mechanics.
- Hugh Everett's 'Many Worlds' interpretation suggests that instead of a wave collapse, the universe branches into different realities at every decision point.
Schrodinger considered absurd the theory's description of the unopened box as a mixed state superimposing a live and a dead cat.
The Many-Worlds Divergence
- The many-worlds theory suggests a form of quantum immortality or survival bias where observers only exist in universes where catastrophe was avoided.
- The idea implies that even if a cosmic disaster occurs in most branches, consciousness persists in the remaining viable timelines.
The word 'astronomical' hardly begins to capture the number of distinct universes created every instant under this idea.
Origins of a Mechanical Vision
Over several articles he had developed the concept of achieving immortality, and much else, by replacing a human nervous system, bit by bit, with a more durable artificial equivalent.
Index of a Postbiological Future
- The index highlights a transition from biological systems to a 'postbiological world' through concepts like mind transferral and pattern-identity.
- Theoretical physics and mathematics play a significant role, with references to quantum mechanics, relativity, and nondeterministic polynomial (NP) problems.
Mind transferral, 115, 117; Mind/body problem, 4, 116; Postbiological world, 1, 5, 125, 141, 145.
Index of Robotics and Intelligence
- The index covers the evolution of robotics from early projects like Shakey and the Stanford Cart to advanced concepts in superintelligence.
- Speculative and philosophical topics are indexed, including self-replication, the soul, transmigration, and the ultimate fate of the universe.
Self replication, 135, 150, 165; Self reproduction, 102, 133-135, 151; Selfishness, 141-144; Semiconductor, 71-72, 102.